模块化多电平换流器非线性控制策略*
2021-06-22 01:58:32徐晓瑜涂志波
通信技术 2021年6期
徐晓瑜,陈 焰,涂志波,孙 玲,王 方
(1.昆明理工大学,云南 昆明 650500;2.玉溪师范学院,云南 玉溪 653100)
0 引言
作为一种新型电压源型换流器,模块化多电平换流器(Modular Multilevel Converter,MMC)具备谐波特性好、可独立控制有功无功以及易于扩展等优点,在柔性直流输电领域得到了广泛关注,有着广阔的应用前景。
目前,国内外关于MMC 的研究主要针对MMC的拓扑及其仿真、控制与调制策略、换流器产生的子模块均压问题、环流抑制等方面。文献[1]中分析了MMC-HVDC 系统的拓扑结构,详细推导了dq坐标轴下的MMC 数学模型,并给出了双闭环控制策略。文献[2]给出了MMC 欧拉-拉格朗日模型,详细论证了MMC 的无源性,并给出了MMC 无源控制系统的设计。文献[3]介绍了载波移相调制(Carrier Phase Shift-Sinusoidal Pulse Width Modulation,CPSSPWM)和最近电平逼近(Nearest Level Modulation,NLM)两种调制策略,分析了相应调制方式下的子模块均压策略,对3 种调制技术进行了对比。实验结果表明,载波移相调制开关频率更低,损耗更小,输出谐波以高次谐波为主,谐波总畸变率更低。