教学机器人综合实验平台设计与研发
2021-06-28 06:59王东霞赵艺兵温秀兰崔伟祥渠慎林
南京信息工程大学学报 2021年3期
王东霞 赵艺兵 温秀兰 崔伟祥 渠慎林
1 南京工程学院 自动化学院,南京,211167 2 南京工程学院 工业中心/创新创业学院,南京,211167
0 引言
近年来,工业机器人在制造业得到了广泛应用,机器人技术人才需求出现了井喷式增长.“机器人工程”专业是顺应国家建设需求和国际发展趋势而设立的一个新兴专业,2015年,由教育部批准成为本科新专业,列入招生计划.该专业是以控制科学与工程、机械工程、计算机科学与技术等学科中涉及的机器人科学技术问题为研究对象,综合应用自然科学、工程技术、社会科学、人文科学等相关学科的理论、方法和技术,具有融合掌握多学科基础理论的专业优势.为满足机器人工程新专业建设需要,亟需教学实验平台支撑.教学机器人作为高新技术的载体,在实践教学中的地位越来越受到重视,近两年不断有相关研究成果报道.为解决传统自平衡平台响应速度慢、控制精度低的问题,文献[1]提出了基于EtherCAT总线的六自由度自平衡平台设计方法,利用自抗扰控制算法对平台进行精确控制,具有低延时和较高的抗干扰能力等优点.为了解决实验教学过程中机器人结构复杂、成本高、编程效率低等问题,文献[2]设计了一种基于上位机控制的拖动示教教学机器人系统,该系统在设置好相关参数后只需根据上位机操作界面提示拖动机械臂运动就可以对机器人进行快速编程;文献[3]设计了一种末端有效载荷为15 kg的高精度四轴自动搬运机器人实验平台,针对工业机器人控制系统封闭和现有实验教学设备功能有限的现状,文献[4]设计了一款机器人手臂开放式控制实验平台,基于该平台能够开展机器人关节运动控制、手臂协调控制等实验.
计算机技术和图像处理技术的飞快发展,使得视觉引导技术和机器人技术结合成为了可能.将视觉系统引入教学机器人控制系统中将大大提高教学机器人智能化水平,可以满足多种层次人才培养的需求,因此视觉技术与机器人技术结合成为近年来科研[5-9]与教学热点.文献[10]将双目视觉、搬运机器人和工业无线网等技术相结合,设计开发了一款智能搬运机器人实验平台;文献[11]设计了一套基于管道巡检机器人的视觉系统实验教学平台.为解决复杂地形造成的各种不确定性使得机器人的环境感知能力受到极大限制问题,文献[12]设计了一款俯视相机辅助的地面机器人导航系统综合实验平台.
上述机器人实验教学平台多是针对特定应用对象或完成特定功能而研发的.考虑到机器人工程专业具有很强的前沿性、综合性和实践性,本文设计了一款集机、电、控、图像处理于一体的开放式教学机
器人综合实验平台,将机器人机械结构设计、运动学分析、驱动控制、轨迹规划算法、软件设计、图像处理等专业核心知识与技术进行有机融合,有助于学生更好地掌握专业理论知识和实践技能.
1 系统总体设计
本教学机器人综合实验平台组成如图1所示,由机器人本体、控制台、视觉硬件组成,其中机器人本体包括机械本体、减速机、伺服电机,控制台包括PC机、PCI1040运动控制卡、信号转接板、伺服驱动器及通信和接口电路组成,视觉硬件系统由工业相机、镜头、光源等组成.
2 机械本体结构
机械本体是机器人实现各种动作的机械机构,由刚性连杆通过6个旋转关节连接组成,采用模块化设计思想,设计了该教学机器人腰部、大臂、小臂、手腕.此外,机器人本体配有便于安装的基础底座,腰部机构与基座固定连接,腰部支撑大臂,大臂支撑小臂,小臂支撑手腕,其三维结构如图2所示.所有关节都是旋转关节,几何结构满足Pieper准则.通过建立机器人连杆坐标系,由机器人本体各关节和臂长的设计参数,得到该机器人Denavit-Hartenberg (DH)模型参数,即连杆长度ai、连杆偏距di、连杆扭角αi、零位状态关节角θ0i,i=1,2,…,6.
3 控制系统设计
为了解决现有机器人其机械结构与控制器封闭、控制算法固化,以及学生对机器人结构和工作原理理解不透等问题,本教学机器人控制系统设计为开放式结构,硬件结构如图3所示,由工业PC机、阿尔泰PCI1040运动控制卡、信号转接板、交流伺服驱动系统、通信模块转换器及辅助电气设备等组成.

