子空间约束的一阶秩1干扰下的自适应检测
2021-06-24 09:27骆艳卜
电子与信息学报 2021年6期
邹 鲲 来 磊 骆艳卜 李 伟
(空军工程大学信息与导航学院 西安 710077)
1 引言
雷达信号检测理论是建立在统计假设检验基础上的[1],检测性能在很大程度上依赖背景噪声统计模型。由于在检测器设计阶段,雷达工作环境统计特性无法完全确定下来,因此在对某个待检测单元进行检测时,还需要一定数量的参考单元,用于估计待检测单元背景噪声统计特性,从而可以自适应调整检测器中的权值,在抑制噪声的同时完成信号的检测,这种检测方法称为自适应检测器。
经典的自适应检测器,如Kelly[2]提出的广义似然比(Generalized Likelihood Ratio Test, GLRT)检测器,采用了单步(1-step, 1S)准则,将待检测数据和参考数据一起用于构造GLRT检测器。由于雷达检测问题一般不存在一致最大势检验,这种GLRT检测器并不能保证在任何情况下的最优性[3]。因此人们提出了不同设计准则下的自适应检测器,基于双步(2-Step, 2S)准则,可以得到自适应匹配滤波器(Adaptive Matched Filter, AMF)[4],其与基于Wald准则得到的检测器[5]具有相同的结构,而基于Rao准则得到的自适应检测器[6]对导向矢量失配较为敏感。
雷达探测环境的复杂性[7]一方面显著降低了这些经典检测器的检测性能[8],另一方面也促进了自适应检测技术的发展[9]。假定参考数据协方差矩阵为Rs,而待检测单元背景噪声协方差矩阵为Rp。经典的自适应检测算法要求Rs=Rp,即所谓的均匀性。如果放松这一约束条件,假定Rs=cRp,其中c为某个未知因子,这种探测环境称为部分均匀场景,对应的GLRT检测器结构也会发生变化,即所谓的自适应相干估计器[10](Adaptive Coherence Estimator, ACE)。进一步非均匀场景[11]中,即Rs≠Rp,自适应检测将更加困难。导致场景的非均匀性[12]不仅可以来自探测环境地物分布,也可以来自各种可能的干扰(interference)。干扰对接收信号的影响从统计层面上可以分为1阶干扰和2阶干扰[13],其分别影响了回波数据的1阶和2阶统计特性,其中正交干扰[14]、低秩干扰[15]、子空间干扰[16,17]等都属于1阶干扰。对于噪声干扰源[18],也可以看作2阶干扰[19]。2阶干扰在某些情况下也可以等价于非均匀场景模型[20]。在多通道雷达检测问题中,噪声干扰源通常具有明显的方向性,导致干扰分量具有秩1特性[21]。文献[22]证明了待检测单元受到2阶秩1干扰时,检测器结构就是ACE。文献[23]则考虑待检测单元和参考数据同时受到1阶子空间干扰和2阶秩1干扰时的检测问题。
