典型通用机枪枪口振动响应非接触测试及分析∗
2021-06-26 11:18:42刘恒沙王亚平
振动、测试与诊断 2021年3期
刘恒沙,王亚平,徐 诚
(南京理工大学机械工程学院 南京,210094)
引言
现代轻量化机枪的设计要满足动态稳定性要求,即要求机枪连发过程中每一发射击时枪口保持射角的基本一致,因此对枪口振动动态响应的测试成为一项重要的测试。枪口振动响应的测试存在以下难点:射击过程伴随着烟火与冲击波会干扰传感器,传感器本身的质量会影响枪口响应[1‐4]。因此,需要非接触法来测量。高速摄影测量方法是一种优秀的非接触测量方法,在武器测试中得到越来越多的应用。
高速摄影很早就在物体运动测量中得到广泛应用。陈良一等[5]介绍了高速摄影仪的原理、发展以及在一些领域中的应用,包括了高速摄影仪的图像检测装置、判读方法和数据处理技术。盛德兵等[6]介绍了高速摄影运动分析系统的组成及其特点,分析了系统测量误差的主要来源,并针对原因提出了减小误差的方法和措施。宋宏勋等[7]指出了采用高速摄影进行立体测量的基础理论是直接线性变换关系式。谢兰生等[8]回顾了光学技术在三维位移测量中的应用,提出了一种利用高速摄影技术准确测量三维位移的新方法。贾超广等[9]提出了一种可实现高同步精度的双相机立体摄影测量系统的设计方案。高速摄影在兵器领域中也有应用。刘华宁等[10]通过对某14.5 枪械发射破片过程的测试,详细阐述了高速摄影测试系统组建和调试过程,讨论了参数设置的依据和要点,描述了用像素点法和等比例法进行结果处理的方法。李良威等[11]介绍了用高速摄影测量弹丸破片速度的几种方法,并列出了拍摄所用参数。焦志刚等[12]利用高速摄影测量弹丸脱靶量,并用两点法测得破片速度。汤雪志等[13]利用高速摄影测量了弹丸飞行速度,对测速方法中可能产生的误差进行了简要分析,并提出了解决措施。另外,关于机枪振动对射击精度的影响已有较多的研究[14‐16],但是较少见到高速摄影在机枪枪口响应测试中应用的文献。
笔者采用高速摄影测量方法对典型机枪连发过程枪口振动响应进行测量,提出了一种单机三维振动参数测量方法,得到枪口振动响应的位移、速度、加速度曲线,并利用弹丸出膛口时射角计算射弹散布并与实验射弹散布对比,对该测试方法的准确性进行了验证。
1 基于高速摄影的测试方法
笔者采用高速摄影测量运动参数的方法测量了某机枪枪口三维响应。由于测量三维运动需要两台高速摄影仪从不同方向进行拍摄,带来了设备使用数量较多和布置困难等问题,本研究提出了一种单台相机二方向测试方法,并分析了该方法中拍摄得到数据和真实数据的转换公式。