图3 控制系统结构Fig.3 Control system structure
采用开放式实验平台,把电气部分全部安装在网孔板上,控制部分和本体之间采用方形连接器进行电气连接,对控制系统中的运动控制卡、伺服系统、信号转换板等部件进行接线,搭建好的机器人实验平台如图4所示.

图4 机器人实验平台Fig.4 The robot experimental platform
4 软件系统及实验项目设计
4.1 软件系统
基于软件系统的多任务处理、多线程编程和通用性等要求,开发平台选用操作系统为Windows的工业PC机,通过Visual C++开发工具对其进行设计编程,由机械结构、运动学分析、运动控制及视觉引导4大实验模块组成.
4.2 开设的实验项目
基于本综合实验平台能够开设的实验项目有串联机器人机械结构实验、机器人运动学分析实验、运动控制实验、图像处理实验及基于视觉引导的物体识别及抓取综合实验.
4.2.1 机械结构实验
机械结构实验包括机器人各关节装配及实物认识实验、机器人关节RV减速器和谐波减速器的工作原理及安装、机器人关节伺服电机的安装实验以及机器人本体安装实验.图5为机器人结构及大臂实物演示实验.
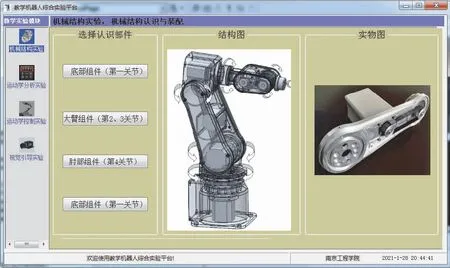
图5 机器人结构及大臂实物演示Fig.5 Demonstration of robot structure and arm
4.2.2 机器人运动学分析实验
机器人运动学分析实验平台建立了机器人DH几何模型,根据DH模型可以获得机器人连杆相邻坐标系之间的变换关系[13],完成机器人正运动学和逆运动学分析实验.其中正运动学实验需要输入机器人6个关节转角,点击“正解”按钮,程序将计算在基坐标系下机器人末端的位置和姿态.在逆运动学分析实验中,需要输入基坐标系下机器人末端的位置和姿态值,点击“反解”按钮,程序会自动计算关节角,给出8组解如图6所示.在实际应用中,根据最小能耗或最短行程从8组关节角中选择一组关节角.该界面还提供了“恢复初始数据”按钮,用于对上一个目标点反解数据的回溯.

