某轻量化大口径自行火炮车尾驻锄正向设计研究
2021-06-25 08:38:12单春来石春明刘欢刘军徐宏英
火炮发射与控制学报 2021年2期
单春来,石春明,刘欢,刘军,徐宏英
(西北机电工程研究所,陕西 咸阳 712099)
履带式自行火炮虽然有成本高、战略机动性差等缺点,但仍以其火力强、通过性高、防护性好等优势,在各类火炮中独占鳌头。如美国M109、德国PZH-2000、英国AS-90、我国PLZ-05等各型大口径履带式自行火炮,均为各国现役炮兵最精锐的主力装备。随着装备技术和战争理念的不断发展,高机动性能是当下武器装备基本且重要的要求之一,各类使用轮式底盘、车载底盘的轻型火炮以其出色的高机动性能在部队得到了大量列装,但履带式自行火炮无可比拟的强大火力和防护性能仍无法被取代。然而,随着我国大型运输机、运输舰的发展和列装,对履带式自行火炮的轻量化设计要求也同样越来越迫切,只有对这类重型装备进行大幅减重,才能在空运、空投、抢滩等过程中实现快速战略部署。与飞机、汽车、火箭等轻量化技术非常成熟的研究对象不同,火炮具有射击载荷大、冲击剧烈、有射击精度要求等约束条件,大幅减重极可能会对火炮的稳定性造成不利影响。因此,在火炮的研制工作中,最突出的矛盾就是随着全炮质量的减小,火炮的射击稳定性和安全性之间的矛盾[1]。
在目前可知的装备中,最为著名的两型超轻型大口径火炮是英国BAE公司研制的M777型155 mm轻型牵引炮和我国研制的AH-4型155 mm轻型牵引炮,战斗全重均为3.7 t.这两型火炮为解决轻量化带来的射击稳定性问题,采用了降低火线高、火炮下架着地、采用超长后坐距离、后坐质心前移、使用H型大架等一系列技术手段[2],而围绕超轻型牵引炮的发射动力学研究内容也相对丰富和成熟[3-4]。但对于自行火炮而言,虽然这些技术有一定的参考和借鉴意义,一些诸如后坐阻力控制[5]等技术也能在相当程度上提供支持,但轻量化设计对射击稳定性带来的不利影响仍然不能完全消除。如在履带式自行火炮中,质量较轻的美军M109A7自行榴弹炮全重为35.4 t,但由于仅采用了39倍口径身管,普通榴弹的最大射程仅为22 km,落后于国际平均水平;在其最新的改进型M109A8上,身管增长至58倍口径,火炮射程增加30%以上,但与此同时不得不对底盘进行增强,负重轮从6对增加到了7对。如何在不牺牲火力甚至提升火力的前提下,对履带式自行火炮进行轻量化设计,仍是火炮研制的难点问题。
笔者以某大口径履带式自行火炮为对象,研究轻量化设计对火炮的射击稳定性带来的不利影响,通过配备驻锄并对驻锄参数进行正向设计,大幅提高火炮的射击稳定性,为该型号火炮的总体设计提供重要支撑和指导作用。
1 计算模型