文献[4]研究了载波移相调制下移相角与输出电平数的关系,除了传统的N+1 电平输出电压,改变相移角度还可实现MMC 的2N+1 电平输出,使得换流器的性能发生变化。文中具体分析了两种调制方式的规律,并给出了相应的实现方法。文献[5]分析了移相角与输出电压谐波的变化规律,其中移相角可改变输出的电平数而不增加器件数量。相间环流是影响换流器传输性能的一个关键问题。文献[6]提出一种环流抑制器。与以往需要坐标系变换和各相解耦不同,该控制策略独立抑制每相环流中的二倍频分量,适用于其他单相或四线制系统,实现更简便。
本文的主要内容将围绕MMC 的拓扑及原理、系统级非线性控制策略、调制策略和环流抑制4 方面展开,并利用Matlab 进一步对比了N+1 和2N+1电平下换流器性能。仿真结果表明,所提控制策略具有可行性。
1 MMC 拓扑结构及数学模型
1.1 MMC 拓扑结构
为了研究MMC-HVDC 系统控制策略,先分析MMC 拓扑特点及其数学模型。典型N+1 电平的MMC 拓扑简化电路如图1 所示。每相包含上下两个桥臂,每个桥臂有N个子模块(Sub-Module,SM)级联。子模块一般采用半桥结构。
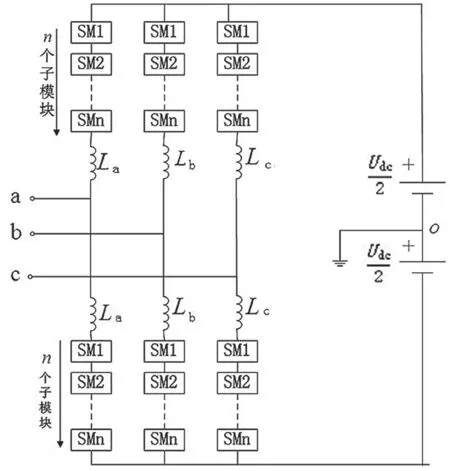
图1 MMC 拓扑简化电路
1.2 MMC 数学模型
MMC 各相结构对称,等效电路如图2 所示。