本文考虑探测环境中存在似噪声覆盖脉冲(Noise-like Cover Pulse, NCP)的干扰源,其导致了待检测单元与部分参考单元受到1阶秩1干扰。针对该检测问题,文献[24]基于2SGLRT检验准则,首先假定噪声协方差矩阵已知,利用待检测单元和受干扰的参考数据推导广义似然比检测器,然后利用未受污染的参考数据估计噪声协方差矩阵,将其估计值并代入检测器中,得到的检测器为D-NCP-D。由于该检测器在噪声协方差矩阵估计时仅仅利用了部分参考数据,导致了在干扰功率较低时,检测性能较差(检测概率随着信噪比的增加不能达到100%,参见文献[24]图8—图10)。本文的主要贡献在于:
(1) 将1阶秩1干扰约束在某个已知的子空间内。子空间约束(Subspace Constrained, SC)表征了干扰分量的先验信息,充分利用这些先验信息有助于提升检测性能。需要指出的是,若该子空间为整个信号空间,对应的检测问题就退化为文献[24]的检测问题,因此D-NCP-D是本文提出的检测器的一个特例。
(2) 改进检测器设计准则,提升检测性能和计算效率。文献[24]基于2SGLRT检验准则中,噪声协方差矩阵的估计仅仅利用了部分未受干扰的参考数据,由于参考数据使用不充分,检测性能得不到充分的发挥。本文提出了M2SGLRT和3SGLRT两种检测器设计准则,其中基于M2SGLRT准则可以利用全部参考数据用于噪声协方差矩阵的估计,有效提升检测性能,而基于3SGLRT准则可以显著降低检测器计算量,且检测性能不劣于D-NCP-D。
2 检测问题
考虑多通道雷达,天线阵列个数为Na,相干处理间隔内的脉冲数量Np,那么来自待检测距离单元的回波信号,经过下变频、正交双通道数字采样和匹配滤波之后,可以用一个长度为N=Na×Np的矢量z0表示,假设其服从复高斯分布,协方差矩阵为N维Hermitian正定矩阵M,且假定未知。待检测单元回波矢量z0中还叠加有未知幅度β0的干扰矢量s,假定该矢量s被约束在由N×r列满秩矩阵H 的列张成(用<H >表示)的子空间内,即s=β0H φ,其中φ 表示干扰矢量s在<H>内的坐标,且未知。本文假定H是已知的,代表了对干扰的部分先验信息。假定在H1假设下,待检测单元回波矢量z0中包含了未知幅度α的有用信号v,其也称为导向矢量。在自适应检测问题中,还存在K+L个参考数据,即ZL=[z1, z2, ···, zL], ZK=[z1,z2, ··· , zK]。这些参考数据也服从复高斯分布,协方差矩阵为M,但参考数据ZL叠加了未知幅度βl的干扰矢量s, l=1, 2, ···, L。综上所述,考虑如式(1)所示的自适应检测问题