以某新一代大口径轻量化履带式自行火炮为研究对象,与现役对标装备相比,该火炮的火力得到了增强,炮口动能增加;而装备全重降低了18%以上,悬挂等底盘运动系统也根据全重进行了重新设计。在这样的载荷条件和设计要求下,火炮的射击稳定性必然会受到不利的影响。采用火炮装备的常规分析手段对火炮进行发射动力学仿真分析[6-7],对射击时的火炮受力和运动状态做如下几点基本假设:
1)各部件均为刚体,不考虑局部变形;
2)不考虑各部件的间隙及尺寸误差,约束为理想约束;
3)地面为水平硬质地面,不考虑地面变形;
4)忽略旋转稳定弹丸的回转力矩影响。
全炮的几何模型如图1所示,将该模型导入RecurDyn中,正确设置各部件之间的运动关系、接触、摩擦及相关系数,根据内弹道设计方案,在弹底-膛底间施加炮膛合力并在反后坐装置中施加后坐阻力作为输入载荷,即可进行动力学仿真[8]。RecurDyn下的高速履带模块Track-HM可以实现不同类型的履带系统的详细建模,是进行履带车辆复杂动力学系统仿真分析的理想工具[9]。笔者以RecurDyn仿真软件为工具,建立动力学仿真模型并进行计算。

2 射击稳定性仿真与分析
该口径火炮需在静止状态下射击,以全装药条件下的炮膛合力和后坐阻力为载荷条件,最大高低射角(以下简称射角)为65°,最远射程射角为52°,稳定性最差射角为0°.对以上3种射击工况进行仿真计算并分析结果。在模型中,分别取车首中点、车尾中点以及质心点作为观测点,从观测点随时间变化的曲线形态上可以看出车体的运动姿态,并可与现役对标装备的历史测试数据进行对比,评判火炮的射击稳定性。
图2所示为0°射角下的车体姿态变化曲线,图中曲线以发射时刻为起始时刻。由图2可知,在整个发射过程中,车体最大仰角达到了6.5°,最大俯角达到了3.2°;车首位置的前测点最大跳高超过了420 mm,车尾后测点下沉超过了350 mm.车体在发射后的5 s左右基本恢复到静止状态。

图3所示为0°射角下的各负重轮的跳高情况及其随时间的变化曲线,图3(a)和3(b)中负重轮从右至左依次为负重轮1到6,由图3可知,在0°射角下,车体发生较大俯仰,车体跳高过大,负重轮跳离地面过高;图3(c)中的曲线表明,车体上仰时,前3组负重轮分别离地250、135、和35 mm,车体下俯时,第6组负重轮离地超过50 mm.
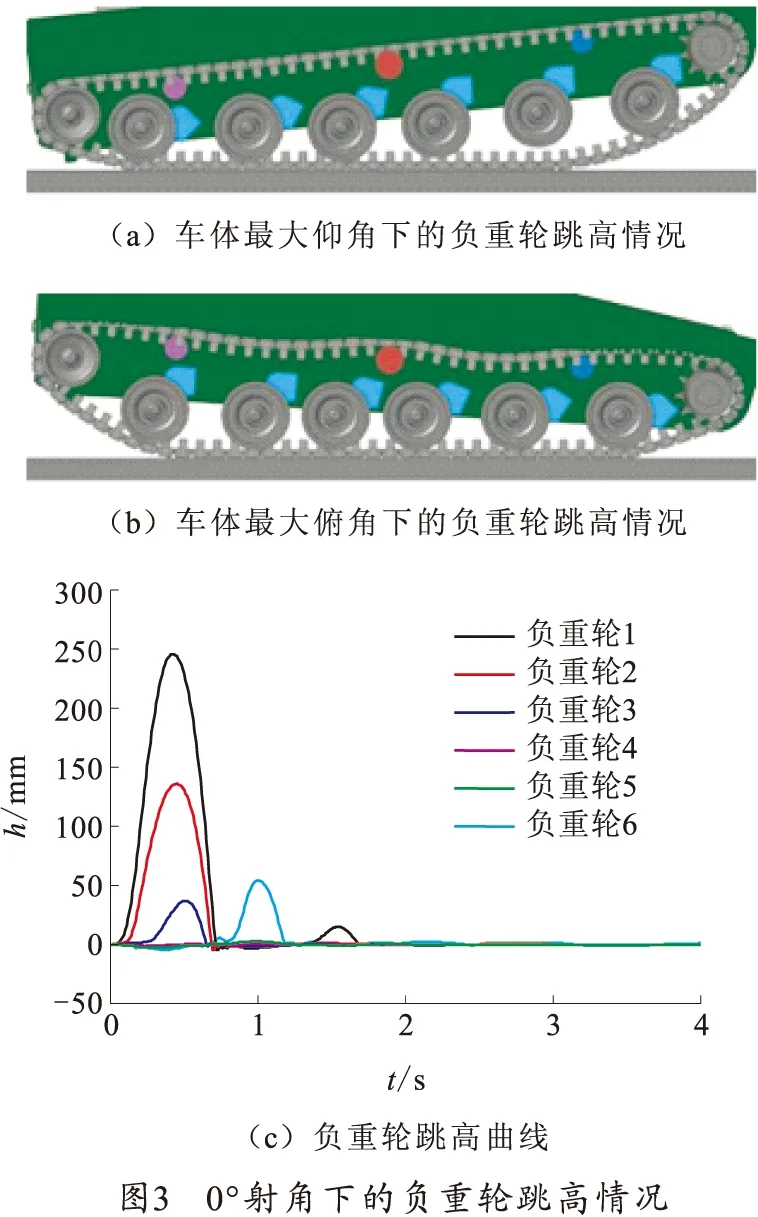
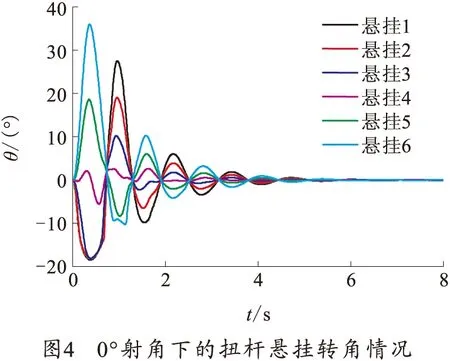
图4所示为0°射角下的各扭杆悬挂转角情况,车身上仰时,第6组悬挂转动角位移超过36°,车身下俯时,第1组悬挂转动角位移达到28°.由于发射过程中扭杆悬挂的变形过大,会给悬挂的使用寿命带来不利影响。
