
基于自适应K-means++的线序特征值提取方法研究
2021-06-28 00:10惠婉玉吴玉秀张文忠
现代信息科技 2021年1期
关键词:色差
惠婉玉 吴玉秀 张文忠

摘 要:自适应K-means++被用于提取线束连接器的主色特征值。首先对相机采集的图像进行去噪和增强对比度的操作;然后进行图像灰度化处理,通过大津阈值法分离线束主体与背景;再根据Canny算子提取每根导线的轮廓,由轮廓位置获取增强图像对应的图像块;最后通过线宽选取聚类区域并利用自适应K-means++提取主色特征值。实验通过中位切分法、K-means及自适应K-means++分别提取特征值,并与人眼视觉观测的特征值进行色差对比。实验表明自适应K-means++方法提取的特征值较准确。
关键词:线束连接器;主色特征值;自适应K-means++;色差
中图分类号:TP391.41 文献标识码:A 文章编号:2096-4706(2021)01-0071-06
Research on Line Order Eigenvalue Extraction Method Based on Adaptive K-means++
HUI Wanyu,WU Yuxiu,ZHANG Wenzhong
(School of Electrical and Information Engineering,Anhui University of Techology,Maanshan 243032,China)
Abstract:Adaptive K-means++ is used to extract the dominant color eigenvalue of the harness connector. First,denoise and enhance the contrast of the image collected by the camera;then the image is grayed,and the main body and background are separated by Otsu threshold method;then,the contour of each wire is extracted according to Canny operator,and the image block corresponding to the enhanced image is obtained from the contour position;finally,the clustering region is selected by linewidth and the dominant color eigenvalue is extracted by adaptive K-means++. The experiment uses median segmentation,K-means and adaptive K-means++ to extract eigenvalue,and compare them with the eigenvalue observed by human vision. Experiments show that the eigenvalue extracted by the adaptive K-means++ method are more accurate.