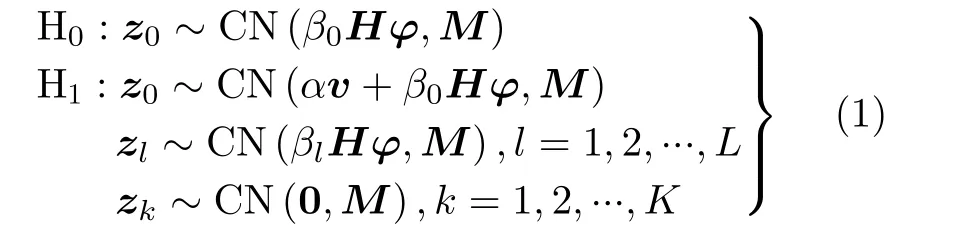
其中,CN(a,A)表示均值矢量为a,协方差矩阵为A的复高斯分布,符号~表示“服从某种分布”。在这个假设检验问题中,未知量包括了有用信号幅度α,干扰分量幅度βl, l=0, 1, ···, L,干扰矢量在子空间内的坐标矢量 φ和背景噪声的协方差矩阵M。在构造检测器过程中,如何充分有效处理这些未知参量,将极大影响最终的检测性能。
2.1 基于2SGLRT的检测器设计
所谓2SGLRT准则,就是首先假定噪声协方差矩阵M是已知的,利用待检测单元数据z0和L个受干扰的参考数据ZL完成GLRT检测器结构设计,然后再利用K个未受干扰的参考数据完成噪声协方差矩阵M的估计,将其估计值并代入该检测器结构中。文献[24]采用了这种检测器设计策略,本文进一步假定了干扰约束在某个子空间内,因此文献[24]获得的检测器可以作为本文提出的2SGLRT检测器的一个特例,即H为单位矩阵的情况。
利用统计假设问题式(1),在H0下的似然函数可以表示为

其中
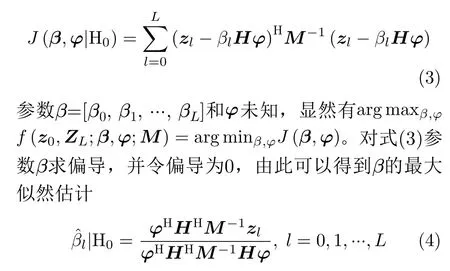
将式(4)代入式(3)中得到

在H1下的似然函数可以表示为
其中
如果给定参数β可以得到
采用循环优化的方法可以得到最终估计值,具体方法参见文献[24]。再将未受干扰的K个参考可以得到噪声协方差矩阵M的最大似然估计[2]
需要指出的是,如果矩阵H=IN,那么SC-2SGLRT就退化为文献[24]的D-NCP-D检测器。从推导过程可以看出,噪声协方差矩阵M的估计仅仅使用了K个未受干扰的参考数据,如果K取值较小,可能导致噪声协方差矩阵估计质量变差,严重影响了检测性能。文献[24]的研究结论中,当噪声占主导作用时,D-NCP-D检测器性能明显下降,甚至当信噪比足够大时,检测概率仍然达不到100%。而SC-2SGLRT采用子空间约束干扰模型,可以通过利用干扰的先验信息提升检测性能。
2.2 基于M2SGLRT的检测器设计
采用2SGLRT准则设计检测器过程中,噪声协方差矩阵M的估计仅仅利用了K个参考数据,如果K值不够大,那么必然会带来M的估计质量降低,影响最终的检测性能。为此本文提出了一种修正的双步广义似然比检验(M2SGLRT)准则,其也分为两个步骤设计检测器结构。首先假设噪声协方差矩阵M和干扰矢量在子空间坐标φ已知,利用待检测单元构造似然比。然后利用L+K个参考数据对噪声协方差矩阵M和干扰矢量在子空间中的坐标φ进行估计,将估计值代入检测器结构中,完成检测器设计。这种设计思路可以充分利用有限的参考数据获得较好的噪声协方差矩阵M的估计,对提升检测器性能是有帮助的。