在52°射角和65°射角下,车体姿态与图3曲线呈现相同的趋势,在这两种射角下,车体最大仰角分别达到4.7°和3.3°;最大俯角分别达到2.2°和1.7°;车首位置的前测点最大跳高分别达到320 mm和230 mm,车尾后测点下沉分别超过250 mm和210 mm.另外,这两种射角下,负重轮也有较大的离地跳高,扭杆悬挂同样有较大的转动位移。
该火炮的现役对标装备在服役初期进行过相关射击稳定性测试,测试中包括了在0°、52°、65°射角下,使用全装药和底凹弹,在水泥炮位和土炮位上进行射击后的车首跳高的测试项目,该轻量化设计方案在相应测点上的平均最大跳高均超过现役装备3倍以上。综上可知,该轻量化火炮初期设计方案的射击稳定性无法满足使用要求。
3 稳定性提升方案及正向设计
3.1 基本原理
由该火炮的动力学仿真结果来看,其稳定性远远不能满足要求,而通过在车体后侧安装驻锄增加支撑效果,可以有效降低车身的俯仰角和跳高,提高稳定性,一些车载炮等轻型高机动大口径火炮也都采用这一思路。虽然会增加一定成本,但该炮的战斗全重与现役装备相比已减重超过了18%,因此配备驻锄的方案仍是高效可行且十分必要的。
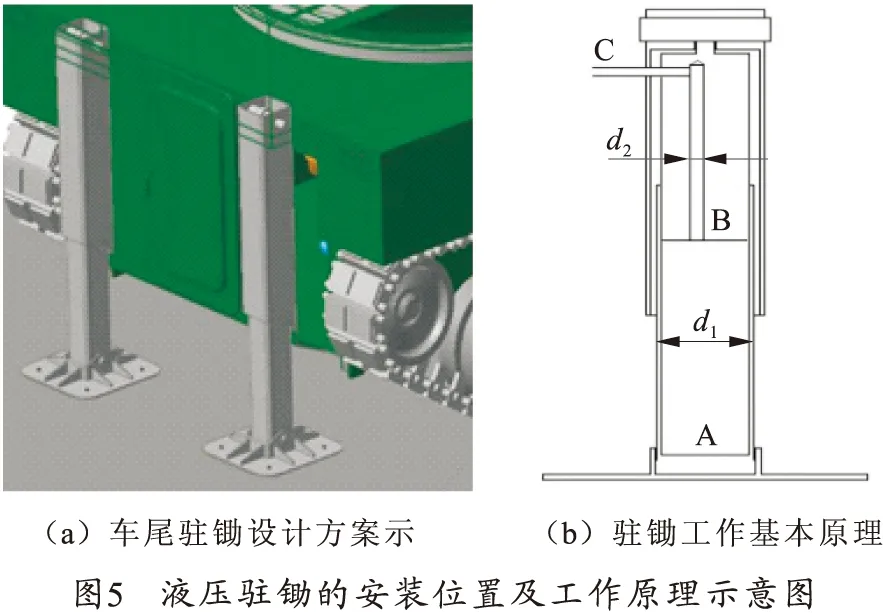
与传统牵引火炮使用的刚性驻锄不同,车载炮使用的驻锄通常为液压支撑系统,性能稳定,状态转换快捷[10]。驻锄的初期设计方案及基本工作原理如图5所示,驻锄由外部方筒、内部油缸、液压缓冲装置等部分组成,外部方筒与车体固定连接,油缸的活塞杆与座板铰接。在火炮射击过程中,油缸内腔A被压缩,油液从A腔流入B腔,由于A腔的孔径d1大于B腔的孔径d2,B相当于阻尼孔,根据小孔流量公式有
(1)
式中:Q为通过小孔的流量;Cq为小孔流量系数;S为小孔面积;ΔP为小孔两侧压差;ρ为液体密度。
在实际结构中,B腔后还会设计多层阻尼孔结构,直至与液压缓冲器相连,液压缓冲器中充满氮气等弹性储能体,在液压驻锄受压时储能,射击结束后释放能量推动油液回到A腔,使车体回到静止位置。以油液进入B腔后,经管径为d3的C腔(d3 (2) 式中:QAB为每单位时间内由A腔流至B腔的油液流量;vA为A腔内的油液流速;ΔPAB为A腔和B腔之间的压差。同理, (3) 式中,各参数下标的意义与式(2)相同。将油液视为不可压缩流体,即认为QAB=QBC,则可在式(2)、(3)中消去vB,得到 (4) (5) 式(4)、(5)相加即可得到ΔPAC,从而得到液压阻力为 (6) 式中,f即为液压缓冲器的压缩阻力系数: (7) 如果在B腔后还设计有更多油液腔时,推导公式过程与上面相同。更一般地,有 (8) 式中:S0为液压驻锄活塞工作面积;Sx为设计中的结构各孔等效面积。 由式(6)可知,f值越大,车体发生俯仰时,驻锄能够提供的支撑力就越大,车体的俯仰角就越小,稳定性越好;但由式(7)可知,由于通常驻锄尺寸由全炮整体设计确定,d1取值的范围也就可以确定,f值越大时,各孔径d2、d3的尺寸就要求越小,各孔径处的阻力就越大,驻锄的性能就难以保证,可靠性就越差。