
基于GPRS和SVR的滑坡灾害远程监测系统设计
2021-06-24 07:24:44李宏俊赵雪琼孙瑜
微型电脑应用 2021年6期
李宏俊, 赵雪琼, 孙瑜
(1.云南国土资源职业学院 建设工程学院, 云南 昆明 652501;2.四川省核工业地质调查院, 四川 成都 610052)
0 引言
滑坡是一种分布广、数量大和频繁发生的地质灾害,不但可以产生直接灾害,而且可以造成很多次生灾害。滑坡可以摧毁厂矿、中断交通、掩埋村镇以及阻塞河道,造成巨大的经济损失和人员伤亡,并且带来严重的社会影响和政治影响[1-2]。与工程治理相比,滑坡监测预警作为滑坡灾害风险控制的主要手段具有易于实施和成本低等优点,因此滑坡灾害远程监测预警被广泛地应用。早期滑坡灾害监测主要根据人工观测地表变化特征、周围动植物和地下水等异常来推测滑坡灾害发生的可能性[3]。随着科技进步和通信以及网络技术快速发展,水准仪、经纬仪、全站仪、GPS监测以及InSAR技术等被广泛地应用于滑坡灾害预测[4-5]。虽然这些技术的应用提高了滑坡灾害预测水平,但是仍然很难准确预测,主要原因是位移、裂纹等现象只是滑坡产生的必要条件,但不是充分条件,也就是说滑坡灾害发生前一定会产生位移和裂纹,而有裂纹和位移则不一定发生滑坡。因此,直接从“现象监测”很难对滑坡灾害进行超前准确预测,要实现滑坡灾害的超前预测,必须寻找到滑坡灾害发生的超前信息。大量研究文献表明,超前滑动力变化是滑坡灾害的充分必要条件,因此,实时监测超前滑动力的变化就能预测滑坡灾害的发生。为提高滑坡灾害远程监测的实时性和预警预报的高效性,结合GPRS网络传输效率高、信号强而稳定的优点,在传统的滑坡灾害远程监控系统的基础上,设计了一种基于GPRS和支持向量回归机(SVR)的滑坡灾害远程监测预警预报系统。