1.1 基于高速摄影的运动参数测量方法
高速摄影是以极高的拍摄频率将高速的过程拍摄下来,以适合的速度进行播放或处理的一种技术手段。它将光学物理量记录下来,通过图像识别和处理得到如位移等其他物理量,可以帮助人们研究常规手段难以研究的高速、超高速现象。其优点是数据直观、可视、便于回放观察,采用非接触量较为安全和简单易行,可以同时测量多个运动参数,也可以多台相机同步测量,且具有很强的抗干扰能力等。
利用高速摄影测量运动参数的原理如下:高速摄影机将t时刻测量对象的图像记录下来,对于运动平面保持不变的物体,通过同幅图像中已知长度标尺的尺寸,计算出该图像中每个像素点的尺寸,再以此计算出要测量物体的尺寸;将t+Δt时刻的图像记录下来,对比物体上某点在两幅图像中位置的差距,得到物体上该点的位移,通过插值计算出Δt时间内的平均速度。由于Δt时间极短,可以认为求得的平均速度就是该时刻物体上该点的速度。用同样的方法,可以近似取得该时刻物体上该点的加速度。对于运动面变化的物体,则可以让标尺和物体进行同步运动,在每一幅图像中都用标尺计算该图像的像素点尺寸。
1.2 单机二方向测试方法
单台相机只能拍摄到二维图像,为了测量物体的三维运动,通常需要用两台相机从不同方向拍摄。当两台相机的拍摄轴线相互垂直时,最容易通过二维运动解算出物体的三维运动。但是两台相机同步拍摄存在机位布置复杂、拍摄可能不同步等问题,故笔者提出一种利用平面镜的单机二方向同步测试方法。
1.2.1 单机二方向测试方法原理
单机二方向测试方法的原理如图1 所示。由图1 可知,物体的y方向运动所在平面与相机轴线垂直,所以可以直接拍摄;z方向运动与相机拍摄轴线平行,所以无法直接拍摄。因此,布置一块平面镜,将物体的z方向运动转换为镜像物体的镜像z方向运动,通过调整平面镜的角度,可以使镜像z方向运动所在平面与相机拍摄轴线垂直,变成可以直接拍摄,由此可以得到待测物体两个方向的运动,建立物体的三维运动,避免了使用多台相机导致的费用及设备布局困难问题。
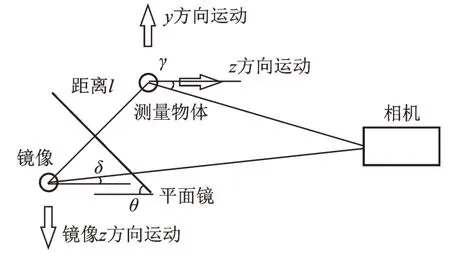
图1 单机二方向测试方法原理图Fig.1 Principle diagram of single-machine two-direction test method
在时间同步性上,物体运动和镜像运动的时间差来自于光路长度的差值。由于光路长度的差值很小,可以忽略不计,可认为物体运动与镜像运动是高度同步的,避免了使用多台相机导致的时间不同步。