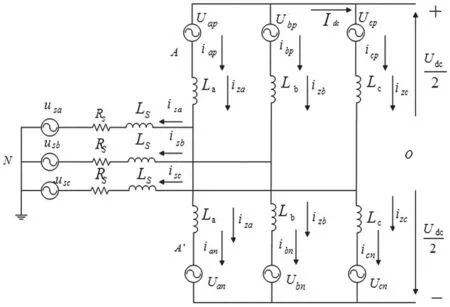
图2 MMC 等效电路
三相静止坐标系下MMC 的数学模型为:
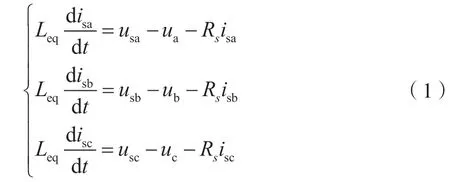
通过分析上述模型,发现三相abc 静止坐标系下各物理量都是随时间交变的,不利于传统的系统级控制和有功功率、无功功率的独立调节。因此,该模型需经过变换到两相坐标系中。
从三相abc 静止坐标系到两相αβ静止坐标系的变换称为Clark 变换,变换矩阵记为C3s/2s。从两相αβ静止坐标系到两相任意旋转dq坐标系的变换为Park 变换,变换矩阵记为C3s/2r。最终,可得从abc坐标系到dq坐标系的3s/2r变换关系为:
用C3s/2r矩阵左乘式(1)表示出的矩阵模型,可得:
将式(3)展开,有:
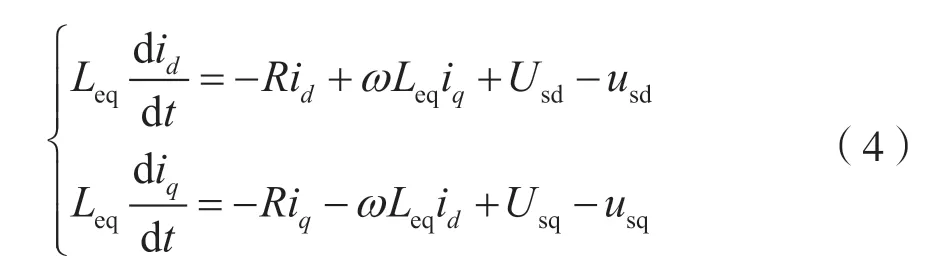
式(4)就是MMC 换流器在dq旋转坐标系下的解析模型。
2 MMC-HVDC 系统控制策略
2.1 系统的控制流程
MMC-HVDC 控制系统结构,如图3 所示。系统级控制的主要目的是达到给定,通过对设定值的计算产生下一级控制器所需的参考值。这一层在传统双闭环控制中由外环完成。换流站级控制主要接收上一级输出的参考量,经过调节产生下级需要的调制波,由内环完成。换流阀级控制在所给调制波上叠加均压、环流抑制产生的压降分量,再使用适当的调制策略产生开关器件所需的脉冲触发信号。