Keywords:harness connector;dominant color eigenvalue;adaptive K-means++;chromatic aberration
0 引 言
线束连接器是电子电路设备中不可或缺的一种重要器件,结构上包含两个部分,上部分是用于装线的胶壳,下部分是连接线。它的作用是在两个或者多个孤立不流通的电子电路之间搭设连通的桥梁,使电流流通,实现电子元器件的各项功能[1]。随着电子制造业的快速发展以及连接器需求量地不断增加,涉及的领域有汽车、电信与数据通信、航空航天、医疗设施以及军事领域等。由于全球连接器生产能力不断向中国偏移以及更多的国际连接器企业把生产基地转移到中国,中国市场成为全球连接器订单量增长最快的市场,因此对连接器品质的要求越来越严格[2]。线束连接器是由各种不同颜色的导线按照一定的顺序插入到对应的孔位,因此颜色特征是其最显著的特征。利用颜色特征识别不同的导线,是線序检测中常用的一种有效方法。为了防止由于人为因素或者环境因素导致线束颜色顺序排列错误而产生电表误接线、机器故障等情况,工作人员需要将不符合导线颜色排列规则的产品即不合格产品检测出来,不能在市场上售卖。
目前,线序检测大多采用人工目检的方式,这种方式会因为操作员的视觉疲劳或注意力不集中而导致漏检或检错,从而降低企业的生产效率和声誉进而导致企业订单流失。伴随着机器视觉的兴起以及在工业生产方面的广泛应用,通过机器视觉自动识别线束顺序是否正确,从而实现线束自动化检测。
1 研究架构
目前,国内关于对线束的外观检测(如颜色)方面的研究及发表的论文比较少,绝大多数的研究主要集中在对线束内部检测(如开路、短路、错接等方面)的研究,对已有线束检测和识别的文献进行了检索。文献[3]采用中值滤波去除采集图像的噪声,利用大津阈值法对图像进行阈值分割并利用Sobel算子检测边缘,最后通过计算线束每根导线表面像素点的平均值作为每根导线的颜色特征值。文献[4]对采集到的线束图像进行中值滤波,然后截取线束的检测区域进行二值化,接着分割导线并得到每根导线的轮廓,通过各轮廓位置获取对应原图像中图像块并计算颜色聚合向量特征。
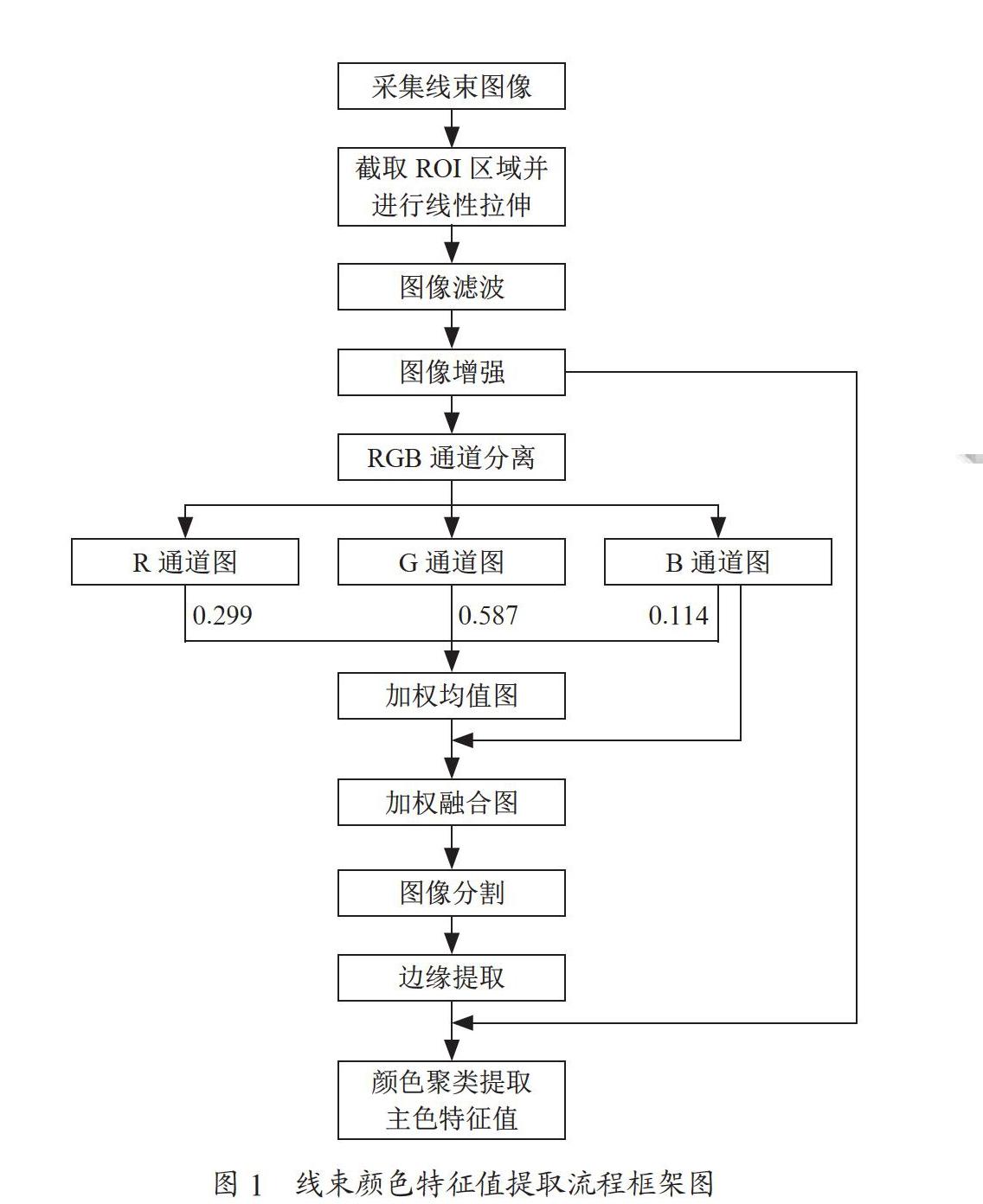
以上文献均为本文的研究提供了思路,由于线束导线表面的字符及高光会对线束颜色产生干扰,已有的提取主色特征值的方法不够准确。由此本文提出线束颜色特征值提取流程框架图,如图1所示。
第1步,利用工业相机采集双排线束图像;第2步,为避免导线交叉重叠,提取紧靠在胶壳孔位的下方区域作为图像的感兴趣区域进行处理,采用双线性插值法对其进行线性拉伸;第3步,通过双边滤波法进行去噪;第4步,利用对数变换法突出线束主体与背景的差别;第5步,通道分离,将R、G、B这3个子通道灰度图以0.299、0.587、0.114的加权系数进行算术运算得到加权均值灰度图;第6步,考虑到彩色图像灰度化会丢失部分颜色的信息,因此将B通道灰度图和加权均值灰度图以一定比例进行融合得到新的加权融合图;第7步,对图像中线束主体与背景进行自适应阈值分割;第8步,采用Canny算子提取图像边缘,根据各导线轮廓的位置获取增强图像对应的图像块。第9步,通过线宽选取聚类区域,利用自适应K-means++提取各部分的特征值。
