
非接触式自动扶梯运行质量检测方法与装置研究
2021-06-22 06:02王庆阳高梦迪郭焕银张凤标
宿州学院学报 2021年3期
王庆阳,高梦迪,郭焕银,张凤标,靳 松
1.宿州学院机械与电子工程学院,安徽宿州,234000;2.安徽省特种设备检测院,安徽合肥,230009
随着国民经济的快速发展,推动了人们生活水平和工作效率的提高,各种高层建筑不断出现并且日益普遍,电梯作为建筑内提供垂直交通运输的不可缺少的特殊交通工具被广泛应用在住宅、写字楼、大型购物中心、车站、机场以及公交枢纽。我国在用电梯保有量世界第一,达628万部[1]。随着我国电梯保有量的不断增长,电梯安全事故也不断发生。国家特种设备安全监察局发布的数据显示,近五年因电梯事故造成的死亡人数达198人[2]。2018年国务院发布的《关于加强电梯质量安全工作的意见》中明确提出要形成更加完善的电梯质量安全工作体系。
电梯运行安全与否,可通过对电梯进行检验、检测,评估电梯安全状态加以判断。目前已有相关国家标准和规范对自动扶梯的检验和运行质量进行了明确的规定,如《自动扶梯和自动人行道的制造与安装安全规范》[3]和《电梯监督检验和定期检验规则—自动扶梯和自动人行道》[4],其中主要检测参数包括:名义速度与实际运行速度的偏差、启动加速度、制动减速度、制停距离、两侧扶手带与梯级/踏板之间的同步率等。乘客在超速运行的扶梯上下过程中很容易跌倒;紧急情况时,制动减速过快、制动距离过长,均有可能导致乘客摔伤,甚至造成踩踏事故,威胁到乘客的生命安全;另外,当扶手带运行滞后于梯级/踏板时,乘客有后仰摔倒的可能。因此,在扶梯安装检查、监督检验和定期检验时,要特别重视自动扶梯的运行质量,检测自动扶梯的运行质量对保障人们的生命财产安全具有十分重要的意义。