图3 MMC-HVDC 控制系统结构
本文中采用直接电流控制,也称矢量控制。通过直接对输出电流指令信号进行处理,引入直接电流的反馈控制回路,可以实现对电流瞬时值的快速跟踪,控制精确、稳态特性好且响应迅速。系统的控制框图见图4。外环输入有功物理量和无功物理量,经过锁相、PI 调节分别生成d轴和q轴电流参考值作为内环电流给定。内环采用无源控制器,计算参考值与实际值的误差,经过解耦控制、坐标变换得到三相静止坐标系下的调制波。阀控制的核心调制策略用载波移相调制策略。
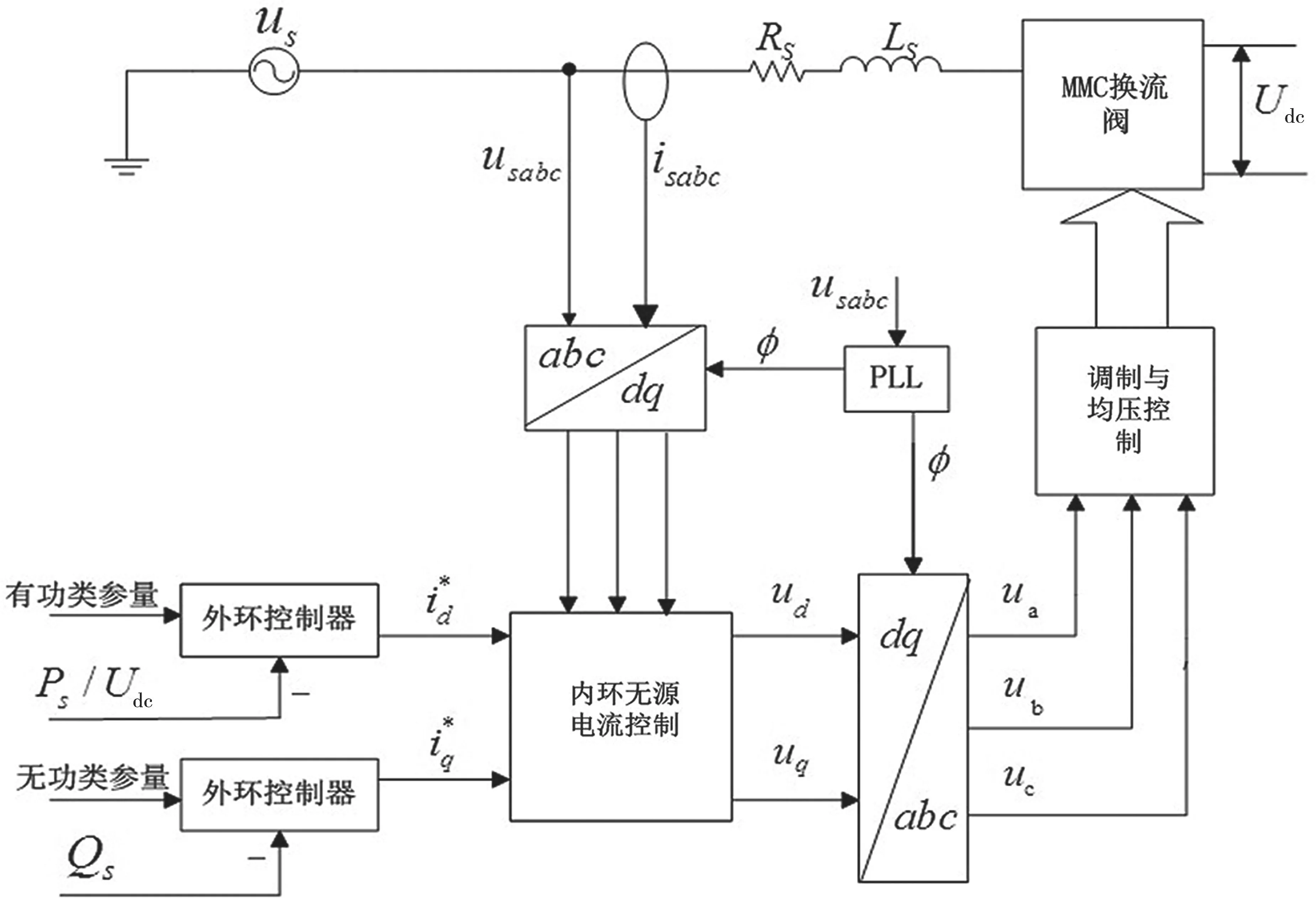
图4 系统的控制原理
2.2 基于无源控制的内环控制器
MMC 的控制性能与电流内环控制器的设计关系紧密。由MMC 数学模型的分析可知,MMCHVDC 系统是一个多变量、强耦合的非线性系统。一般线性系统的控制方法很难达到控制要求。
无源控制以其能够实现系统的全局稳定性、对外界扰动和参数的变化具有较强的鲁棒性等特点,成为研究非线性系统的有效方法。
(1)MMC 的欧拉-拉格朗日(Euler-Lagrange,EL)系统模型
根据非线性无源控制理论,可以将式(3)改写为:
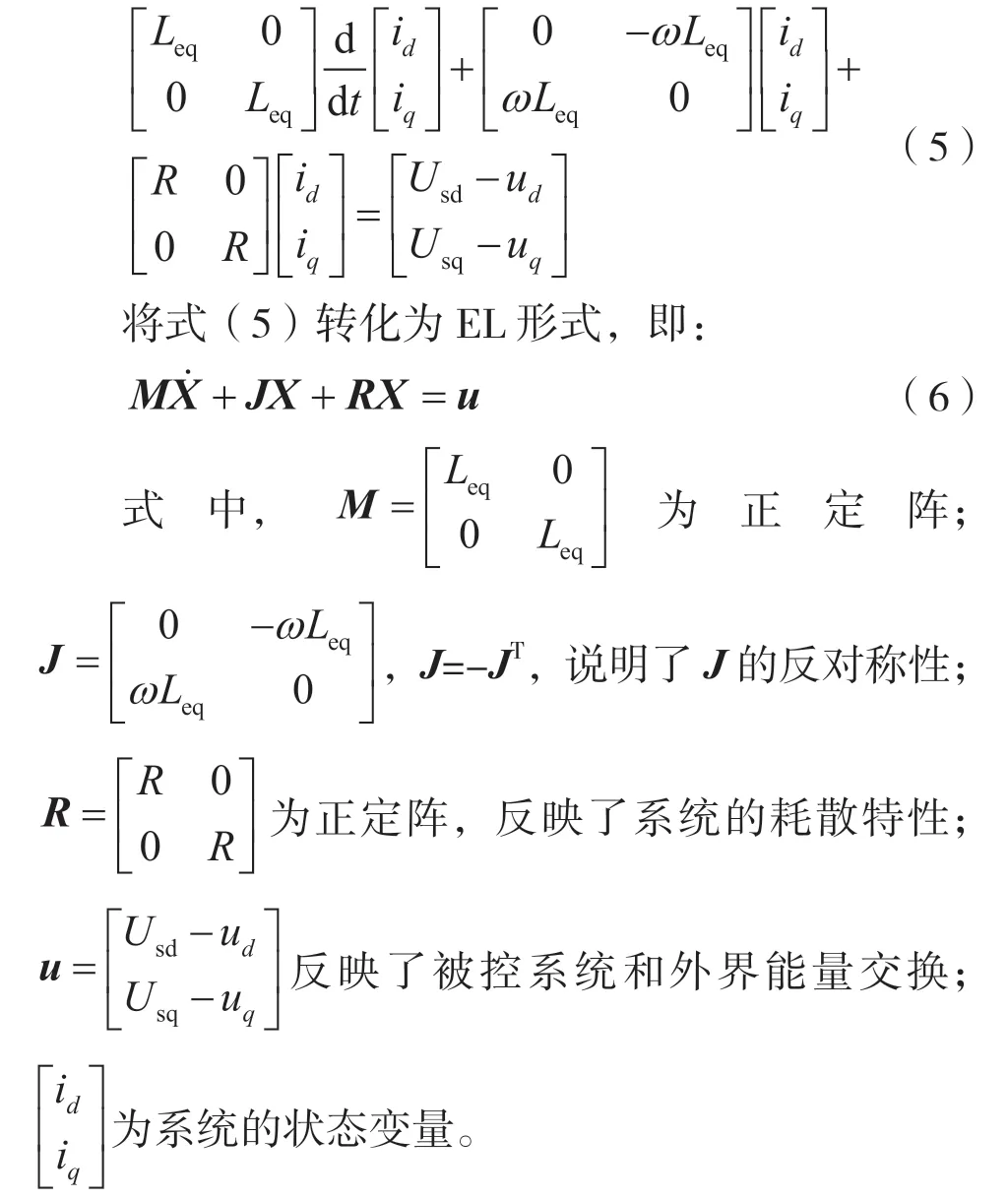
(2)MMC 的无源性