1 滑坡灾害远程监控系统数学模型
传统的滑坡灾害远程监控(Sliding Perturbation Remote Monitoring,SPRM)系统[6-7]是在超前滑动力数学模型的基础上建立起来的。SPRM系统力学模型如图1所示。
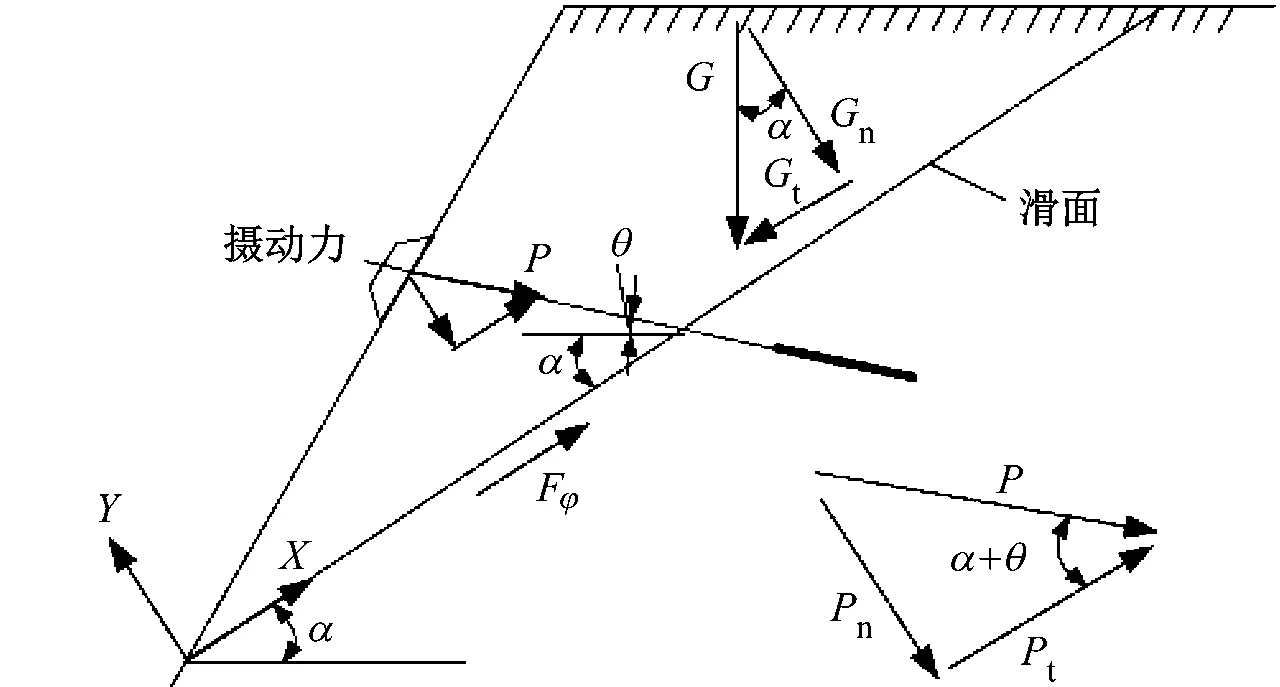
图1 SPRM系统力学模型
根据SPRM系统力学模型,滑动摩阻力如式(1)。
(1)
处于极限平衡状态时如式(2)。
Gt=Pt+Fφ
(2)
超前滑动力的函数关系式如式(3)。
(3)

2 监测系统拓扑结构
SPRM系统由数据采集终端、远程通信端和监测主站系统端组成。其拓扑结构如图2所示。
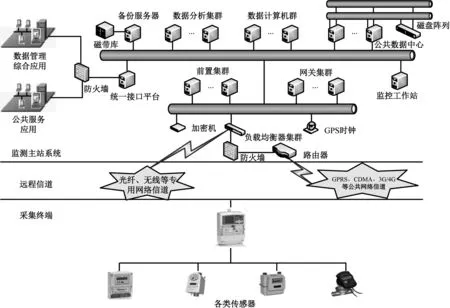
图2 SPRM系统结构图
其中,数据采集终端主要通过现场数据采集仪器或设备监测和采集锚索摄动力的数据;远程通信端主要负责监测数据的远程传输;监测主站系统端主要负责接收数据、自动分析处理数据并进行管理应用。
3 滑动力监测预警预测模型
根据相关参考文献的研究成果[8-9],文中确定4种基本预警模式,从而为滑坡灾害预警预报提供科学参考和分析依据。
3.1 预警准则
SPRM系统中锚索设计采用的初始预紧力,如式(4)。
P0=(0.25~0.50)Pmax
(4)
预警准则如式(5)。
(5)

3.2 预警模式
根据摄动力力学原理分析可知[10],滑坡灾害预警模式分为稳定模式、滑坡模式、软化压入模式和振动扰动模式4种预警模式。