2 线束图像预处理
2.1 线束图像滤波
在相机采集线束图像过程中,由于光照强度变化、机械平台抖动等原因会导致采集到的图像信息中含有一定程度的噪声,这种噪声会降低图像的像质,因此需要对其进行降噪操作,需要利用双边滤波法对图像进行降噪,其效果图如图2所示。双边滤波法的主要原理是结合图像的空间邻近度和像素值近似度对图像去噪,使得图像在滤波中同时考虑空间域信息和灰度相似性,实现去除噪声时还能保留图像的轮廓信息的优点[5]。
2.2 线束图像增强
为了强调线束图像目标的特征以及扩大图像中背景和目标间的差距,改善图像的质量和提高图像的视觉效果,需要对去噪后的图像进行增强操作,需要利用对数变换法对去噪后的图像进行增强,其效果图如图3所示。对数变换法的基本原理是通过将图像中范围分布较窄的低灰度值进行部分扩展,展示出低灰度部分更多的细节,并且将范围分布较宽的高灰度值进行部分压缩,从而达到增强图像中低灰度细节的目的[6]。
2.3 色彩空间转换
由色度学原理可知,彩色图像中的每个像素均可由红、绿、蓝三种颜色按照不同比例合成[7]。常见的彩色图像灰度化方法有分量法、最大值法、最小值法、平均值法和加权均值法等。其中分量法指的是取该像素点三分量中的任何一个分量作为该点的像素灰度值,而加权均值法是按照人眼对红色R通道、绿色G通道、蓝色B通道的重要性将各通道按照一定权重进行加权后取均值,把该加权均值作为灰度图像的灰度值。
彩色线束图像的R分量图、G分量图、B分量图分别如图4(a)、4(b)、4(c)所示,从图4(a)、图4(b)和图4(d)可以看出,从左到右依次按顺序第1根、第2根、第3根、第11根以及第12根导线在进行灰度转换之后灰度值偏大,在灰度图中表现为颜色偏亮,这导致与背景的差别较小,难以区分。考虑到下一步需要将图像中的每一根导线分割出来,单一的灰度转换方法存在很大的局限性,故将B分量图和加权均值图进行加权运算融合得到了一幅新的灰度图,如图4(e)所示。
2.4 线束图像背景分割
为了将线束图像中的每根导线从图像中分割出来,采用大津阈值法自动获取线束目标的最佳阈值。大津阈值法简称OTSU,又称最大类间方差法,该方法根据目标图像的灰度特性将图像分为目标和背景两个部分,并计算这两部分的方差。当目标和背景间灰度值的方差相差最大时,该阈值为最佳分割阈值,此时目标与背景间的差别最大,分割最有效[8]。经过大津阈值法分割的线束目标(黑色像素点)与背景(白色像素点),如图5所示。
2.5 线束图像边缘检测