定义正定函数Q(x)、正定能量存储函数V(x),系统的输入、输出分别记为u、y,能量供给率为uTy。
对于一个多输入多输出系统,若存在V(x)、Q(x),对∀T>0 使得耗散不等式:
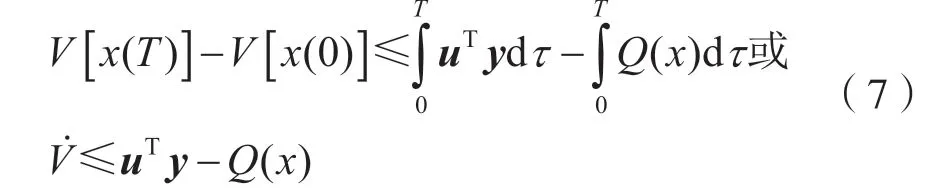
式(7)对u、y、uTy均成立,则系统是严格无源的。
对于三相MMC,设系统的能量存储函数为:

对V求导,由式(5)可得:

(3)MMC 无源控制器设计
MMC 系统稳态运行的目标是有功功率、无功功率和交流电压跟随相应的给定值,因此系统期望的稳定平衡点为:

建立误差系统,令:

式中,x*为系统期望平衡点。
将式(11)代入式(6),可得系统误差动力学方程为:

向系统注入合适的阻尼,能加速系统额外能量的耗散,以此保证系统快速收敛到给定状态,使Verr调节到0。
注入阻尼的耗散项为:

式中:Rd为系统阻尼矩阵;Ra为待注入的阻尼矩阵,为正定矩阵,其中Ra1>0、Ra2>0。
将式(14)代入式(13),重新列写得到注入阻尼的误差方程为:

为消除稳态误差,实现解耦控制,选无源控制规律为:

则MMC 无源控制器表达式为:

MMC 无源控制器的控制框图如图5 所示。
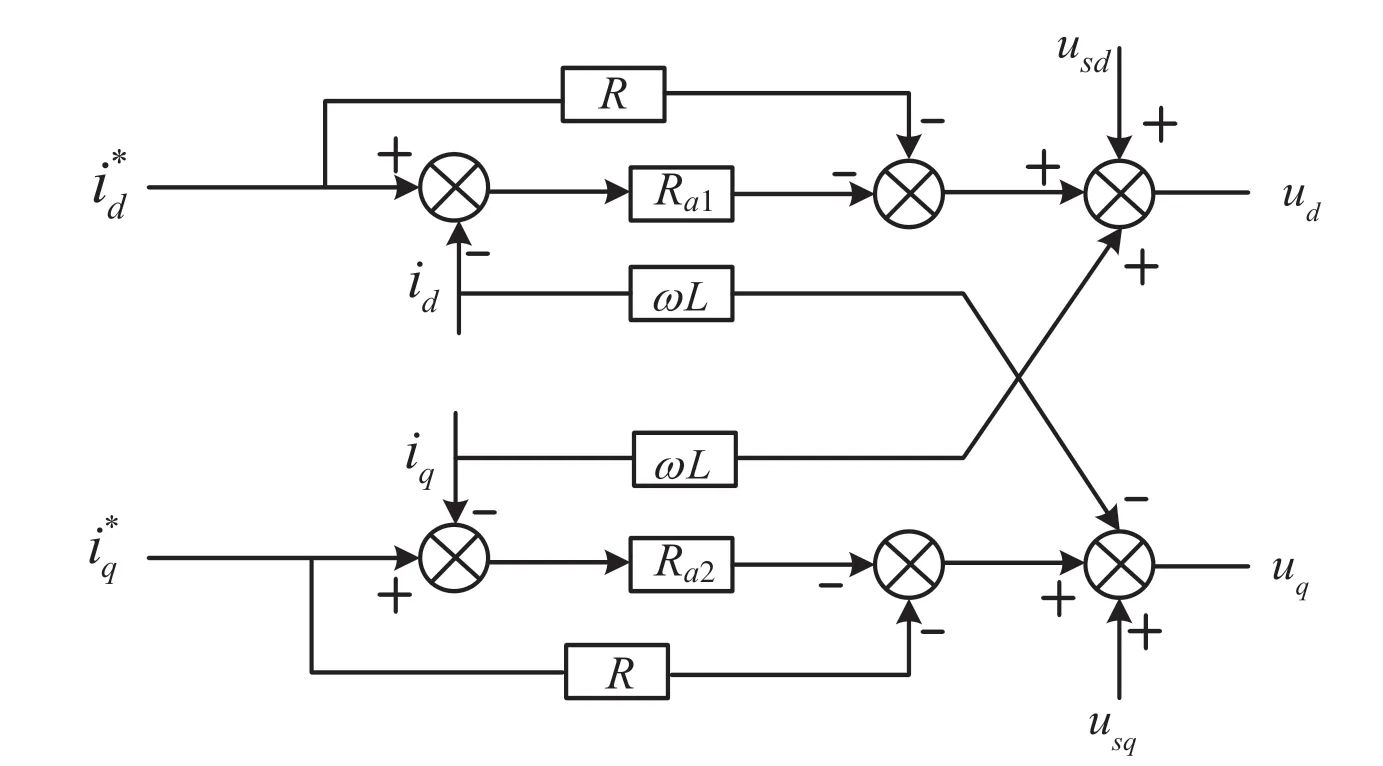
图5 MMC 无源控制器
采用无源控制,注入阻尼的参数大小Ra1、Ra2是影响MMC 控制性能的关键,因此综合控制效果和对换流器的影响,本文选取Ra1=Ra2=100 Ω。