(1) 稳定模式
稳定模式如图3所示。
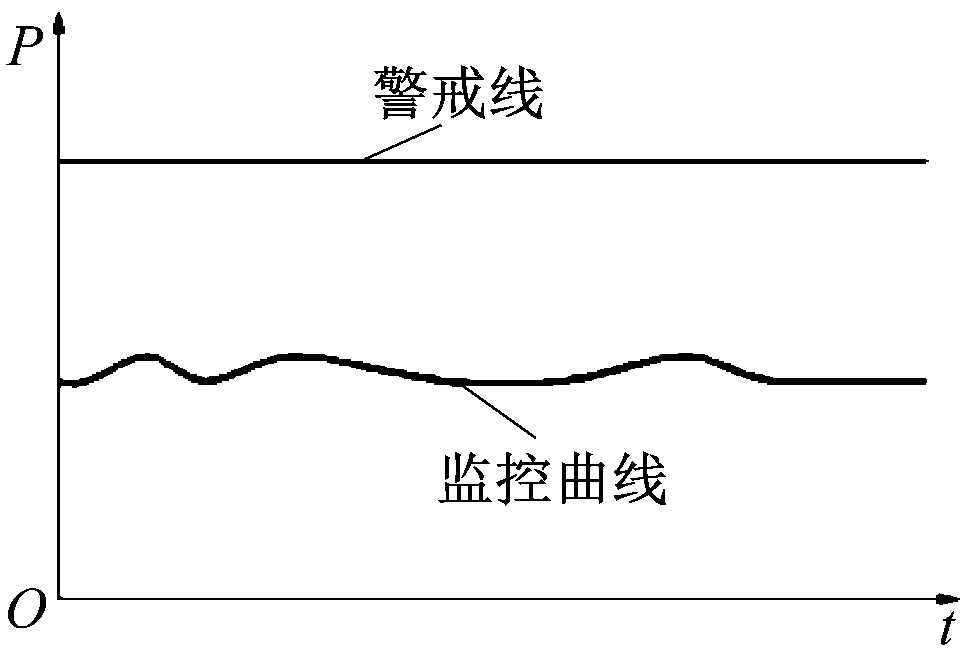
图3 稳定模式监控曲线
由图3可知,监控曲线和警戒线没有交点并且总体没有相交的趋势。
(2) 滑坡模式
滑坡模式如图4所示。
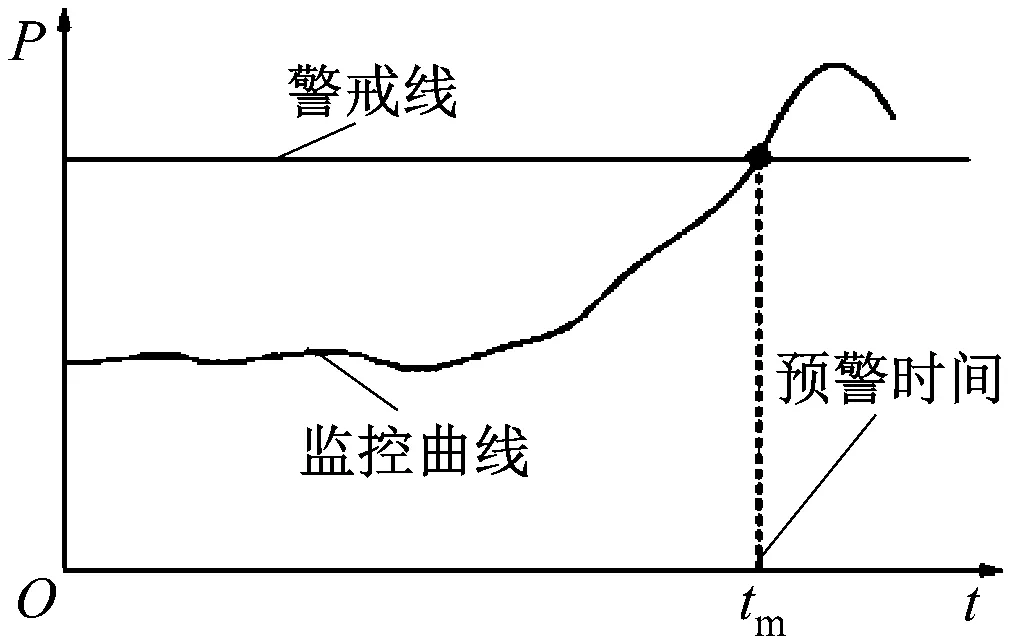
图4 滑坡模式监控曲线
由图4可知,监控曲线和警戒线在监测预警时间tm之后滑动力监测值超过滑动力预警值,此时将发生滑坡灾害。
(3) 软化压入模式
软化压入模式如图5所示。
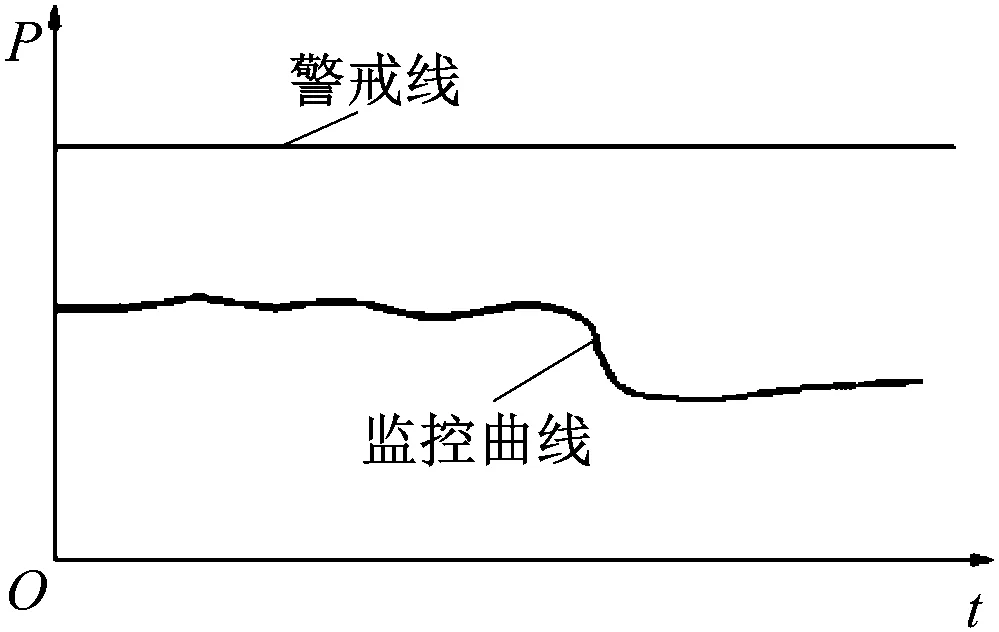
图5 软化压入模式监控曲线
由图5可知,在某一时间段内,该模式的监测曲线会出现加固力降低的现象,产生这种现象的原因是雨水等地表水的入渗,导致锚索端部锚墩下方土体发生软化,在锚索拉力作用下锚墩压入土体使得锚索伸长量减小导致预应力降低。
(4) 振动扰动模式
振动扰动模式如图6所示。

图6 振动扰动模式监控曲线
由图6可知,在某一时段,该模式监测曲线会出现明显的脉冲波动,之后会恢复原状。
3.3 预测模型
为实现滑坡灾害的预测,文中运用支持向量回归机[11-12](Support Vector Regression,SVR)对滑动力进行预测,从而实现滑坡灾害的预测。如果t时刻的滑动力为x(t),那么滑动力历史数据的时间序列如式(6)。
X(t)=[x(t),x(t-1),x(t-2),…,x(t-p)]
(6)