边缘是图像中属性区域的分界,也是图像目标与背景间的像素灰度产生突变的区域。边缘检测的目的就是提取图像边缘轮廓信息并消除相关信息,从而减少分析的数据量。John Canny在1986年提出了阶梯型边缘检测算子即Canny算子,该算子具有信噪比好、定位精准以及最简的边缘响应的优点。该算子的基本思想是通过高阈值准确定位边缘片段以及低阈值跟踪连接边缘,高低阈值的有效配合极大地降低了将噪声误判为边缘的可能性。其基本步骤有:利用高斯滤波器平滑噪声、计算边缘梯度的强度和方向、由梯度方向对梯度幅值进行非极大值抑制、双阈值检测边缘以及边缘连接[9]。Canny算子边缘检测效果如图6所示。
3 主色特征值提取
3.1 K-means++概述
K-means是聚类算法中经典算法之一,该算法需要预先指定K个聚类数,随机選取K个初始聚类中心,以欧氏距离作为相似性指标,将各个样本划分到距离聚类中心最近的类中,通过不断迭代更新聚类中心[10]。K-means算法的不足之处在于需要预先确定聚类个数以及随机选取初始聚类中心,当初始聚类中心选取不恰当时,聚类算法容易陷入局部最优解。为了解决这个问题,Arthur提出了改进的聚类算法K-means++,该算法通过计算概率选取聚类中心,极大地改善了K-means聚类中心初始值不准确的问题[11]。
3.2 K-means++主色特征值提取方法
经过图像预处理操作后,我们可以提取到线束图像每根导线的轮廓。由于处理前后,图像的轮廓没有发生变化。增强图像不仅去除了噪声而且突出了线束每根导线的特征。根据各个导线轮廓的位置获取增强图像中对应的各个导线区域,为了减少聚类所用的时间,我们取图像上每根导线的部分区域进行聚类分析,如图7标注的矩形框所示。
矩形聚类区域的选取步骤:
(1)确定每根导线聚类区域的宽(设为ω):对Canny边缘检测后的图6,取第一行从左到右依次扫描,并将白色像素点的行号记录下来,此时每根导线的右边线行号与该左边线行号的差即为每根导线的宽度,简称线宽,以该线宽作为每根导线聚类区域的宽。
(2)确定每根导线聚类区域的高(设为h):由于处理前后各图像的大小不发生改变,取Canny边缘检测后图像宽的一半上下各取10个像素点总共20个像素点作为聚类区域的高。
图7(a)的红色矩形区域为每根导线的聚类区域,其中每个聚类区域共有N个像素点,其中N为聚类区域的宽(ω)和高(h)的乘积,N个像素点组成的数据集X={xi|xi∈R3,i=1,2,…,N},每个数据点xi是由3个表征其特征的R、G、B数据组成的向量。例如(255,255,255)、(0,0,0)等。
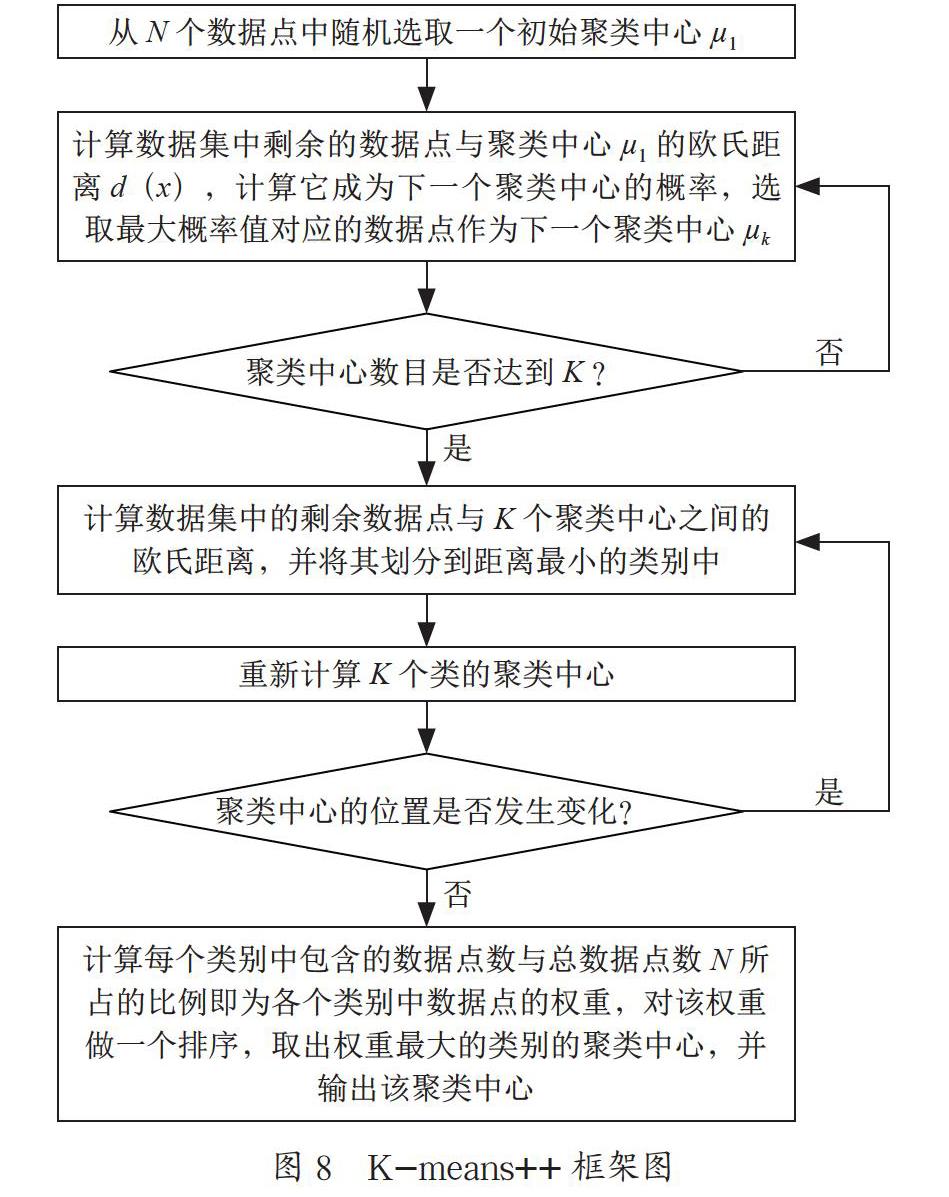
K-means++的聚类目标是将数据集X中的N个数据点划分到K类组成的数据集C={ck|k=1,2,…,K},其中ck类的类中心为μk,一个被划分到ck类的数据点xi到类中心μk的欧氏距离为:
disted(xi,μk)=||xi-μk||2,xi∈ck (1)
所有被劃分到ck类的数据点xi到该类的类中心μk的欧氏距离和为:
(2)
求得K类中的数据点到其对应类中心的欧氏距离总和,即:
(3)
聚类目标就是使J(C)的值最小。
算法框架图如图8所示。
3.3 自适应K-means++
通常情况下,K-means中聚类数K值的选取是根据先验知识估计的一个值,K值选择是否合适决定着聚类效果的好坏。针对这种情况,通过聚类评估指标轮廓系数[12]来搜索样本的最佳聚类,实现自动确定最佳聚类数K。求取平均轮廓系数的具体计算步骤为:
(1)对于数据集X里的数据点xi,假设xi被聚类到类A,计算xi与类A内所有其他数据点距离的平均值,记作a(i),用于度量类内的凝聚度;
(2)选取非类A之外的另一个类B,计算xi与类B中所有数据点的平均距离。依次遍历所有其他非A类的类,从而找到最近的平均距离并记作b(i),用于度量类之间的分离度;
(3)对于数据点xi,计算其轮廓系数:
(4)计算数据集X中所有数据点的轮廓系数,并求出其平均轮廓系数。平均轮廓系数(i)的取值范围为[-1,1],在此范围内,类内数据点之间的距离越小,类间数据点间的距离越大,平均轮廓系数越大,表明聚类效果越好。因此平均轮廓系数最大的聚类数目K就是最佳的聚类数。
当聚类数目K为1时,说明图像像素点呈现均匀分布的情况,无明显特征差异,通常最小聚类数为2。考虑到聚类区域会受到表面高光、表面字符以及背面线束遮挡的干扰,将导致提取线束区域的主色特征不准确,因此设置最大聚类数目为4。自适应K-means++聚类流程图如图9所示。
4 实验结果与分析
彩色线束图像的颜色特征提取的过程主要依赖硬件和软件两部分配合完成。硬件部分包括USB接口的高性能工业CCD相机、变焦镜头、LED条形光源以及普通计算机。软件部分包括使用Visual Studio 2015工具作为系统环境的开发平台和OpenCV3.1.0的开源计算机视觉库来实现线束图像处理。
一般来说,相机采集的彩色图像依赖于RGB色彩空间,但RGB空间的颜色分布不均匀,获取到的RGB值很难确切地表示该值代表的颜色认知属性。而CIELAB空间是色彩均匀的空间,它与人眼视觉感知一致,通过将RGB色彩空间获取的RGB坐标值转换为相应的XYZ和LAB坐标值,并利用CIELAB色差公式计算该实验方法和通过人眼视觉获取到的线束图像主体颜色上的差异即色差ΔE[13],并通过与中位切分法、K-means及自适应K-means++分别提取主颜色特征值和计算色差值。结果如表1所示。
总体来看,表1中中位切分法提取的颜色特征值与人眼视觉观察到的特征值之间的颜色差异较大,说明该算法提取的颜色特征值不准确;而自适应K-means++相对色差较小,说明该算法提取的颜色特征值较为准确。
5 结 论
颜色识别是线序检测中的重要特征,为了准确地提取每根导线的主色特征值,提出了自适应K-means++提取主色的方法。通过相机获取双排线束图像,选取图像感兴趣区域进行处理并对其进行线性拉伸;利用双边滤波去噪、对数变换增强后进行通道分离,分别获取到R、G、B三通道的灰度图;利用加权和融合的方式得到新的灰度图;并利用大津阈值法分离线束主体与背景;采用Canny算子提取线束图像的边缘,即得到每根导线的轮廓,通过线宽选取各轮廓的位置对应到增强图像的图像块。最后利用自适应K-means++提取区域的主色特征值。最后实验通过中位切分法、K-means以及自适应K-means++提取的颜色特征值和人眼视觉获取的特征值进行色差对比,结果表明自适应K-means++算法提取的图像特征值较为准确。
参考文献:
[1] 范冬冬.基于机器视觉的双排线束检测仪的研究与设计 [D].马鞍山:安徽工业大学,2019.