2.3 MMC 调制策略研究
(1)常用的是最近电平逼近(NLM)和载波移相脉宽(CPS-SPWM)两种调制策略。本文使用的仿真模型SM 数为1~10,因此重点研究载波移相调制技术。
(2)子模块电容电压的均衡是换流器稳定运行的关键环节。由于本章侧重研究载波移相调制策略对换流器的影响,因此简化仿真条件,假定每个桥臂的子模块直流电压已经达到期望值。
在载波移相调制(CPS-SPWM)技术中,由于移相角的不同,决定了某时刻上下桥臂投入的子模块数不同,因而输出电平数也发生了变化。定义移相角θ为下桥臂子模块载波相对上桥臂的延迟角,则可总结出以下规律:

2.4 环流抑制策略
三相MMC 装置在实际运行时,由于子模块电容反复的充放电,其电压不会时刻保持均衡,因此产生环流抑制,所以加以抑制。本系统采用准比例谐振(Quasi Proportional Resonance,QPR)控制器。
准比例谐振抑制器的传递函数为:

式中,Kp为控制器的比例系数,KR为谐振系数,ω0谐振频率,ωc截止频率。根据式(20)设计QPR 控制器的控制框图,如图6 所示。
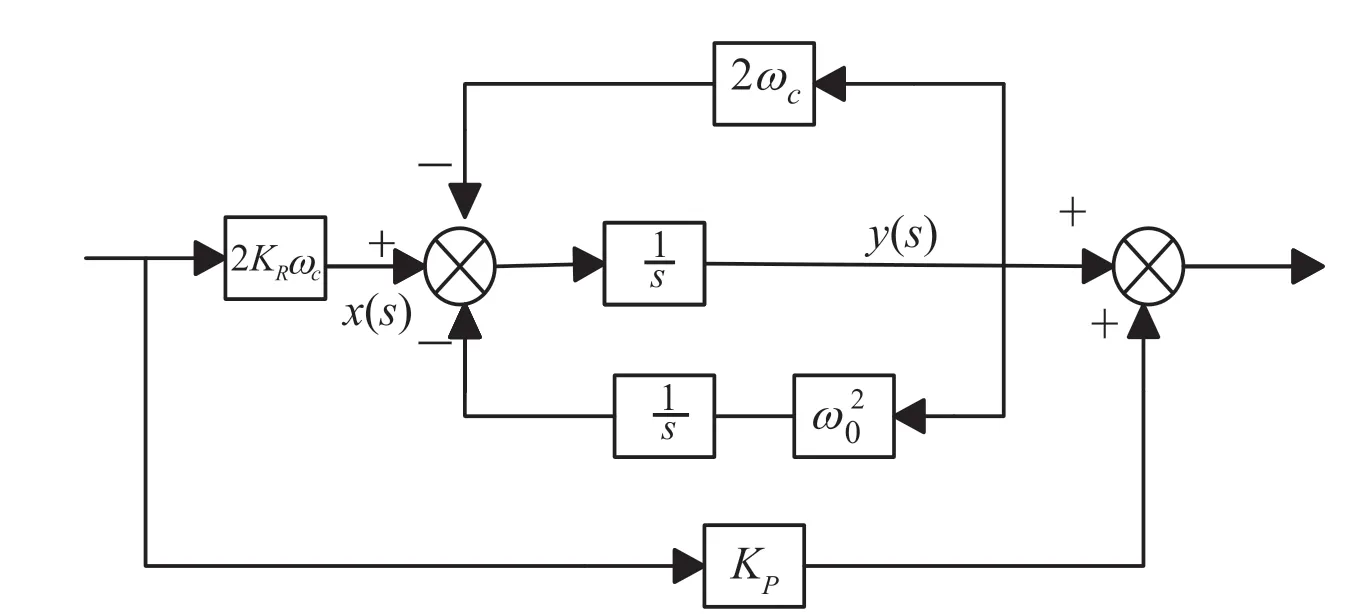
图6 准PR 控制器实现
3 总体仿真及对比分析