式中,p为嵌入维数。假设t时刻为滑动力的预测原点,预测步长为h,因此滑动力时间序列的预测可以描述为已知滑动力时间序列X(t),运用t时刻之前的滑动力数据预测t+h时刻的滑动力数据。根据SVR预测原理,将x(t)、x(t-1)、x(t-2),…,x(t-p)和x(t+h)分别作为SVR的输入向量和输出向量,建立SVR滑动力预测模型,从而实现滑动力的预测,滑动力预测步骤如下。
Step1:设定训练样本长度L、预测步长h和嵌入维数p,构建训练样本的输入向量和输出向量,训练样本的输入向量和输出向量分别为x(p+1),x(p+2),…,x(L-h)和x(p+1+h),x(p+2+h),…,x(L-h)。
Step2:SVR参数初始化:运用网格搜索法得到SVR模型的惩罚参数和核参数。
Step3:建立SVR滑动力预测模型。
Step4:按Step1处理滑动力数据,将下一采样时刻监测的实际滑动力数据送入滑动力时间序列,运用滑动窗口法更新旧的滑动力数据并实现滑动力预测。
4 滑坡灾害远程监测预报实例分析
本文滑坡灾害系统实施之后应用于某露天矿区并进行了滑坡灾害监测应用,取得了较好的效果,主要取得了如下成果。
(1) 成功地解决了信号传输问题。运用GPRS通信网络代替了GSM通信网络,有效地扩大了数据传输距离,数据监测点与信号接收机的传输距离扩大到(1 000-1 500)m。监测现场信号接收机设置如图7所示。

图7 矿区现场信号接收机安装图
GPRS代替GSM通信网络之后,信号强而稳定,通信盲区消失,数据采集和传输效率大大提高、数据量也大幅提升,为滑坡灾害监测提供了强有力的通信和数据传输基础。

(7)
(8)
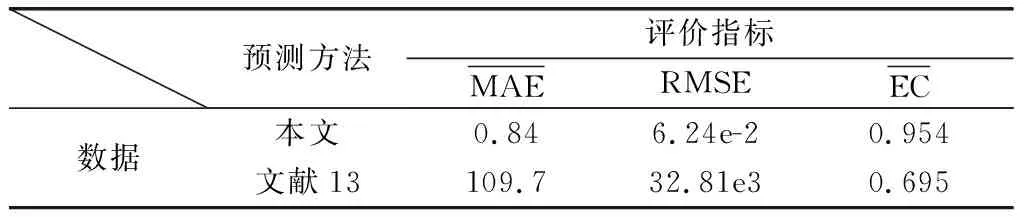
表1 评价指标对比结果

