
一种弹载导引头单脉冲跟踪仿真及测试系统
2021-06-27 03:26李宝烨张永鹏
电子设计工程 2021年12期
李宝烨,张永鹏
(中国电子科技集团公司第38 研究所,安徽合肥 230088)
导弹上装载复合导引头的目的是引导导弹攻击重要目标,弹体上装备的SAR 成像导引头相比光学成像具有全天候、全天时工作的优点;在导弹工作末段可利用单脉冲技术通过比较两个或多个天线波束的回波信号获取目标角度信息,完成目标角跟踪[1-4]。
由于弹载导引头搭载平台的特殊性,真实的目标点迹数据只能通过挂飞获得,而挂飞成本较高,通过挂飞难以提供足够的数据和边界值对单脉冲跟踪算法的工作流程及效能进行验证。基于此,设计了一种可全流程闭环的单脉冲跟踪仿真及测试系统,可通过仿真模拟导弹运动过程并与数据处理模块对接,实现单脉冲跟踪算法的测试验证。
1 系统架构
系统共包括两部分:弹载导引头目标仿真模拟系统(以下简称目标模拟系统)和单脉冲数据处理系统(以下简称数据处理系统)。
其中,目标模拟系统包括动力学模块、控制算法模块和数据交互模块,完成目标点迹数据生成和输出;数据处理系统包括数据处理模块和显示与控制模块,实现目标搜索、目标跟踪、流程控制和状态监控的功能。系统架构如图1 所示。
图1 系统架构组成
在导弹飞行过程中,弹体的运行状态按照刚体进行动力学建模,在引力、气动力、控制力等的力矩作用下,得到刚体平动和转动状态的描述。通过配置文件设置弹道发射点坐标、目标点个数、目标点坐标、导弹各级发送机推力等参数,给出飞行过程的可行弹道。
图1 中,目标模拟系统和数据处理系统之间使用Socket 通信。数据交互模块将动力学模块给出的导弹状态进行坐标系转换,得到地球固联坐标系和目标东天南坐标系下的状态,组成目标点迹数据发送给数据处理系统,经搜索和跟踪后将结果先送至目标模拟系统实现闭环仿真,再经显示与控制模块完成跟踪结果监视。
2 系统设计
2.1 系统流程设计
目标模拟系统根据导弹与目标的相对运动关系计算弹目距离。弹目距离小于30 km 时,控制搜索波束;小于20 km 时控制跟踪波束。工作过程中以20 ms 为周期(模拟弹载导引头实际信息送出频率)输出目标点迹数据。
在数据处理系统工作过程中,根据搜索或跟踪波束的不同,进行点迹预处理、点迹融合处理或点航关联、航迹滤波处理和航迹管理与输出[5-6]。系统流程设计如图2 所示。
图2 中,根据用户指令和参数,控制系统进入相应的工作流程,完成单脉冲搜索和跟踪处理,实现对单脉冲跟踪的仿真测试。
图2 系统设计流程图
目标模拟系统和数据处理系统使用“目标点迹数据”、“单脉冲搜索结果”和“单脉冲跟踪结果”协议进行数据交互,协议主要内容如表1 所示。
表1 信息交互协议
若数据处理系统上报单脉冲搜索、跟踪结果有效,目标模拟系统根据波束角度和目标位置进行闭环控制,若无效,则返回到单脉冲最初开始的凝视位置。
2.2 数据处理方法
数据处理方法包含单脉冲搜索处理和单脉冲跟踪处理两部分。
二元矩图(Binary Moment Diagram,BMD)[12]是具有实数、有理数或者整数值函数的图形表示,常被用来进行算术电路的验证.在使用BMD表示概率表达式时,使用终端结点表示表达式系数,非终端结点表示变量.
2.2.1 单脉冲搜索处理
目标模拟系统在弹目距离大于20 km 且小于30 km 时,产生搜索点迹数据,后开始单脉冲搜索处理,其步骤可总结如下:
1)点迹预处理:根据弹体的位置、姿态、弹目距离及波束角信息计算出当前帧所有目标Pn(Xn、Yn、Zn),n=1~10;
2)点迹融合:根据当前帧最大测距dMaxRng和测角精度AccSrh利用式(1)计算空间位置门限:

若检测目标Pm(m=2~10)与Pn的空间距离小于融合门限,即:

则认为Pn与Pm为同一目标,将Pm删除。
3)结果排序:收到最后一帧搜索点迹后,将点迹融合后的目标按信号幅度从大到小排序后,打包为“单脉冲搜索结果”,上报给目标模拟系统[7]。单脉冲搜索处理过程如图3 所示。