1 现有检测方法分析
现行的国家标准和检验规则尚未规定采用哪些具体的检测仪器和检测方法,目前主要依靠人工标记、肉眼判读的方式实施检测,方法不科学,人为因素大,数据误差大。国内一些检测机构及企业针对自动扶梯运行质量的检测仪器及检测方法进行了研究,并开发了相应的仪器。许磊等[5]开发了一种利用光栅圆盘检测自动扶梯制停距离的装置,该装置利用扶手带的摩擦力带动光栅圆盘转动对扶手带运行速度进行测量,并将所得结果作为该扶梯的梯级运行速度,但扶手带运行速度实际上是大于梯级的运行速度的,故该装置测量结果不准确。代清友等[6]提出采用图像传感器获得梯级运行位移后,通过电流检测模块测量扶梯电机的启动和停止时间,从而获得梯级速度及制停距离,由于驱动电机一般在自动扶梯的端站机舱内,需打开机舱盖板,对电机进行拆接线,费时费力、效率低。
胡世章等[7-9]开发了一种自动扶梯性能检测装置,其检测原理如图1所示,文献[10-11]设计了一种自动扶梯制动性能检测方法及装置,其检测原理如图2,现场安装检测如图3所示,这些装置均是通过滚轮与梯级/踏板以及扶手带相接触的方式进行测量的。其检测原理和方法均是通过滚轮与水平运行的梯级/踏板接触检测梯级/踏板的速度,及采用滚轮与扶手带接触检测两侧扶手带运行速度后,通过光电编码器进行数据采集最后由计算机系统进行数据处理。
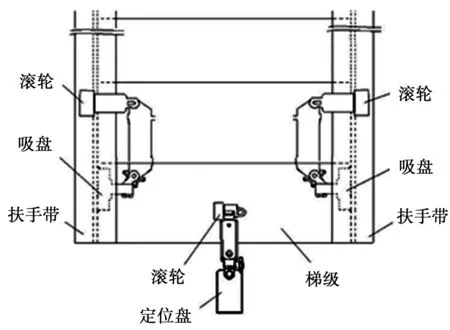
图1 滚轮传动检测方案原理图
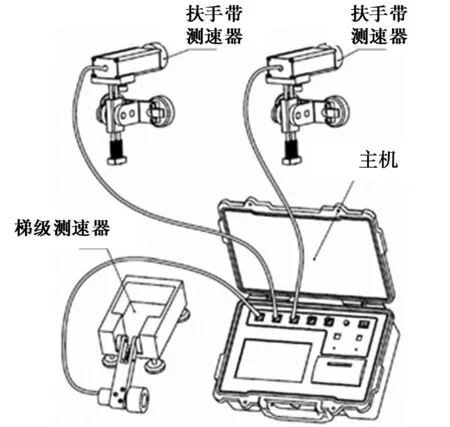
图2 滚轮传动检测方案

图3 滚轮传动检测方案检测现场