[2] 吴晖辉,曾宪荣,赖燕君,等.基于机器视觉的线束连接器字符检测 [J].测试技术学报,2018,32(2):174-179.
[3] SHI G M,JIAN W. Wiring harness assembly detection system based on image processing technology [C]//2011 International Conference on Electronics,Communications and Control (ICECC).Ningbo:IEEE,2011:2397-2400.
[4] 吴宗胜,薛茹.基于颜色聚合向量的线序检测方法 [J].计算机测量与控制,2019,27(6):182-185.
[5] 石坤泉,魏文国.采用双边滤波的冷轧铝板表面缺陷图像去噪方法的研究 [J].表面技术,2018,47(9):317-323.
[6] 丰远远,高贤君,杨元维,等.改进对数变换联合局部增强的高分遥感影像阴影自动补偿方法 [J].激光与光电子学进展,2020,57(20):67-75.
[7] 刘美,薛新松,刘广文,等.对比度增强的彩色图像灰度化算法 [J].長春理工大学学报(自然科学版),2018,41(5):70-74.
[8] 陈雪鑫,卜庆凯.基于改进的最大类间方差法的水果图像识别研究 [J].青岛大学学报(工程技术版),2019,34(2):33-38+62.
[9] 郑健,王继,宋世铭.Canny双阈值算子在边缘提取中的优势 [J].地理空间信息,2019,17(11):128-130+12.
[10] CHEN G L,WANG G W,JU J,et al. Research on the Influence of Kmeans Cluster Preprocessing on Adversarial Images [C]//Proceedings of the 2019 7th International Conference on Information Technology:IoT and Smart City.New York:Association for Computing Machinery,2019:248–252.
[11] KUBO Y,NII M,MUTO T,et al. Artificial humeral head modeling using Kmeans++ clustering and PCA [C]//2020 IEEE 2nd Global Conference on Life Sciences and Technologies (LifeTech).Kyoto:IEEE,2020:5-7.
[12] 朱连江,马炳先,赵学泉.基于轮廓系数的聚类有效性分析 [J].计算机应用,2010,30(S2):139-141+198.
[13] 范鹏飞,孙俊.基于机器视觉的色差检测算法 [J].传感器与微系统,2016,35(10):120-122+126.
作者简介:惠婉玉(1996—),女,汉族,安徽宿州人,硕士研究生在读,研究方向:机器视觉与图像处理;吴玉秀(1982—),男,汉族,河南安阳人,讲师,博士,研究方向:机器视觉与图像检测;张文忠(1997—),男,汉族,安徽桐城人,硕士研究生在读,研究方向:机器人调度。
猜你喜欢
民族文汇(2022年44期)2022-07-09
科技视界(2020年4期)2020-04-26
科技与创新(2016年23期)2017-03-30
纺织导报(2017年2期)2017-03-10
电脑知识与技术(2016年23期)2016-11-02
科技视界(2016年4期)2016-02-22
计算机时代(2016年2期)2016-02-19
汽车工程学报(2015年1期)2015-04-13
山东农业科学(2014年3期)2014-08-20
档案管理(2014年1期)2014-01-14