图3 单脉冲搜索处理过程
在单脉冲跟踪过程中,由于受目标区域可能存在的多目标、地杂波或海杂波等影响,在单脉冲目标检测过程中可能同时检测出多个目标点信息(包含真实目标点和杂点),检测结果无法直接用于目标跟踪[8],因此,如何选择准确的目标是保证单脉冲稳定跟踪的关键问题。通过对目标模拟系统输出的目标点信息进行数据处理,针对特定目标采用“航迹”概念,通过对目标进行航迹的生成、关联、管理等,选择最优目标点输出,以提高单脉冲跟踪精度,实现精准打击目标[9-11]。单脉冲跟踪处理流程如图4 所示。

图4 单脉冲跟踪处理流程
1)点迹预处理:与单脉冲搜索点迹预处理过程相同,获取当前帧所有检测目标的三维坐标位置。
2)二维动态关联:针对单脉冲阶段特征,根据空间距离SDis(表征目标位置与航迹滤波位置之间的距离)和斜距差RDis(表征目标测距与航迹中最新关联点的预测斜距的差值)作相关决策,且两因素在关联过程中所占权重不同,需做动态关联处理。点迹与航迹关联步骤可总结如下:
①关联门限计算:计算的门限包括空间位置门限SpaceThrd和测距门限DisThrd,其中空间位置门限计算方法如式(1),测距门限计算方法如式(3):

当SDis小于SpaceThrd且RDis小于DisThrd时,认为该点迹与航迹可关联。
②隶属度计算:隶属函数是用于表征模糊集合的数学工具,为了描述元素x对模糊集合的隶属关系,由于这种关系的不分明性,它将用从区间[0,1]中所取的数值来描述,表示元素属于某模糊集合的“真实程度”。这里使用梯形偏小型隶属函数进行精确相关,隶属函数如下式所示:
其中,b为上限,a为下限。在点航关联过程中,确定空间距离和斜距差的上下限,即可获得空间距离SDis隶属度us和斜距差RDis隶属度uR。
③关联权重计算:考虑在真实飞行过程中弹目距离较大时,在测角精度的影响下,检测的分辨率较小,空间位置上不易区分;且此时弹目矢量的倾角较小,在测距上更易区分目标。随着弹目距离的减小以及弹体姿态的变化,在测角精度一定的情况下,随着弹目距离的减小,对目标的分辨率在提高,因此在空间位置上更易区分目标;而在斜距上,因弹目倾角变大,因此区分较为困难。
基于以上特征,空间距离权值Sw随弹目距离减小而动态增大,斜距关联度权重Rw随弹目距离减小而动态减小。如下式所示:

④点航隶属度计算:目标点迹与航迹间的隶属度为Ux,隶属因子包括空间距离SDis和斜距差RDis,隶属度分别为us和uR,相互独立。其中us的权重为Sw,uR的权重为Rw,则点航隶属度计算公式如下:

3)“一对一”最优迭代匹配:通过对点迹与不同航迹间隶属度的迭代匹配处理,最终将m(1~10)个点迹目标与n个航迹“一对一”关联。步骤可总结如下:
①计算目标1 与所有航迹的隶属度(U11,U12,U13,…,U1n),获取最大隶属度为U12,表明目标1 与航迹2 为最优关联。
②计算目标2 与所有航迹的隶属度(U21,U22,U23,…,U2n)。若最大隶属度为U22,且此时U22大于U12,表明目标2 较目标1 与航迹2 的隶属度更优,目标2 与航迹2 为最优关联。对于被替换的目标1,重新对隶属度(U11,U13,U14,…,U1n)取最大值U14,表明目标1 与航迹4 为最优关联。
③依次对后续的目标3、目标4、…、目标m进行迭代处理。
4)航迹加权滤波:航迹在经过最优关联后,目标点迹匹配到了最佳的航迹,对航迹中目标点位置进行滤波处理,避免存在较大的状态变化,以维持目标航迹的稳定。该文采用加权滤波法,即对采样序列中的数据通过序列加权并求和后,再除权重序列累加和,如下式所示:

3 系统验证
为了验证弹载导引头单脉冲跟踪仿真及测试系统的可行性,在配置文件中设置导弹发射点经、纬度分别为20°和-10°,该文对同一目标设置不同运动速度验证该系统,目标信息如表2 所示。
表2 目标信息
在显示与控制模块,可监视目标位置。搜索到的目标位置使用“+”表示,跟踪过程中生成的稳定航迹中的目标位置用“·”表示,若稳定跟踪,则可显示该航迹编号。3 组跟踪结果如图5~7 所示。
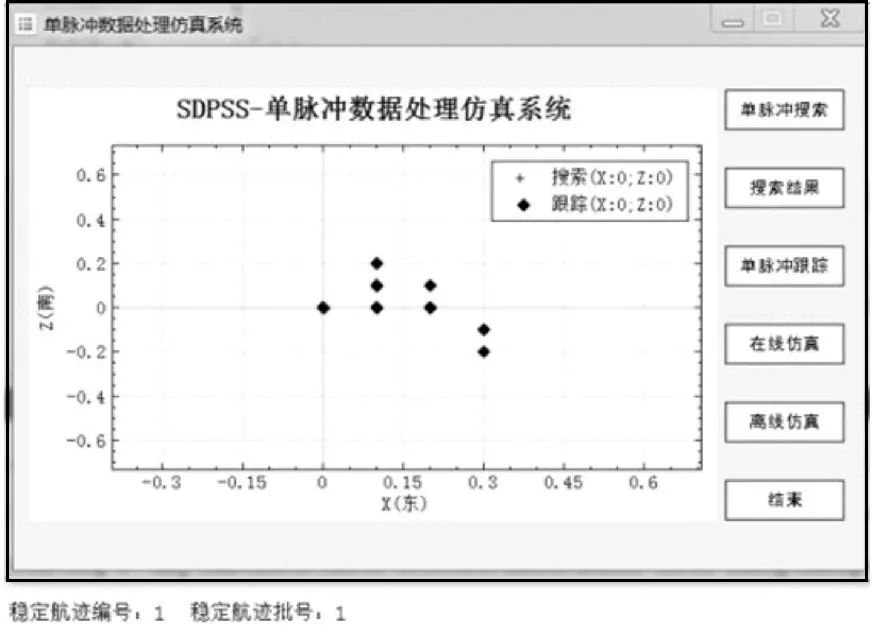
图5 静目标1跟踪结果

图6 动目标2跟踪结果
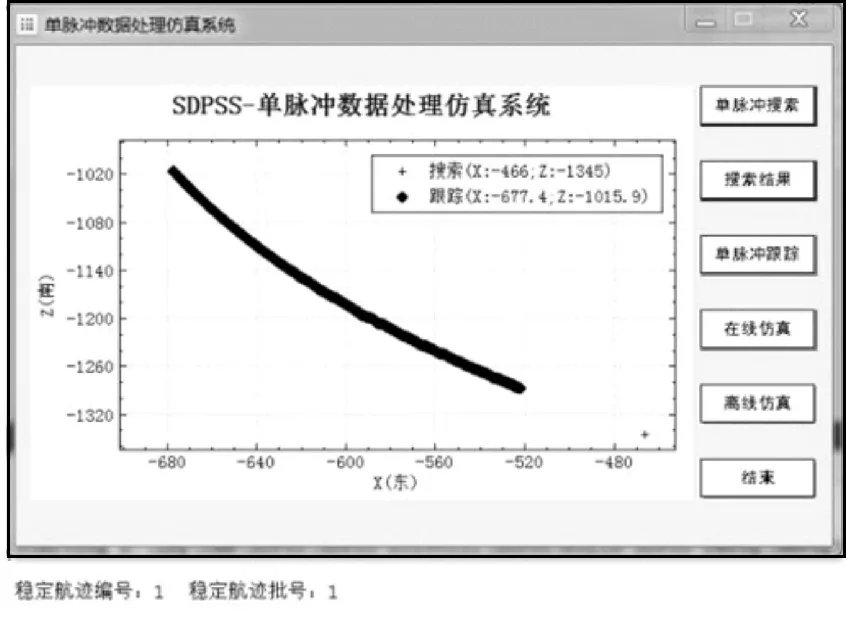
图7 动目标3跟踪结果
图5 中,跟踪过程中滤波后的目标位置与搜索后的目标位置(X∶0,Z∶0)最多存在0.33 m 的误差,可稳定跟踪,搜索结果点被跟踪点覆盖。
图6、7 中目标以固定速度运动,可以看出跟踪过程中滤波后的目标位置是稳定且连续的。综上,3 组目标经数据处理后,均可生成稳定航迹,达到稳定跟踪的目的。
4 结束语
文中设计了一种弹载导引头单脉冲跟踪仿真及测试系统,可实现目标模拟、数据处理、显示与控制等功能。试验表明,该系统能够模拟导弹运动数据,产生单脉冲点迹数据,完成单脉冲跟踪地面测试。
猜你喜欢
舰船电子工程(2021年4期)2021-05-25
北京航空航天大学学报(2020年3期)2021-01-14
数学物理学报(2018年4期)2018-09-14
电子制作(2018年1期)2018-04-04
兵器装备工程学报(2017年4期)2017-04-28
电子制作(2017年23期)2017-02-02
制导与引信(2016年3期)2016-03-20
焊接(2015年1期)2015-07-18
制导与引信(2015年3期)2015-04-20
弹道学报(2014年1期)2014-12-26