大量的检测实践表明,采用滚轮传动的检测方案存在以下问题:
(1)由于滚轮与梯级/踏板或扶手带仅仅是表面接触,并非像齿轮副那样良好地啮合,不能保证恒定的传动比,所以无法排除滚轮打滑的现象。
(2)滚轮多用柔性塑料制成,长期使用滚轮会磨损。夏天高温季节滚轮与接触面压紧后会变形,冬季滚轮变硬更易打滑。
(3)自动扶梯/自动人行道在运行过程中偶尔会产生波动或抖动的现象,梯级/踏板的齿形表面常会粘有污物,这些都会导致滚轮与移动的表面接触不良。
以上滚轮传动检测方案存在的缺陷会导致检测效率较低、检测结果不准确,尤其当检测结果处于合格判定的边界时,检测人员难以给出准确的检测结论,影响检测报告的及时性、权威性。基于此,研发新型自动扶梯运行质量检测装置以提高检测的准确性和检测效率十分重要。
2 非接触式自动扶梯运行质量检测方法各组成模块及工作原理
由于我国自动扶梯保有量大,维保检查和定期检测任务繁重,因此,检测方法及装置应轻质便携、安装快捷、高效准确。本检测方法采用“传感器模块+嵌入式微控制系统+计算机”的模块化结构设计,配备非接触的专用传感器,共包括5个检测模块:扶手带测速模块、梯级测速模块、制停距离测量模块、嵌入式微控制系统,以及计算机管理模块。其系统组成及工作原理,如图4所示。
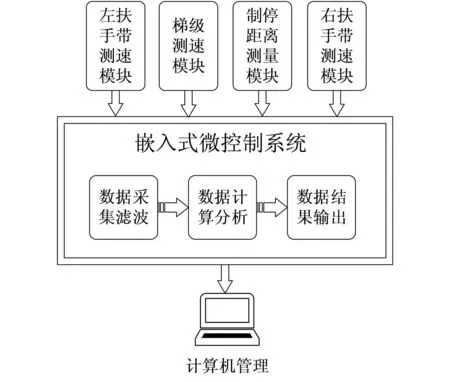
图4 自动扶梯运行质量检测方法组成模块及工作原理
2.1 扶手带测速模块
扶手带测速模块包括左侧扶手带测速模块和右侧扶手带测速模块,其结构相同。该模块用来测试扶手带的直线运行速度,并与梯级/踏板的运行速度相比较,以判断其是否符合要求,其测速原理如图5所示。采用非接触的光电反射传感器,通过调节机构,采用真空吸盘吸附在自动扶梯的玻璃护板上,使光电反射传感器的光电头射出的光束射在扶手带上表面。在一侧扶手带的上表面,粘贴间距为L0的反光片1和反光片2,反光片的形状为细长条形,条宽约5 mm。