因此,最优设计是寻找合适的f,既能保证驻锄有足够的支撑性能,本身又有良好的可设计性,指导驻锄结构的设计。 根据相关经验,对多种不同可行设计方案的f值进行计算,取值均在0.8~50 Gg/m的范围内。使用RecurDyn提供的DOE功能,可对f在0~100 Gg/m的范围内进行等间距取值,间隔为0.5 Gg/m,通过计算得到各f值对应的车体最大仰角和驻锄最大支反力,结果曲线如图6所示。由图可知,在各射角下,车体最大仰角和驻锄最大支反力均随着f的增加而增大(其中最大仰角取负值,即绝对值随着f的增加而减小),其中,0°射角下,最大仰角趋近于0.29°,驻锄最大支反力趋近于216 kN;52°射角下,最大仰角趋近于0.22°,驻锄最大支反力趋近于323 kN;65°射角下,最大仰角趋近于0.21°,驻锄最大支反力趋近于343 kN. 由图6中所示,各曲线上均在6~9 Gg/m附近的位置存在明显拐点:在拐点之前,最大仰角和支反力对f的变化敏感;在拐点之后,最大仰角和支反力对f的变化不敏感。根据敏感因子定义,定义目标函数: g=g(x1,x2,…,xk). (9) g对每一个参数xk的敏感性可用敏感因子进行衡量,可定义敏感因子为[11] (10) 当敏感因子较大时,说明目标函数对该参数当前取值点附近的变化较敏感;当敏感因子较小时,说明当前参数进行小范围变化时,目标函数不会发生太大变化。对多参数进行对比,式(10)中的xk通常要进行无量纲化,但由于本例中仅涉及f一个参数,因此无需无量纲化。将图6曲线对横坐标求导后进行归一化,得到如图7所示的曲线。根据敏感因子分析,当取f=8.0 Gg/m时,各敏感因子均小于2%,可认为是较理想的选择,即f超过8.0 Gg/m后,最大仰角和支反力几乎不再发生变化。分别计算该取值后各射角下的射击稳定情况。 当车尾部增加驻锄且驻锄的压缩阻力系数f=8.0 Gg/m时,0°射角下的车体姿态变化曲线如图8所示。通过驻锄增强车体后部支撑后,车体的最大仰角控制在了0.82°,最大俯角控制在了0.39°,分别是无驻锄状态下的12.6%和12.7%;前测点跳高下降到了77 mm,后测点下沉为31 mm;车体在发射后的2 s左右即能恢复静止,有助于提高车内士兵的工作效率;第1组负重轮在车体上仰时离地跳高最大,为29 mm,为无驻锄状态下的11.6%;第2组悬挂的最大转角最大,为11.5°,是无驻锄状态下的32%.由图8数据可知,通过在车尾安装驻锄并对驻锄的压缩阻力系数进行合理设计,车身稳定性得到了极大提高,结合设计经验并与现役对标装备进行对比,能够满足稳定性要求。 安装驻锄后,52°射角下的车体姿态变化曲线与图8曲线呈现相同的变化趋势。