为此首先给出待检测单元在H0下的似然函数
该似然函数中,首先假定仅β0未知,容易得到其最大似然估计

代入式(15)中可以得到

同样,H1下的待检测单元似然函数可以写成
其中,β=[β1, β2, ···, βL]是讨厌参数,其不参与最终的检测器结构设计。可以利用式(11)的方法得到估计值,并代入式(21)中,可以得到
由于参数M和 φ的估计不能单独给出,为此也可以采用循环优化的方法。当给定M时,利用式(6)的推导方法,可以得到
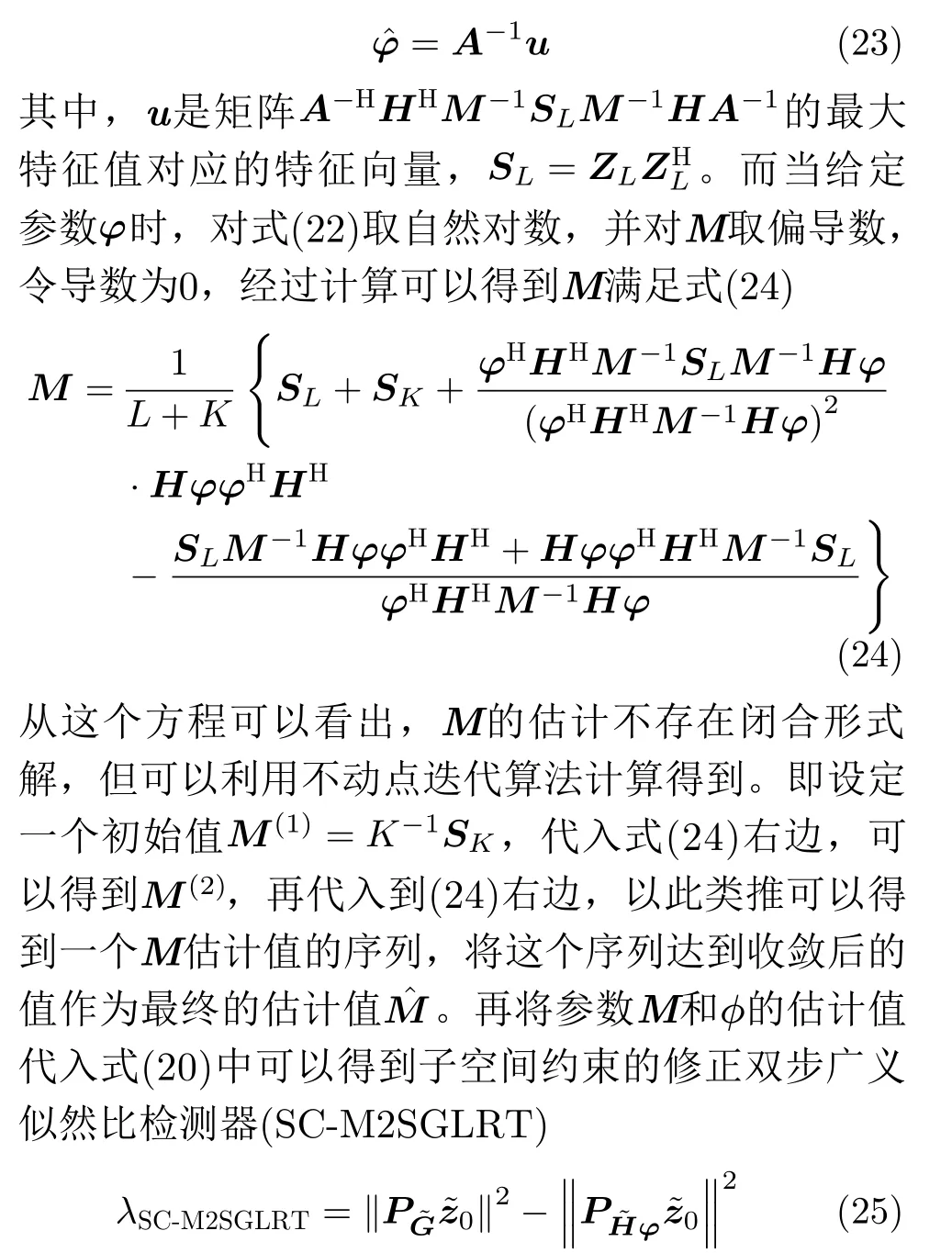
该检测器的最大特点在于利用了L+K个参考数据估计噪声协方差矩阵,从而可以有效提高噪声占优时的检测性能。与SC-2SGLRT对比还可以发现,SC-M2SGLRT具有简单的检测器结构,其中表示白化后的待检测数据,和分别是信号和干扰联合子空间和干扰子空间H~φ上的两个正交投影矩阵,因此式(25)可以看作在这两个子空间上投影长度平方差。
2.3 基于3SGLRT的检测器设计
无论是2SGLRT还是M2SGLRT,得到的检测器需要用到循环优化方法或不动点迭代算法,这些算法计算量较大。为此本文提出了一种基于3SGLRT的检测方法,分为3个步骤设计检测器结构。首先假定噪声协方差矩阵M和干扰分量在子空间坐标φ已知,利用待检测单元构造GLRT检测器,其检测器结构中包含了未知参数 φ和M。然后假定噪声协方差矩阵M已知,利用受污染的参考数据获得干扰分量在子空间坐标 φ的估计值,替换GLRT中的未知参数 φ。最后利用未受干扰的参考数据获得噪声协方差矩阵M的估计,并代入GLRT中,替换未知参数M。
该检测器设计的第1步是利用待检测单元构造似然比,其推导过程与SC-M2SGLRT相同,可以得到式(20),噪声协方差矩阵M的估计为式(13),参数 φ的为式(23),将上述估计值代入式(20)中,可以得到最终的检测器结构

值得指出的是,SC-3SGLRT具有与SC-M2SGLRT相同的检测器形式,主要区别在于M的估计值不一样。正是由于此处噪声协方差矩阵M的估计使用了K个未受干扰的参考数据,因此整个检测器计算过程中不涉及迭代计算问题,计算效率得到了显著提升。
3 检测性能分析
本文采用蒙特卡罗仿真分析检测性能,基于Neyman-Pearson准则,计算指定虚警概率Pfa的检测门限,再计算给定信噪比条件下的检测概率Pd。门限的计算采用了100/Pfa次独立仿真获得,检测概率的计算则是采用了1000次独立仿真获得。在仿真噪声数据过程中,噪声包含了白噪声分量和相关噪声分量,对应的噪声协方差矩阵M包含白噪声协方差矩阵和相关噪声协方差矩阵两个部分