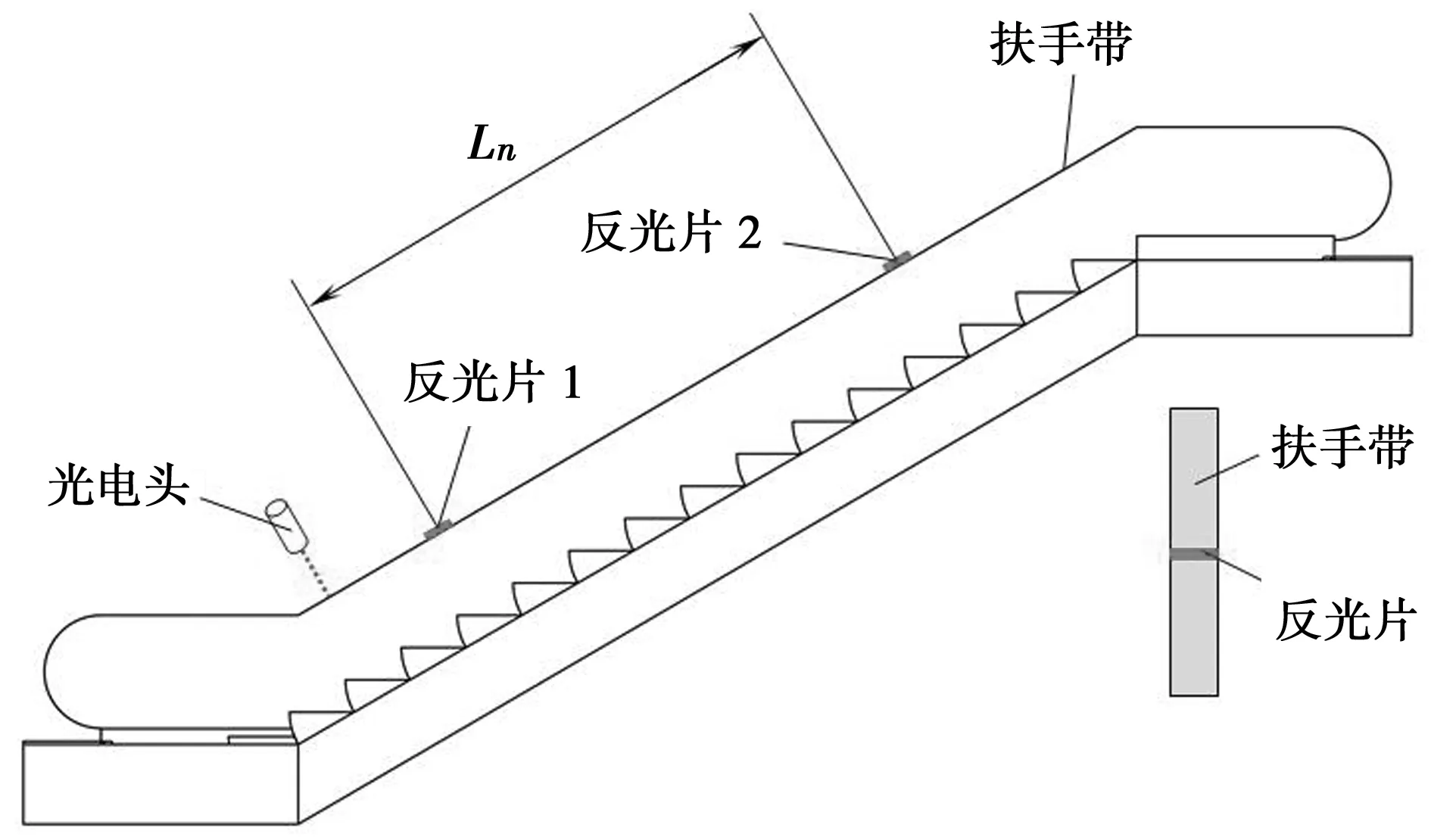
图5 扶手带测速光电传感器的安装示意图
扶手带在稳速运行状态下,光电头射出光束,当光电头检测到反光片1时记录时刻t1,检测到反光片2时记录时刻t2。已知两个反光片之间的距离为L0,则扶手带的运行速度为v=L0/(t2-t1)。微控制系统将该速度与测得的梯级/踏板运行速度进行比较,即可判断扶手带的运行速度偏差是否符合要求。
2.2 梯级测速模块
梯级测速模块用于检测梯级/踏板的空载运行速度和启动时扶梯的加速度及制停时的减速度,其原理如图6所示。在扶梯/人行道运行方向的出口处设置一角度可调的激光测距传感器,激光头射出的光束既与梯级/踏板在倾斜区段的运行方向平行,也与两侧的玻璃护板平行。在高处的梯级/踏板上设置一反光幕,该光幕的角度可以调节。调整激光测距传感器的高度和激光头的角度,使其射出的光线垂直打在光幕上。
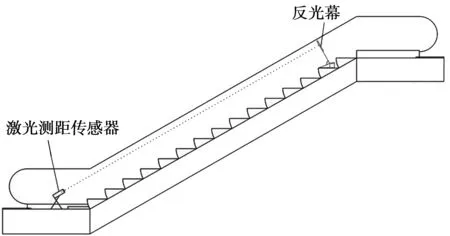
图6 梯级测速激光传感器的安装示意图
当扶梯/踏板稳速运行时,激光测距传感器在ti时刻测得距离li,如(t0,l0)、(t1,l1)、(t2,l2)…(tn-1,ln-1)、(tn,ln),则可算得运行速度如式(1)所示。
(1)
……
从而求得平均速度:
v=(v1+v2+……+vn)/n
(2)
此速度即为梯级/踏板沿着运行方向的实际运行速度。