该射角下,车体最大仰角为0.47°,为无驻锄状态下的10%;最大俯角为0.16°,为无驻锄状态下的7%,车首位置的前测点最大跳高为34 mm,车尾后测点下沉26 mm,均控制在无驻锄时的10%左右。 安装驻锄后65°射角下的车体姿态变化曲线如图9所示。由曲线可知,该射角下,车体最大仰角为0.30°,为无驻锄状态下的9%;最大俯角为0.05°,为无驻锄状态下的3%;车首位置的前测点最大跳高为21 mm,车尾后测点下沉为21 mm,也均控制在无驻锄时的10%左右。该射角下的车身姿态曲线呈现出与另外两种射角下完全不同的趋势:图9(b)中的前测点、后测点和质心的纵向位移的运动趋势相同,而其他图中的运动趋势相反。表明:在未安装驻锄时的3个射角和安装驻锄以后的0°和52°两种射角下,射击时车身以俯仰运动为主;而在安装驻锄后的65°射角下,车体以平动的运动方式整体下沉,然后在悬挂和驻锄的作用下反弹恢复,恢复过程中车体有轻微的俯仰动作,但并不明显。 配备驻锄前后的车身稳定性主要指标如表1所示。由表中数据可知,在各射角下,车身仰角、俯角以及负重轮的最大跳高均能改善87%以上。 表1 配备驻锄前后的车身稳定性指标对比 对某轻量化设计的大口径履带式自行火炮进行了多体动力学仿真计算,计算分析结果表明,该火炮的初始设计方案在射击时车体俯仰角过大,跳高过高,稳定性差,不能满足使用要求。对驻锄的压缩阻力系数进行正向设计,选取合适的值重新进行仿真计算,结果表明车身俯仰角、测点跳高等各项考察的稳定性指标均改善了90%左右,优于现役对标装备,能够满足稳定性要求。该研究为该轻量化大口径履带式自行火炮的正向设计提供了技术支撑,但初期方案设计阶段的设计模型中需要采用一些简化,如研究中未考虑驻锄与土壤之间的接触关系和土壤本身变形因素,这些更加深入的工作将在接下来的详细设计工作中继续开展。3.2 设计方案
4 安装驻锄后的稳定性分析

5 结束语
猜你喜欢
中国水利水电科学研究院学报(2023年1期)2023-03-14 04:57:18
探测与控制学报(2020年4期)2020-09-02 07:52:44
小哥白尼(军事科学)(2020年2期)2020-06-16 03:11:04
初中生世界·九年级(2020年2期)2020-04-10 06:47:22
测井技术(2018年5期)2018-12-26 12:03:28
科技视界(2016年15期)2016-06-30 12:48:10
机电产品开发与创新(2014年5期)2014-03-11 16:42:39
意林·少年版(2011年4期)2011-07-06 05:07:01
小哥白尼·趣味科学画报(2006年8期)2006-03-18 07:41:12
军事历史(1988年3期)1988-08-16 02:32:56