1.2.2 单机二方向测试方法的数据转换公式
拍摄得到的物体z方向运动并非是物体真实的z方向运动,其偏差的第1 个来源是角度偏差导致物体和镜像物体的运动所在平面与相机拍摄轴线不完全垂直。
物体和镜像物体的运动所在平面与相机拍摄轴线存在如图1 所示的小角度γ和δ,这是相机本身带来的球面误差。当相机距离拍摄物体足够远的时候,γ和δ角度足够小,带来的影响可以忽略不计。因此,此处只讨论平面镜摆放角度θ所带来的误差。
当θ=45°的时候,物体的z方向运动平面与镜像z方向运动平面刚好垂直;当θ≠45°时,两个运动平面之间的夹角为2θ;镜像z方向运动平面与相机拍摄轴线的夹角为2θ-90°。因此,拍摄得到的镜像z方向位移量Δx'和实际的镜像z方向位移量Δx之间的关系为

偏差的第2 个来源是物体y方向所在平面和镜像z方向运动所在平面到相机的垂直距离不同而带来的近大远小效应,如图2 所示。
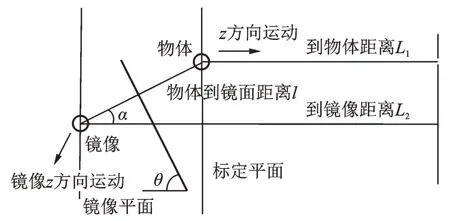
图2 误差第2 个来源示意Fig.2 The second source of error
假定镜像物体的镜像z方向位移为Δx,镜像z方向运动在镜像平面(垂直于拍摄轴线)的投影为Δx'。另假设投影Δx'转换到物体所在标定平面上后的投影为Δx'',标定平面到相机的距离为L1,镜像平面到相机的距离为L2,则由相似三角形原理可知

假设物体到镜面的距离为l,则

其中:α=90°-θ。
综上,得到物体镜像z方向实际的位移Δx和拍摄得到的镜像z方向位移的关系为

将拍摄得到的镜像z方向位移,通过式(4)处理,就可以消除偏差,得到物体实际的z方向位移。
1.3 实施方案
1.3.1 实验总体布局
实验总体布局如图3 所示。
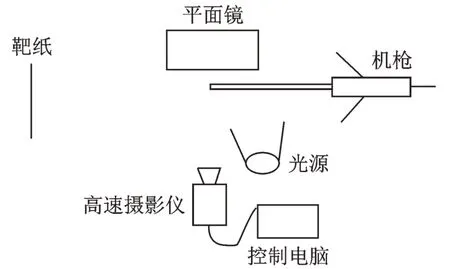
图3 实验总体布局Fig.3 General layout of experiment
机枪布置好后,以沙袋加以固定。进行试射以确定枪口指向靶纸。在枪口处布置平面镜,调整好角度后加以固定。在正对枪口和平面镜的方向适当距离远处布置高速摄影仪,过远则图像分辨率不足,过近则视场狭窄且有一定危险性。在枪口旁布置光源,要保证有足够的光通量,同时不能阻挡相机视场,不能使平面镜中的反光干扰拍摄。
实际布置如图4 所示。

图4 设备布置Fig.4 Equipment layout
1.3.2 参数设置
使用高速摄影测试的重要参数如下。