另外,根据上述记录的数据,尚可算得运行过程的加速度/减速度如式(3)所示。
(3)
则可求得平均加速度/减速度为:
(4)
2.3 制停距离测量模块
制停距离可与梯级的运行速度同时测试,仍然基于图6。让激光测距传感器的光束射到置于高处梯级上的反光幕,开启扶梯,待其进入稳速运行状态后:
(1)第一次激发传感器,记录反光幕与激光头的距离l0,并记录时刻t0;
(2)稳速运行一段距离后,第二次激发传感器,同时触发自动扶梯的急停按钮,记录反光幕与激光头的距离l1,并记录时刻t1;
(3)待自动扶梯停止后,第三次激发传感器,记录反光幕与激光头的距离l2。则(l1-l0)/(t1-t0)即为梯级沿扶梯运行方向的移动速度,l1-l2即为扶梯沿运动方向的制停距离。
2.4 嵌入式微控制系统模块
嵌入式微控制系统模块主要用于人-机界面管理和扶梯参数检测的数据采集、滤波、分析和计算及数据输出等。该模块采用ARM系列高速微处理器,灵敏触摸屏管理人-机界面[9,12],可方便地设置测试参数,如自动扶梯倾斜角度、额定速度及反光片之间的间距。该模块还具有微型热敏打印机,可以实现在检验现场打印检测结果,用于现场判定检测结果是否合格,并同时出具检测报告。
2.5 计算机管理模块
该模块主要用于对检测装置采集的数据进行储存、处理和分析,可通过USB传输接口实现检测装置和上位机的数据交换。上位机专用数据库管理软件的开发,可实现对测试数据的处理和对比分析。该模块的设计和应用为特种设备监察机构对自动扶梯运行状况的评估提供数据支撑。
3 非接触式自动扶梯运行质量检测装置结构设计
根据上述各检测模块工作原理,设计非接触式自动扶梯检测装置,各检测模块三维结构以及现场检验过程场景模拟如图7所示。