图6 机器人逆运动学分析实验Fig.6 Robot inverse kinematics analysis experiment
4.2.3 机器人运动控制实验
机器人运动控制模块涉及的实验教学内容有伺服驱动器安装与电气调试、机器人电气主电路和控制电路的安装与调试、伺服驱动器的参数设置与检测、机器人关节参数设置与检测、机器人关节运动力矩检测与分析、辅助气动部件的安装与调试、机器人各关节调试运动控制.通过调用PCI1040-StartLVDVCHV()等函数来设置单轴运动的步长、速度以及加速度等参数以调试机器人6个关节的性能,控制每个关节的单步正反向运动,通过调用机器人轨迹规划相关插补算法实现轨迹规划.图7为伺服系统的组成电路,图8为主电路和控制电路(以第1关节为例).
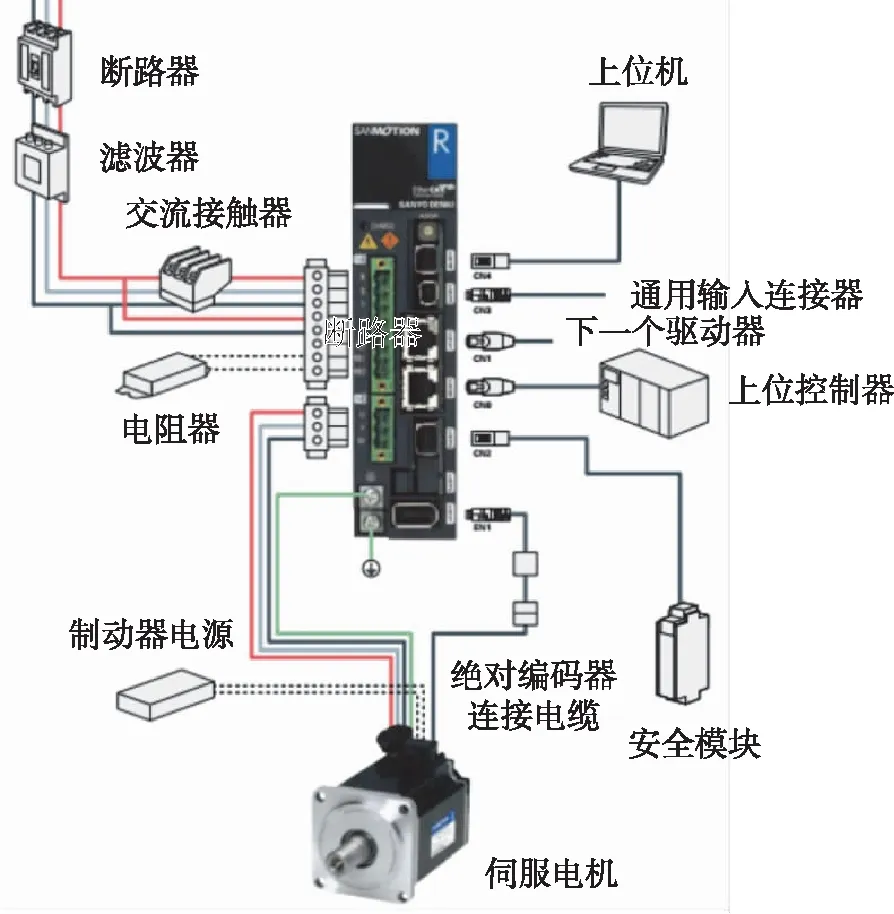
图7 伺服驱动器的组成电路Fig.7 Composition circuit of servo system
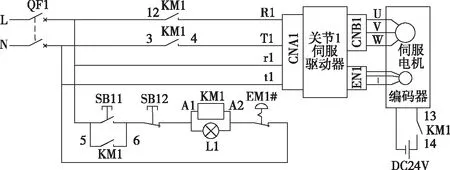
图8 主电路和控制电路Fig.8 Schematic diagram of main circuit and control circuit
4.2.4 视觉引导实验
视觉引导实验模块界面如图9所示,学生可以根据实验界面选择打开摄像头、摄像头标定、图像预处理、模板匹配等实验.通过摄像头标定、图像处理可以识别目标物体并得到其中心坐标,将得到的坐标反馈给机器人控制系统,可以引导机器人准确、快速地抓取到目标物体,如图10所示.该模块建议列为创新实验,学生可以根据自己兴趣及基础编写不同的滤波、差值等图像处理算法程序,尝试对不同形状、不同颜色物体进行识别与抓取.

图9 视觉引导实验界面Fig.9 Visual guidance experiment interface

图10 物体识别与抓取实验Fig.10 Object recognition and grasping experiment
5 结论
针对机器人工程专业具有很强的前沿性、综合性和实践性,本文设计完成了一款教学机器人综合实验平台,包括机械本体结构设计、控制系统硬件设计、软件系统及实验项目设计,经机器人原型系统设计制造及实验研究,证实了使用该教学机器人综合实验平台能够完成机械结构演示实验、运动学分析、驱动控制、轨迹规划、图像处理、视觉引导物体识别与抓取等实验,开放的控制系统可操作性强,有助于提升学生的工程实践与创新能力.
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
齐鲁艺苑(2022年1期)2022-04-19
家庭医药(2022年1期)2022-01-18
哈哈画报(2021年10期)2021-02-28
文萃报·周五版(2021年51期)2021-01-04
冰雪运动(2020年5期)2020-03-29
爱你(2019年33期)2019-11-14
冰雪运动(2016年5期)2016-04-16
新高考·高一物理(2016年1期)2016-03-05
图书与情报(2013年1期)2013-11-16