1)拍摄频率。拍摄频率代表着采集数据点的密集程度,当拍摄频率足够高的时候,采集的数据才能真实、完整的地反映实际物理过程。
2)图像分辨率。图像分辨率影响测得数据的精度,应尽量使用相机的满幅分辨率,并通过调整设备布局使被拍摄物理过程尽量占据整个图像,适当时可对图像进行切割。
3)光圈。光圈影响拍摄质量,光圈大则光通量大,拍摄的图像明亮,对比度高,但是景深较小;光圈小则光通量小,对比度低,但景深较大。应该优先满足景深要求,通过其他方式提高光通量。
本次实验采用的参数如下:拍摄频率为10 000fps;图像分辨率为768*680;光圈为2.8。
1.3.3 实验步骤
在枪口及枪管上设置追踪点及标尺,如图5所示。

图5 追踪点及标尺设置Fig.5 Tracking point and ruler setting
将机枪布置在距离靶纸100 m 处,进行试射以确保机枪正对靶纸,并以沙袋进行固定。然后进行试拍摄,以确定合适的参数及光源情况。一切准备妥当之后,开始进行实验。使用机枪进行五连发射击,用高速摄影拍摄机枪枪口的响应情况,将视频保存在电脑中,另外记录该组射击的着靶情况,总共进行5 组射击。
2 测试结果及分析
将实验中拍摄到的视频数据处理后得到机枪枪口响应的位移、速度及加速度曲线。用于了解枪口响应情况。通过实验数据提取出弹丸出膛时刻枪管的射角,计算出射弹散布并与实验射弹散布结果进行对比分析。
2.1 枪口响应曲线
由于5 组实验得到的曲线具有相同的规律,因此给出其中一组实验的枪口响应曲线。坐标系的建立如下:以枪口指向为x轴的正方向,垂直向上为y轴正方向,根据右手法则确定z轴正方向。具体到图像处理当中,坐标原点位置为图像左下角顶点位置。实验获得的枪口位移振动曲线如图6、图7所示。
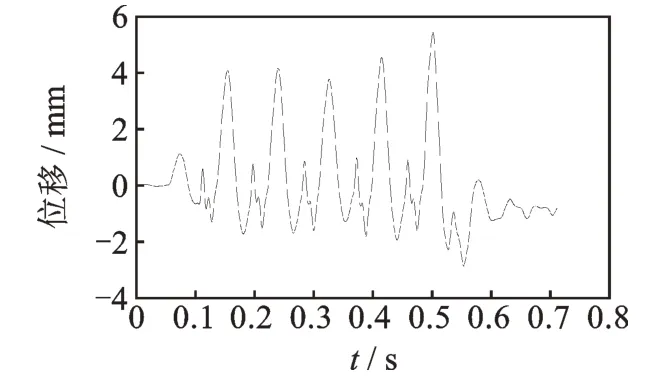
图6 枪口y 方向位移Fig.6 y-direction displacement of muzzle
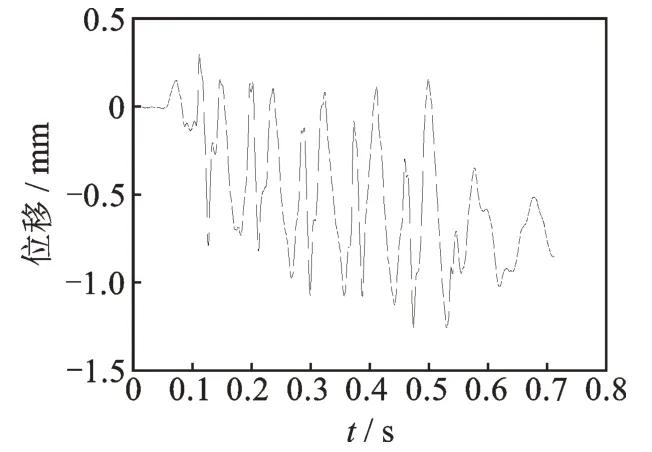
图7 枪口z 方向位移Fig.7 z-direction displacement of muzzle
由图可知,机枪枪口的位移具有明显的周期性,振动周期约为690 发/min,而该机枪的理论射频为680 发/min,枪口振动周期与机枪射频基本一致。对于y方向振动位移,每个周期中都先有2 个较小的波峰,然后有1 个较大的波峰,枪口位移最大振幅约为6 mm。对于z方向位移,每个周期中,有2 个大小较为接近的波峰,枪口位移最大振幅约为1.1 mm。对于y方向和z方向,射击前后枪口位置都有一定偏移,y方向偏移约为1 mm,z方向偏移约为0.5 mm。