图7 自动扶梯运行质量检测装置模拟图
在自动扶梯运行的下端站,通过吸盘吸附玻璃护壁板将光电反射传感器固定在扶手带上方。光电反射传感器的高度、角度通过与吸盘相连的支架可以调节,从而使光电头发出的光线射在扶手带表面。在扶手带表面粘贴反光片,反光片的数量、间距可根据检测需要自行设置。上述结构可实现扶手带运行速度检测。
在自动扶梯运行下端站的机舱盖板上架设三脚架,三脚架上设置有激光测距传感器。在自动扶梯梯级上摆放反光幕,反光幕设置在基座上。根据自动扶梯的倾角,通过设置在三脚架上的角度调节旋钮调节激光测距传感器的角度,通过设置在基座的角度调节旋钮调节反光幕的角度,从而使激光头射出的光束既与梯级/踏板在倾斜区段的运行方向平行,也与两侧的玻璃护板平行,同时垂直打在反光幕上。上述结构可实现梯级运行速度、制停距离、制停减速度的检测。
检测仪控制箱内设置有各模块的数据输入接口,测试启动、停止按钮,测试参数的设置输入模块,可设置的参数包括反光片的间距,自动扶梯的额定速度、倾角、梯号,以便区分一次检验过程的多台自动扶梯;通过内置的热敏打印机现场打印检测结果。利用该检测装置对自动扶梯现场检测时,其检测流程如图8所示。

图8 自动扶梯运行质量检测流程
4 案例分析
为验证本文提出的非接触式自动扶梯运行质量检测方法和装置的可行性和准确性,对某商场室内、室外两台同型号自动扶梯进行检测,并将其与传统滚轮检测装置进行对比。设置检测方案1为采用传统滚轮传动检测装置进行检测,检测方案2为采用本文所研究的非接触式测量装置进行。该商场用自动扶梯的主要参数如表1所示。

表1 所检测自动扶梯基本参数