干扰与噪声的功率比(Interference to Noise Ratio,INR)则定义[23]为

秩1干扰约束在已知子空间内,子空间由矩阵H的列矢量张成。
对于基于2SGLRT和M2SGLRT检验准则的检测器,涉及了迭代计算问题,为此首先分析本文提出的检测器计算效率问题。M2SGLRT检测器中在计算噪声协方差矩阵M的估计时,采用了不动点估计方法,图1(a)给出了迭代计算过程中两次计算值之差的范数随着迭代的变化关系。误差的计算采用独立运行10次进行平均。由此可以得到迭代次数与平均误差的曲线关系。仿真中N取4, 8和16时的不动点估计性能,其中L=N+2, K=N+4。可以看出几乎只需迭代1次就可以达到最小误差值,且最小误差随N的增加变化不大。图1(b)给出了3种检测方法的计算耗时对比分析。这里设定H=IN,因此检测问题中干扰不受子空间约束,那么2SGLRT检测器等价于文献[24]的D-NCP-D检测器。计算耗时与检测问题的尺寸N有关,采用200次独立运行,获得计算1个统计量所需的时间的平均值,计算机采用的是Intel Core i5处理器。可以看出,随着N的增加,检测器计算时间都会增加,但D-NCP-D的运算量最大,而3SGLRT的计算不涉及迭代计算,其计算量最小,M2SGLRT计算量居于上述两者之间。因此,从本文的分析结果来看,采用M2SGLRT和3SGLRT准则得到的检测器,具有较好的计算效率。
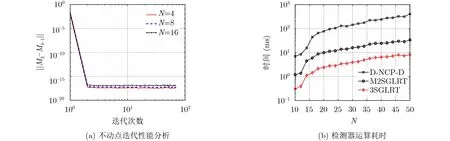
图1 数值计算性能分析
再分析检测性能。在计算机仿真参数中,设定N=8, L=10, K=12,虚警概率Pfa=10—3, H为N×2列满秩矩阵时,表示干扰受子空间约束,检测器名称前带有前缀符号“SC-”。若H为N×N单位矩阵,表示干扰不受子空间约束,此时检测器名称不带前缀符号。
考虑到INR与检测性能密切相关,首先分析INR较小时,各种检测器的性能对比。检测性能结果如图2所示。其中图2(a)为无干扰情况下的检测性能,图2(b)为INR=0 dB的检测性能。可以看出,当干扰功率较小时,采用2SGLRT的检测器D-NCP-D的性能最差,这是因为其仅仅利用了部分参考数据完成噪声协方差矩阵的估计,噪声的抑制能力减弱,最终降低了检测性能。还可以发现,随着信噪比的增加,D-NCP-D的检测概率很难达到100%,这一点与文献[24]描述是一致的。而采用了子空间约束的SC-2SGLRT检测器,其检测性能得到了提升,这说明可以利用干扰的先验信息提升D-NCP-D的检测性能。但从仿真结果来看,利用干扰的先验信息提升检测性能对3SGLRT的提升效果不明显,而对2SGLRT和M2SGLRT提升显著。