2019年6月1日一天内,预测结果对比如图8所示。
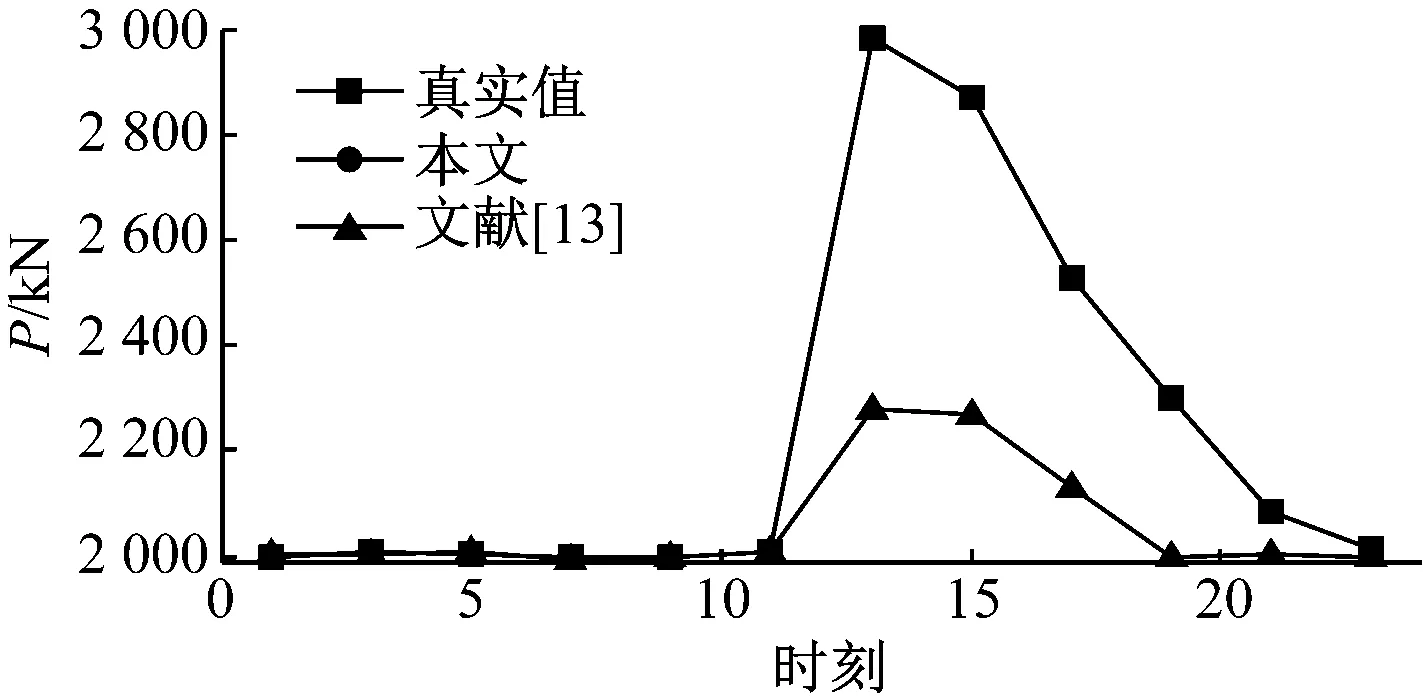
图8 不同预测方法预测结果
由图8可知,对于6月1日,本文预测值几乎等同于实际值,特别是当发生突发情况时,本文都能给出精确的预测结果,而文献[13]很难反映出真实情况。这表明,本文采取的预测方法,具有很好的预测性能。为了进一步对比传统SPRM系统与本文SPRM系统性能,选择2018年10月5日—2018年10月9日采集的数据为研究对象,对比传统SPRM系统与本文SPRM系统采集的数据,对比结果如图9所示。
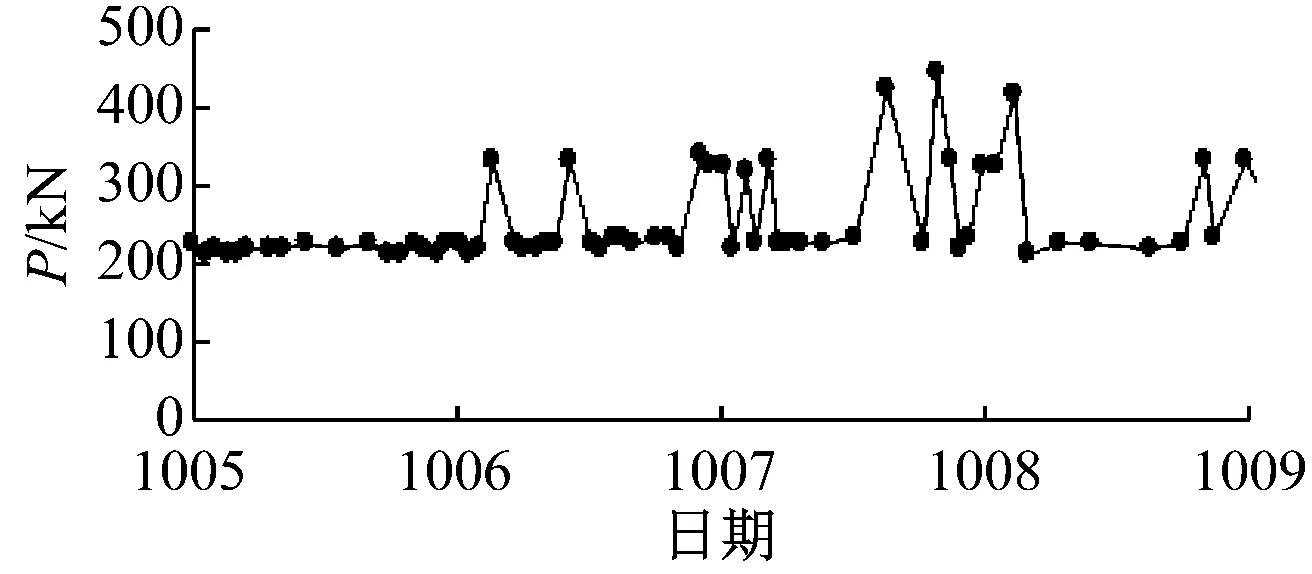
(a) 传统SPRM系统

(b) 本文SPRM系统
由图9可知,与传统SPRM系统相比,本文SPRM系统采集的监测数据在同一时间段更加平滑而稳定,同时数据传输效率也大幅度提高,提高了数据采集和传输的实时性,提高了抗干扰能力,而且避免了传统SPRM系统的因网络数据阻塞和数据丢失所产生的不利影响。
(3) 实现了滑坡灾害预警预报的自动化。从实验仿真“第二部分”可以看出,本文SPRM系统能够准确预测未来某一阶段的滑动力,通过与“预警线”对比,即可自动实现滑坡灾害预警预报模式。具体工程应用结果如图10所示。

图10 滑坡灾害预警预报结果
图10中,各监测点滑坡灾害模式用不同颜色表示。监测点No.II-7滑坡灾害预报等级为稳定模式,用蓝色表示;监测点No.3-2滑坡灾害预报等级为振动扰动模式,用黄色表示;监测点No.4-2滑坡灾害预报等级为软化压入模式,用橙色表示。图10中监测点滑坡灾害模式不是一层不变的,随着时间推移,本文SPRM系统持续预测未来一段时间监测点可能发生的滑坡灾害,并通过改变颜色辨识,实现自动预警功能。