分别采用两种检测方案检测两台自动扶梯的扶手带运行速度、梯级运行速度、制停距离和制停减速度参数。为了避免由于检测误差造成的检测结果的不稳定性,采用两种检测方案分别对上述参数进行5次测量,其检测结果如表2和表3所示。根据检测结果绘制两台自动扶梯在两种检测方案下多次测量的结果对比曲线,分别如图9和图10所示。
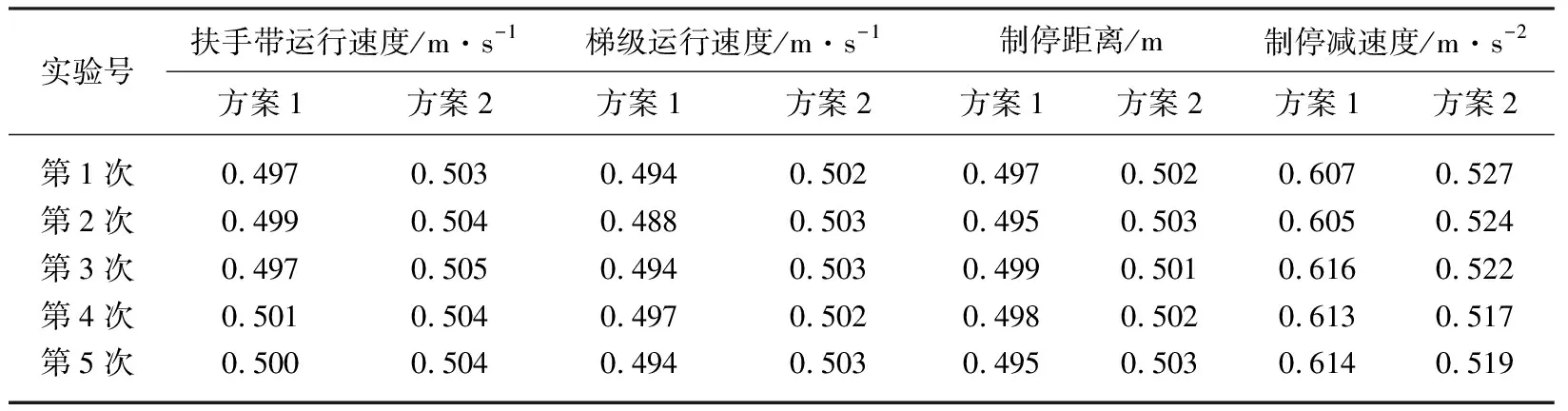
表2 室内自动扶梯两种检测方案检测结果
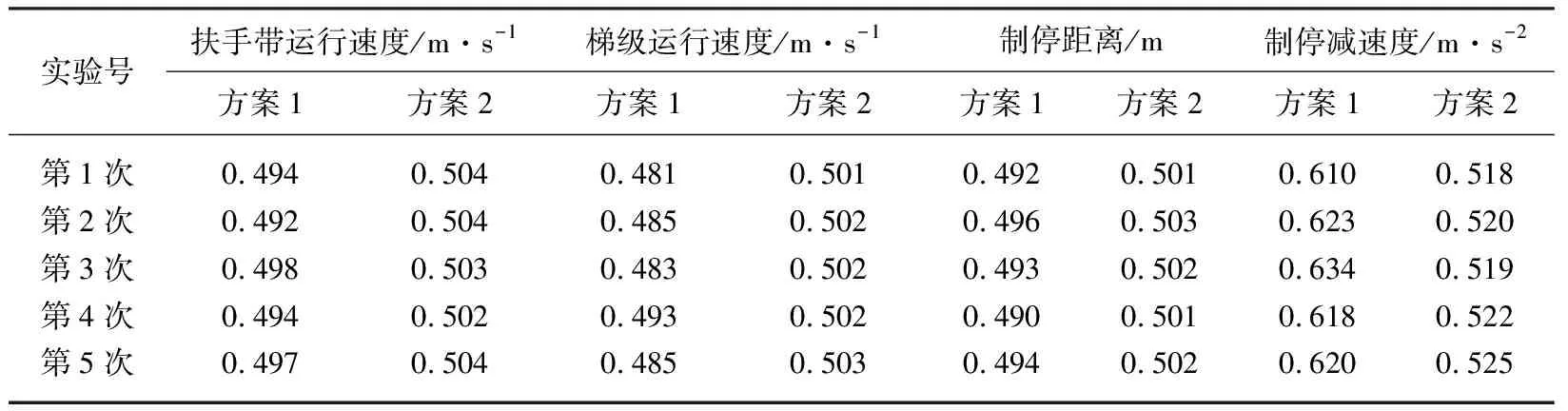
表3 室外自动扶梯两种检测方案检测结果
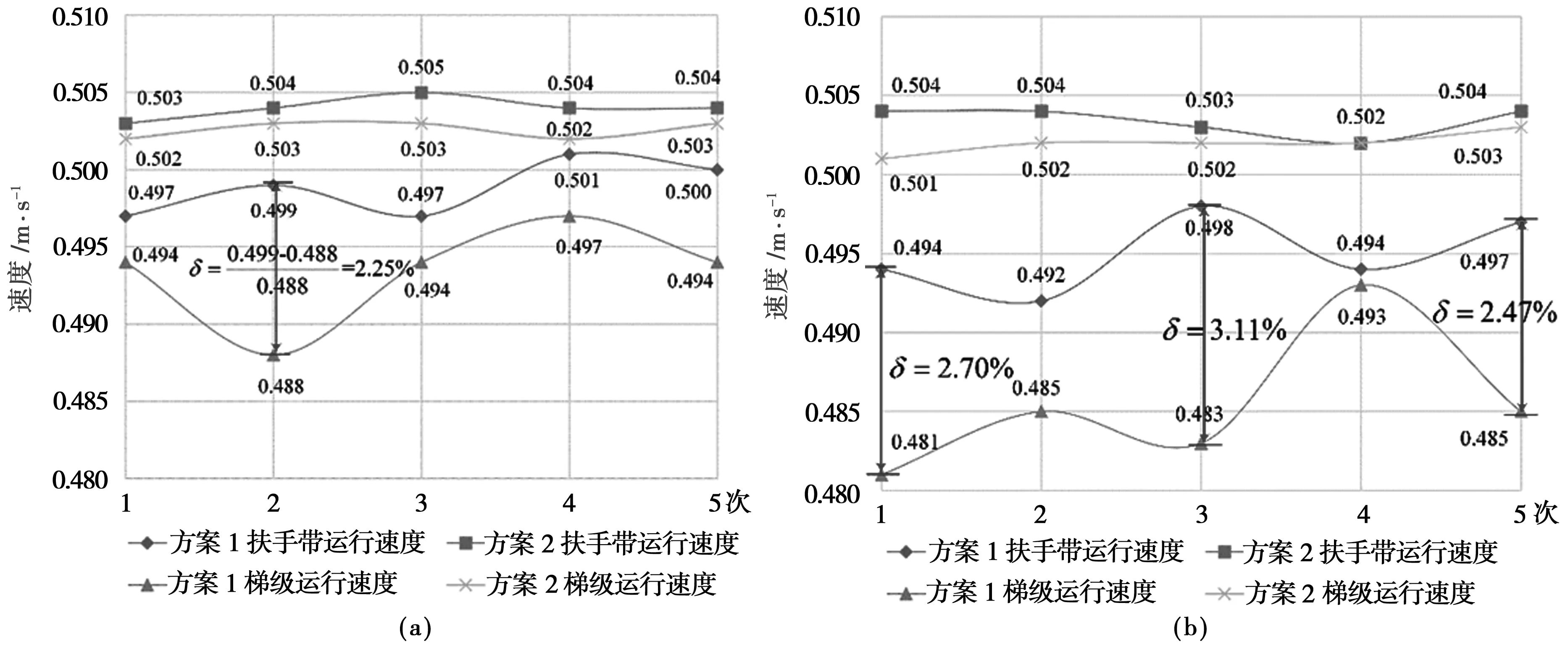
图9 两种检测方案所得扶手带运行速度、梯级运行速度曲线
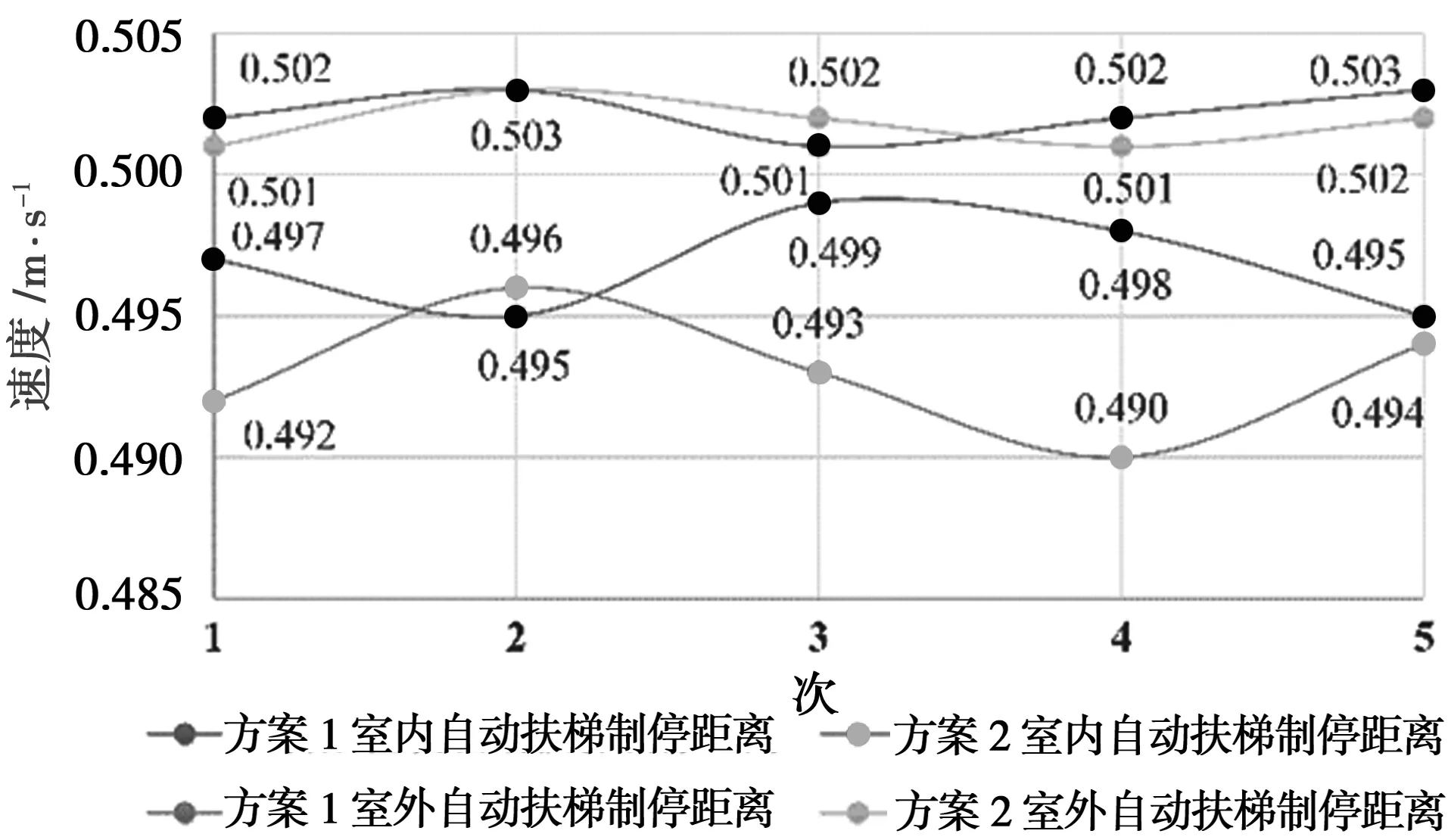
图10 两种检测方案所得自动扶梯制停距离曲线
通过对比表2和表3所得检测结果以及图9和图10所示检测结果对比曲线可以看出,同一台自动扶梯多次检验的结果中,方案2的一致性较好,而方案1的各参数检测结果存在较大波动;对于参数相同的室内、室外两台自动扶梯,方案2的两组检测结果一致性较好,而方案1的两组检测结果波动性较大。由于自动扶梯与自动人行道检验规则规定,扶手带的运行速度相对于梯级的实际运行速度允差为0~2%,从图9可知,当采用方案1进行检测时,室内自动扶梯的5次检测中有1次的允差大于2%,室外自动扶梯的5次检测中其允差大于2%的高达3次。因此,当采用方案1进行现场检验时,由于多次检验结果的波动性,检验人员极易给出错误的检测结论,导致不能对自动扶梯的运行质量进行正确评估,安全隐患不能排除。而方案2的检测结果一致性较好,表明该检测方法稳定,检测装置检测精度高。