前面分模块介绍了MMC 的控制系统和环流抑制机制,为了比较传统N+1 电平和改进2N+1 电平调制方法的差异,验证无源控制理论的可行性,在Matlab/Simulink 中搭建三相4SM 并网逆变模型。外环图7 是MMC 主电路,仿真参数如表1 所示。
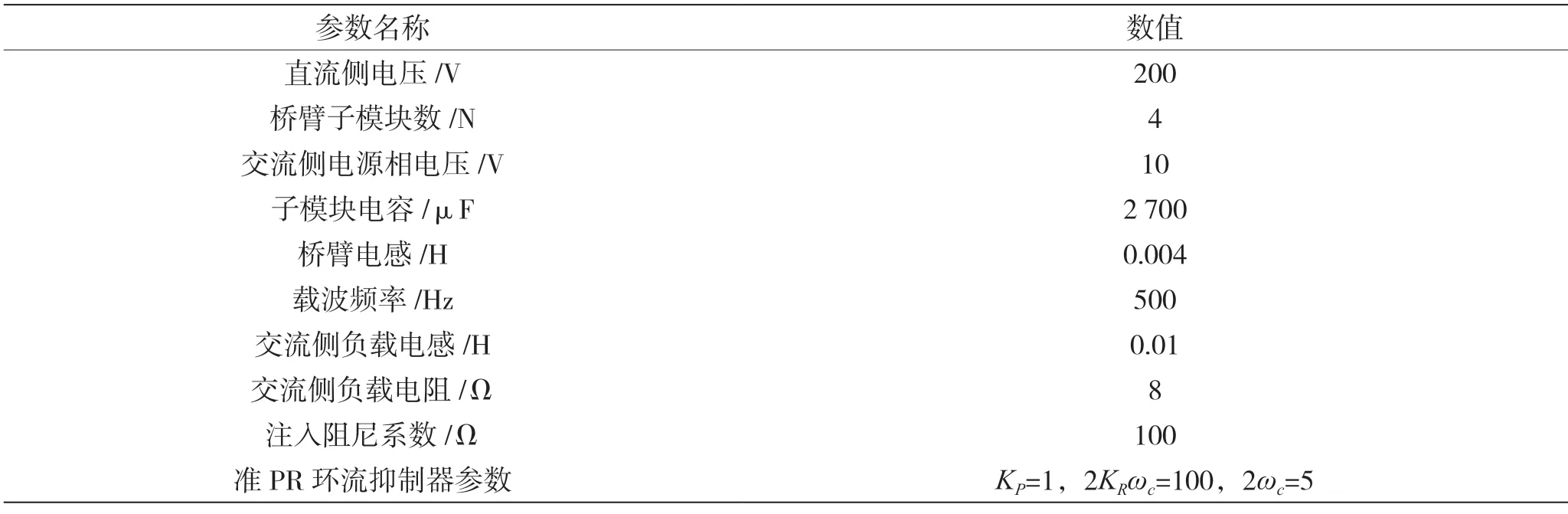
表1 三相MMC 并网仿真参数
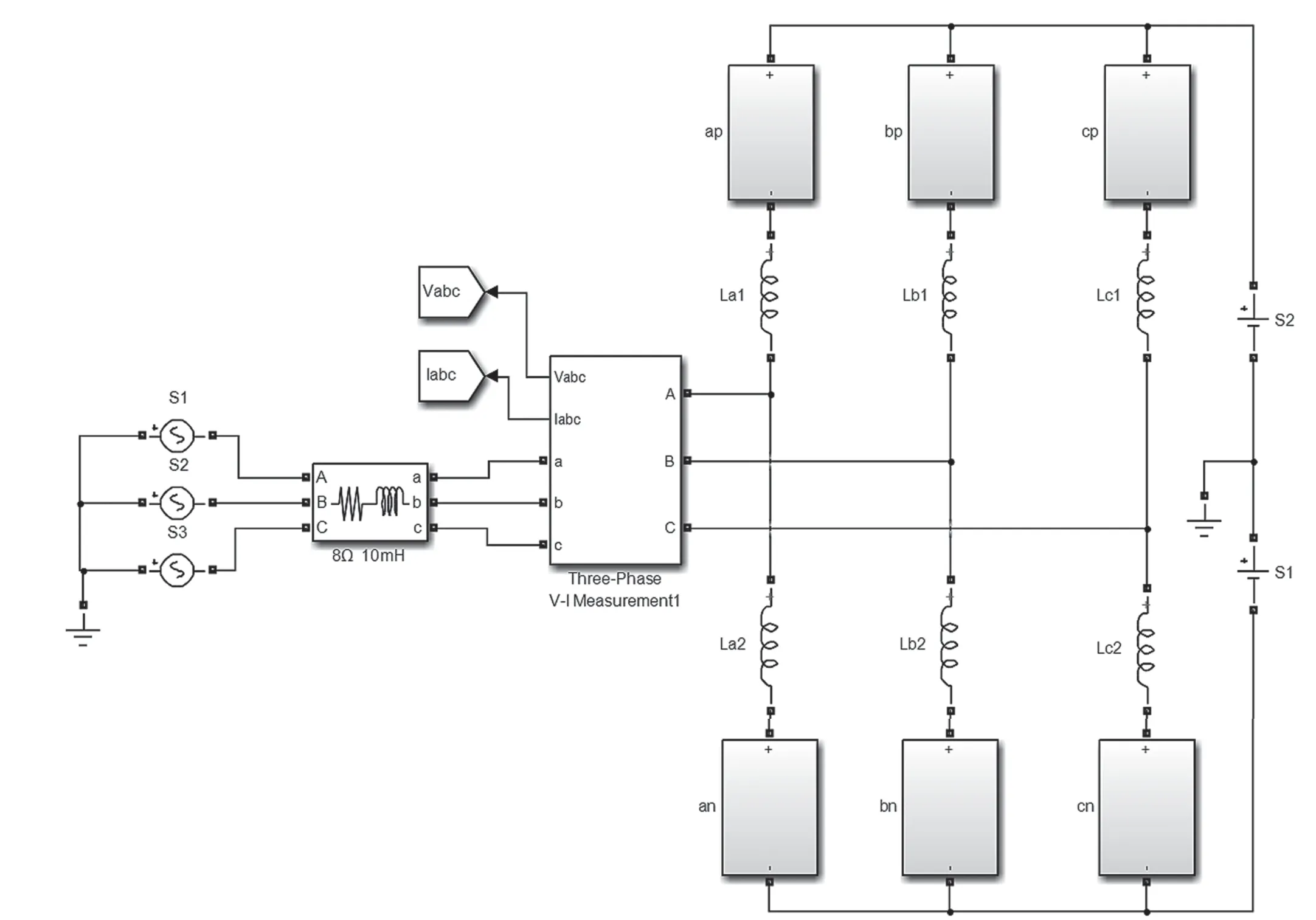
图7 三相并网MMC 逆变电路
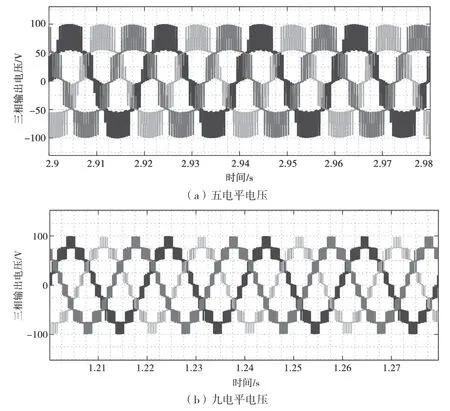
图8 输出三相电压
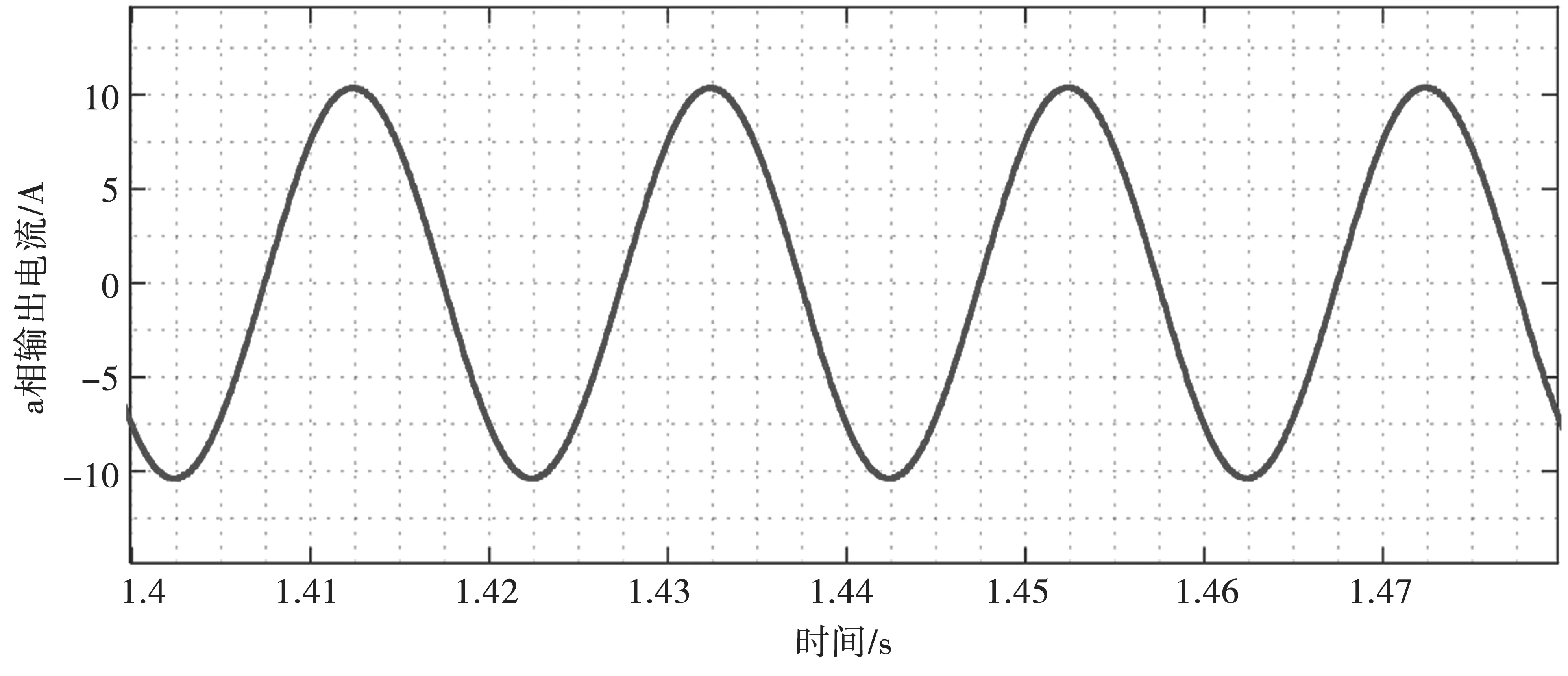
图9 输出三相电流
以a 相为例,图8(a)、图8(b)是五电平和九电平输出电压波形。环流抑制前后,五电平输出电压THD由30.23&降至26.49&,桥臂电流THD由31.85&降低至6.18&;九电平输出电压THD基本保持在14.7&,桥臂电流THD由31.04&降低至9.70&。图9 为一相输出电流波形,两种电平数下的输出电流正弦度均很高,九电平的波形杂波成分更少。图10 为环流抑制效果,两方法均能在投入环流抑制器后0.5 s 内实现抑制,证实了环流抑制策略的快速性。对比图10(a)和图10(b),由于九电平模型桥臂电流畸变更加严重,抑制之后环流中的杂波成分仍较多,因而五电平的抑制效果更显著。