通过位移曲线处理得到的枪口振动速度曲线如图8、图9 所示。

图8 枪口y 方向速度Fig.8 y-direction velocity of muzzle
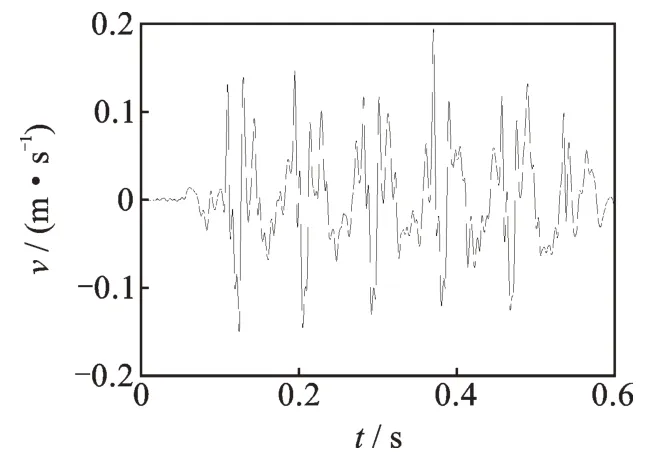
图9 枪口z 方向速度Fig.9 z-direction velocity of muzzle
枪口速度响应也具有与位移相同的周期性,且速度曲线与位移曲线的特征有明显的对应关系。对于y方向速度,速度的波动范围为-0.4~0.5 m/s。对于z方向,速度的波动范围约为-0.1~0.2 m/s。
通过速度曲线处理得到的枪口振动加速度曲线如图10、图11 所示。
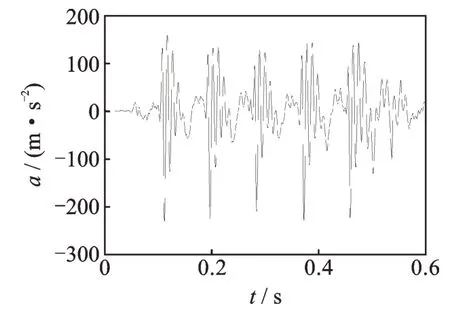
图10 枪口y 方向加速度Fig.10 y-direction acceleration of muzzle

图11 枪口z 方向加速度Fig.11 z-direction acceleration of muzzle
枪口加速度响应也有和位移相同的周期性,且加速度曲线与速度曲线的特征有明显的对应关系。对于y方向加速度,其波动范围约为-230~150 m/s2。对于z方向加速度,其波动范围约为-90~80 m/s2。
2.2 通过计算和实验射弹散布对比的准确性验证
影响连发散布的主要因素是弹头出枪口扰动和内弹道随机性。若不考虑内弹道的随机性,则可以通过弹头出枪口瞬间的射角估算弹头的散布,并与实验测得的射弹散布进行对比。
笔者在实验获得的着靶数据基础上,通过测绘的方法得到实验射弹散布。
由于机枪距离靶纸只有100 m,距离较短,弹道可以近似地看作是一条直线。通过射角与射距的三角函数关系计算得到弹头着靶位置之间的相对坐标,并由此计算出射弹散布。
通过数据处理得到的枪管瞬时射角如表1、表2所示,角度为枪管相对于坐标系的角度,时刻为弹丸出膛口时刻相对于拍摄开始时刻经过的时间。
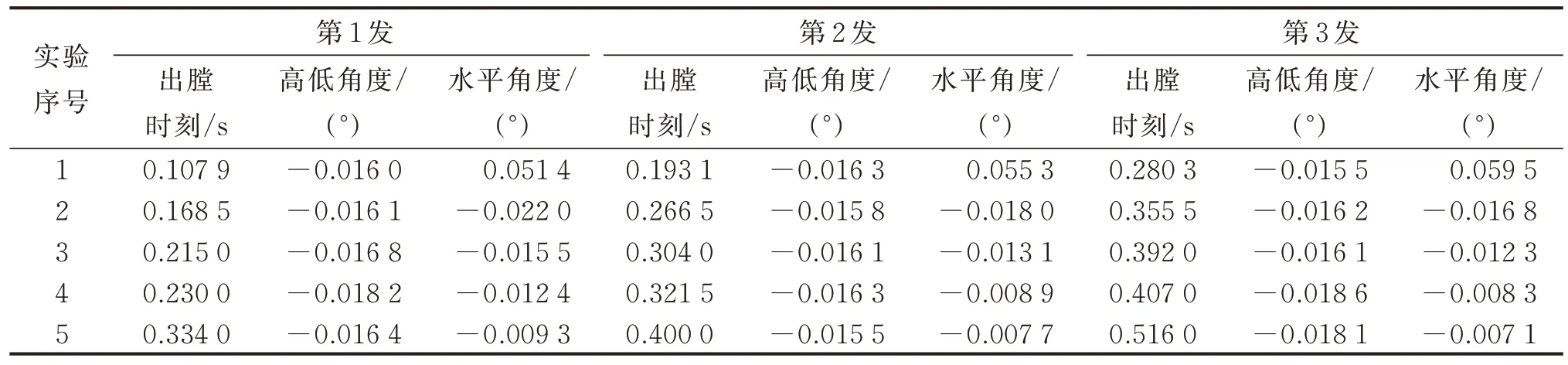
表1 前3 发弹丸出膛时刻及射角Tab.1 Time and angle of the first three projectiles

表2 后2 发弹丸出膛时刻及射角Tab.2 Time and angle of the later two projectiles