5 结 语
保障自动扶梯安全运行,构建电梯质量安全体系已经成为社会共识。自动扶梯运行质量检测是评估其运行安全的重要环节,本文针对自动扶梯运行质量检测方法和装置进行了如下研究工作:
(1)针对现有的检测技术误差大、效率低的问题,提出了一种非接触式自动扶梯运行质量检测方法并设计了相应的检测装置。该方法采用非接触的光电反射传感器,设计可快速拆装的吸盘,实现自动扶梯两侧扶手带运行速度的快速检测。采用非接触的反射式激光测距传感器,设计角度可调的反光幕结构,实现梯级运行速度、制停距离和制停减速度快速同步检测。
(2)通过相应的实验对比,结果显示非接触式自动扶梯运行质量检测方法检测过程不受检验现场环境影响,检测精度高,检测结果一致性好。该装置的使用可为自动扶梯的安全评估提供强有力的数据支撑,同时为电梯的维修保养单位、特种设备检测机构、特种设备监察机构提供一种可靠的必备的检验检测仪器。随着特种设备检验检测机构的整合和检测市场的开放,该检测装置具有显著的经济和社会效益,及广阔的应用前景。
猜你喜欢
思维与智慧·上半月(2022年4期)2022-04-08
苏州市职业大学学报(2021年3期)2021-10-19
商品与质量(2021年20期)2021-04-22
小聪仔(幼儿版)(2020年12期)2020-02-01
中国特种设备安全(2019年3期)2019-04-22
小学生必读(中年级版)(2019年6期)2019-01-11
中国特种设备安全(2018年10期)2018-12-18
通信电源技术(2018年3期)2018-06-26
好孩子画报(2016年6期)2016-05-14
文理导航·趣味课堂(2016年3期)2016-04-26