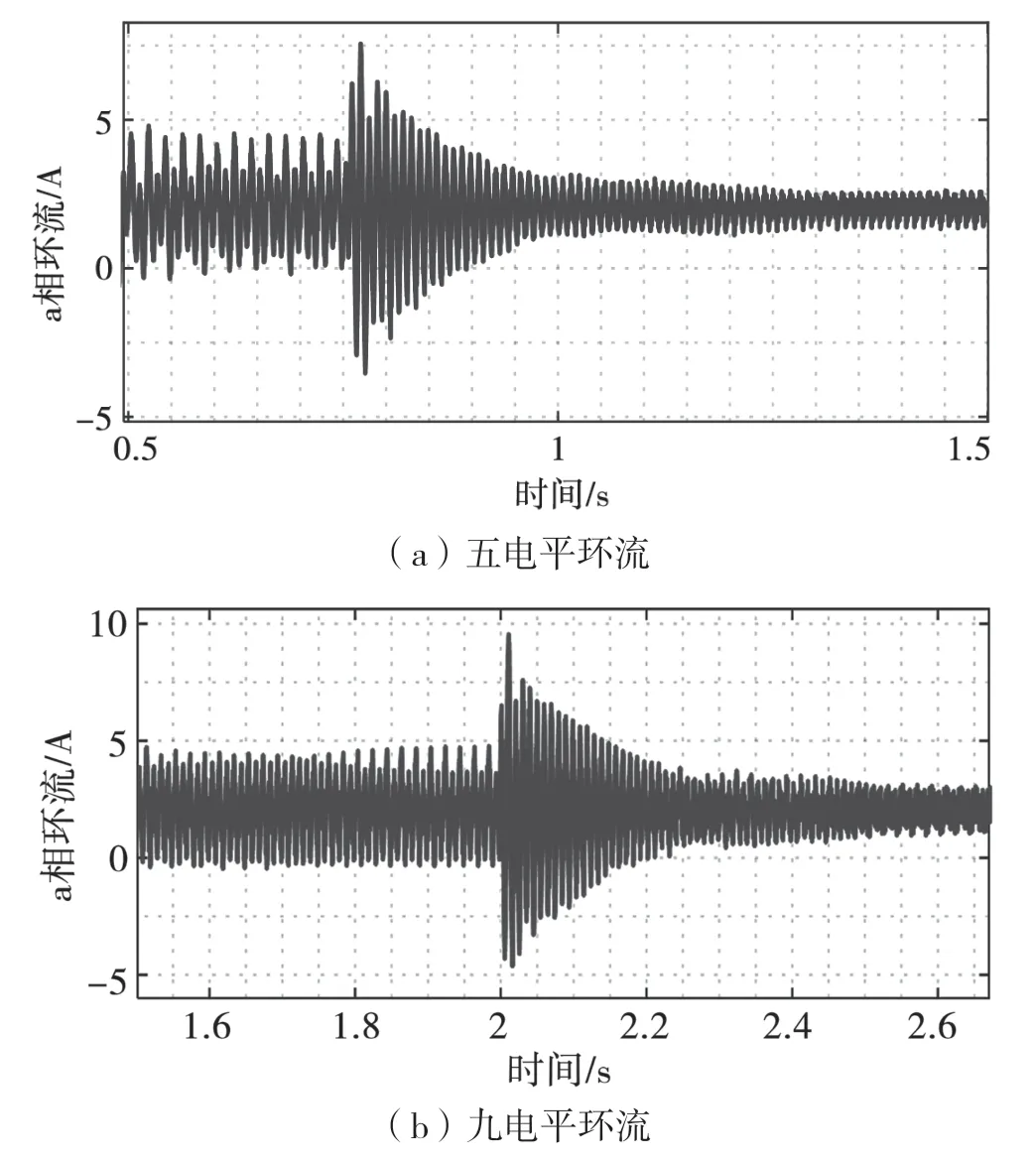
图10 环流抑制效果
从整体仿真效果来看,加入无源控制器实现了对阀级以上系统的有效控制,一方面能快速调节好环流,减小环流抑制器投入瞬间大幅波动,另一方面使稳态误差维持在较小范围内,促使换流器达到期望的功率传输。
4 结语
通过围绕MMC 的拓扑及原理、系统级非线性控制策略、调制策略和环流抑制4 方面展开分析,利用Matlab 进一步对比了N+1 和2N+1 电平下换流器性能,验证了所提控制策略的可行性。
猜你喜欢
粮食问题研究(2022年2期)2022-04-25 22:50:57
电子制作(2019年12期)2019-07-16 08:45:14
电子制作(2019年11期)2019-07-04 00:34:54
数学物理学报(2018年2期)2018-05-14 07:32:01
北京航空航天大学学报(2017年6期)2017-11-23 05:57:06
儿童故事画报·智力大王(2016年6期)2016-09-14 07:12:55
互联网天地(2016年2期)2016-05-04 04:03:23
通信电源技术(2016年5期)2016-03-22 01:10:10
中国学术期刊文摘(2016年2期)2016-02-13 16:01:41
电测与仪表(2015年13期)2015-04-09 11:57:34