将计算和实验得到的射弹散布进行对比,如表3 所示。可以看出:基于枪口振动响应处理获得的瞬态射角计算所得的R50 比实验所得的R50 大,这是因为射弹数较少,R50 的随机波动性较大;计算所得的R100 与实验所得的R100 基本一致,这是由于假设中所忽略的单发散布造成的影响,实验得到的散布可能略大于计算得到的散布,也有部分情况下反过来。但是通过不同实验组的对比,可以认为计算散布和实验散布具有相同的趋势和大体上的一致性,这说明该测量方法具有一定的准确性。使用该测量方法得到的枪口振动可以用于计算射弹散布,具有一定的工程应用价值。
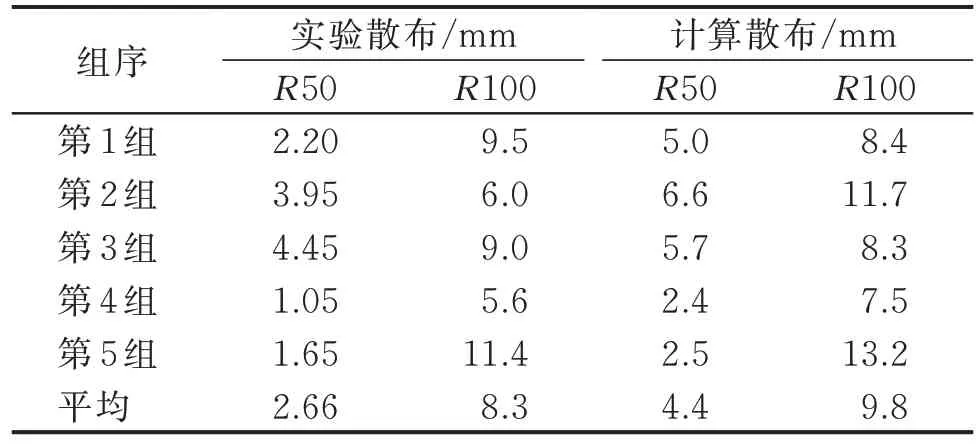
表3 计算与实验散布对比Tab.3 Comparisons of computational and experi‐mental dispersion
3 结论
1)使用单台高速摄影机二方向测试方法可以测量机枪枪口三维运动,方法简单有效。
2)测量与数据处理获得了典型通用机枪枪口响应的位移、速度和加速度曲线。测试结果表明:枪口y位移最大振幅约为6 mm,枪口z位移最大振幅约为1.1 mm;y方向速度的波动范围为-0.4~0.5 m/s,z方向速度的波动范围约为-0.1~0.2 m/s;y方向加速度的波动范围约为-230~150 m/s2,z方向加速度的波动范围约为-90~80 m/s2。枪口振动周期与机枪射频一致。
3)基于枪口振动响应处理得到的瞬态射角计算出来的散布R100 与实验得到散布R100 基本一致,说明该测试方法具有一定的准确性,可以用于计算射弹散布,具有一定的工程应用价值。
猜你喜欢
小哥白尼(军事科学)(2022年4期)2022-07-08 07:04:24
小学生学习指导(小军迷联盟)(2021年10期)2021-12-06 03:08:56
轻兵器(2021年2期)2021-02-27 10:23:12
当代党员(2020年20期)2020-11-06 04:17:52
小学生学习指导(小军迷联盟)(2020年9期)2020-10-14 11:21:06
小哥白尼(军事科学)(2020年3期)2020-07-27 01:55:16
小哥白尼(军事科学)(2018年12期)2018-12-19 05:17:00
小康(2018年23期)2018-08-23 06:18:52
红豆(2016年13期)2017-02-10 15:49:41
小康(2015年4期)2015-03-31 14:57:40