当干扰强度较高时,检测性能如图3所示。可以看出,随着干扰强度的增加,D-NCP-D的检测性能得到了增强,但由于未使用干扰的先验信息,其检测性能弱于对应的子空间约束版本SC-2SGLRT。由于干扰功率较强,意味着回波中蕴含干扰的信息较多,因此采用子空间约束对于性能的提升效果减弱了,即SC-M2SGLRT的性能较为接近M2SGLRT,而SC-3SGLRT的性能几乎与3SGLRT一样。仔细对比图3(a)和图3(b)还可以看出,对于强度较高的干扰,如INR=20 dB, 2SGLRT检测性能会略高于3SGLRT,但自始至终2SGLRT检测性能明显优于其他检测器性能。因此从仿真分析结果来看,对于高强度干扰,采用子空间约束提升检测性能效果较弱,但采用合适的检验准则可以显著提升检测性能。
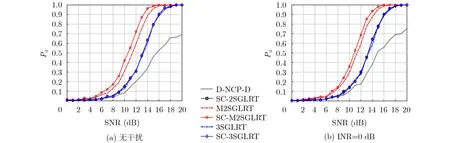
图2 INR较低时的检测性能对比分析
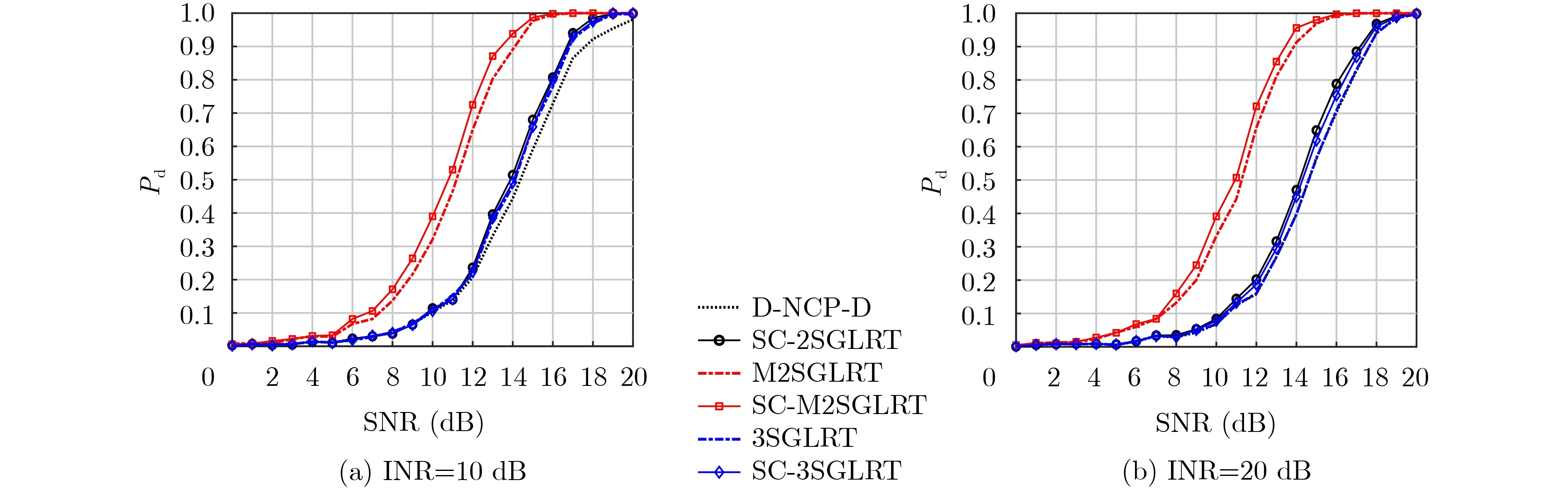
图3 INR较高时的检测性能对比分析
4 结论
本文针对待检测单元和部分参考数据受到1阶秩1干扰的自适应检测问题展开研究,提出了干扰受子空间约束时的3种检测方法。通过理论分析和计算机仿真,得到了如下结论:
(1) 采用子空间约束的秩1干扰模型,由于利用了干扰的部分先验信息,有助于提升干扰条件下的检测性能,特别是在INR较低的情况下,采用子空间约束版本的检测器性能提升明显。
(2) 采用M2SGLRT准则得到的检测器,可以获得较好的检测性能,其计算量低于2SGLRT检测器。
(3) 采用3SGLRT准则得到的检测器,可以获得较高的计算效率,且仅仅在高INR值时,其检测性能略低于2SGLRT检测器。
综上所述,在干扰功率较强时,推荐采用不受子空间约束的M2SGLRT检测器,而在干扰较弱时,推荐使用子空间约束版本。对计算效率要求较高时,推荐使用3SGLRT检测器。2SGLRT计算效率低,且在低INR时的检测性能下降显著,一般不推荐使用。
猜你喜欢
数学物理学报(2020年1期)2020-04-21
中国交通信息化(2017年9期)2017-06-06
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
系统工程与电子技术(2016年7期)2016-08-21
考试周刊(2016年54期)2016-07-18
自动化学报(2016年8期)2016-04-16
工业设计(2016年11期)2016-04-16
浙江共产党员(2015年11期)2015-05-23
湖南水利水电(2014年2期)2014-02-27
河南科技(2014年22期)2014-02-27