5 总结
本研究在传统的滑坡灾害远程监控(Sliding Perturbation Remote Monitoring,SPRM)系统的基础上,设计出了一种基于GPRS和支持向量回归机(Support Vector Regression,SVR)的滑坡灾害远程监测预警预报系统。工程实践结果表明,该系统可以有效提高滑坡监测数据的传输稳定性和效率。该系统主要成果如下:(1)成功地解决了信号传输问题;(2)提高了数据采集及传输的稳定度与抗干扰能力;(3)实现了滑坡灾害预警预报的自动化。然而,随着本文SPRM系统应用范围的不断扩大以及监测区不同的地质特征和环境条件,下一步将研究在现有系统基础上建立一套普适性的预警模式和预警标准。
猜你喜欢
军事文摘(2022年20期)2023-01-10 07:18:38
江苏安全生产(2022年8期)2022-11-01 09:15:18
英语文摘(2021年11期)2021-12-31 03:25:18
江苏安全生产(2021年6期)2021-08-05 07:47:14
河北地质(2021年1期)2021-07-21 08:16:08
江苏安全生产(2020年5期)2020-06-15 09:38:52
学生天地(2018年19期)2018-09-07 07:06:30
北方交通(2016年12期)2017-01-15 13:52:59
水利科技与经济(2016年6期)2016-04-22 05:07:30
山东青年(2016年3期)2016-02-28 14:25:50
