
无人机低空摄影测量数据处理及应用探讨
2021-06-19 07:51周玉秀申忠昌王永菊
青海大学学报 2021年3期
周玉秀,申忠昌,王永菊
(1.青海省基础测绘院,青海 西宁 810001; 2.青海地理信息产业发展有限公司,青海 西宁 810001)
近年来,无人机市场发展繁荣,测绘市场体量巨大,受国家对测绘装备现代化重视程度提高、4D成果数据提供量持续大幅度增长影响,无人机测量技术超越传统测量技术,成为主流测绘方式之一[1]。无人机作为目前获取空间数据的重要测量手段,具有机动灵活、操作简便、快速响应、成图精度高、产品丰富等优点[2]。Kim等[3]利用无人机技术在潮滩空间信息获取及管理的研究中肯定了无人机测量技术的优势,并表示无人机低空摄影测量由于测绘目的不同,测量技术方法应差异化;王春年等[4]对无人机测绘技术与三维激光扫描技术获取高精度DEM及DOM进行研究,结果表明受机载相机、飞机航线、影像像幅小及数据处理软件等因素影响,DEM高程精度不佳。鉴于此,本文以某高原地区为例进行实验,采用无人机获取影像数据,利用数据处理软件,通过航带拼接、空三加密、生成DSM等流程,快速获取DEM高程数据和DLG数字线划图,从而简化数据处理流程,提高数据成果精度,对无人机在高海拔山区的测绘应用具有重要意义。
1 研究区概况
研究区位于青海省德令哈市境内,石底泉滩西南部,地理坐标为东经95°51′22″~95°54′51″,北纬37°36′38″~37°37′46″。测区东西长5 km,南北宽约1 km,海拔在3 830~3 993 m,测区内山形陡峻,沟壑纵横,岩石多裸露,山脊多风化成沙砾陡坡,大部为荒山沟谷,植被极少,气候干燥,缺氧量较严重,人工施测略有难度。
2 无人机航空摄影关键技术
本研究中,无人机数据影像用于制作1∶2 000大比例尺地形图及相关数字产品,结合测区实际地形、勘察结果将对测区进行航线规划、分区航摄,并选择晴朗无风的时间段进行航测[5-6]。本研究技术路线如图1所示。
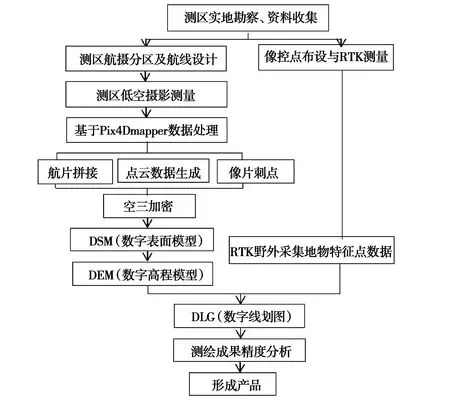
图1 技术路线图Fig.1 Technology roadmap
2.1 航摄分区及航线设计
航摄分区应保证航摄范围内获取的影像能达到指定的地面分辨率、航向重叠度或旁向重叠度,并遵循分区界线与图廓线保持一致;分区内地形高差不大于1/6摄影航高;在航线和高差都符合要求时,分区的面积尽量大一些,保证能覆盖整个测区的原则[7]。其中摄影航高的计算公式[8]如下:
(1)
式中:H为摄影航高理论值(m),f为镜头焦距(mm),GSD为地面分辨率(m),a为像元尺寸(um)。
本研究中无人机镜头焦距为24 mm,地面分辨率为0.15 m,像元尺寸为12 um,由此计算得出理论飞行航高为300 m。根据国家民航局对无人机云系统运行场景分类及数据规范代码表,规定航空器处于驾驶员或观测员目视视距内半径500 m,相对高度低于120 m的区域内,参考GB/T 7931—2008《1∶500 1∶1 000 1∶2 000地形图航空摄影测量外业规范》[9]标准,结合无人机设备性能限制,以及测区高差,实际飞行航高设置为120 m。
在航线规划时,旋翼无人机可在划定的飞行区域内自动规划航线(图2),航线设计完成后需设置航向重叠率、旁向重叠率和航高。依据国家标准CH/Z 3005—2010《低空数字航空摄影规范》[10]要求,结合无人机设备性能及测区地形,采取加大重叠率的方法,选取航向重叠率为80%,旁向重叠率为70%。测量过程中飞行6个架次,每次飞行时间为30分钟。

图2 航线规划图Fig.2 Route planning map
无人机获取的数据主要有地面像片,POS数据,飞行航线数据,飞行记录文件等类型。每架次航摄作业后,均需对相片数据进行检查并导出POS数据,经检查,除个别影像外,航摄影像色彩均匀清晰,反差适中。
2.2 像控点布设与测量
像控点布设基于CH/Z 3004—2010《低空数字航空摄影测量外业规范》[11],采用区域网布点方法,结合测区地形特点,平面航向基线跨度小于7条,旁向相邻航线跨度小于5条航线,布设于光照条件良好的地方,在航向或旁向5~6张航片重叠范围内。像控点测量采用RTK进行测量,每个像控点测量取三次平均值,以保证准确性和精度。单次观测均在固定解状态下进行,保证测量结果精度,观测历元数不少于20个,各次结果取均值。
2.3 无人机数据处理
本研究采用Pix4Dmapper数据处理软件[12]对无人机数据和航空影像进行处理。在软件中创建新项目,添加所有架次的航摄影像,利用软件的“快速拼接”功能完成测区影像拼接。如图3所示,照片导入后,需选择数据输出的基准面,通过软件可快速拼接得到完整测区影像图,需检查该图是否覆盖整个测区,确认覆盖目标区域完全后方可进行下一步数据处理。
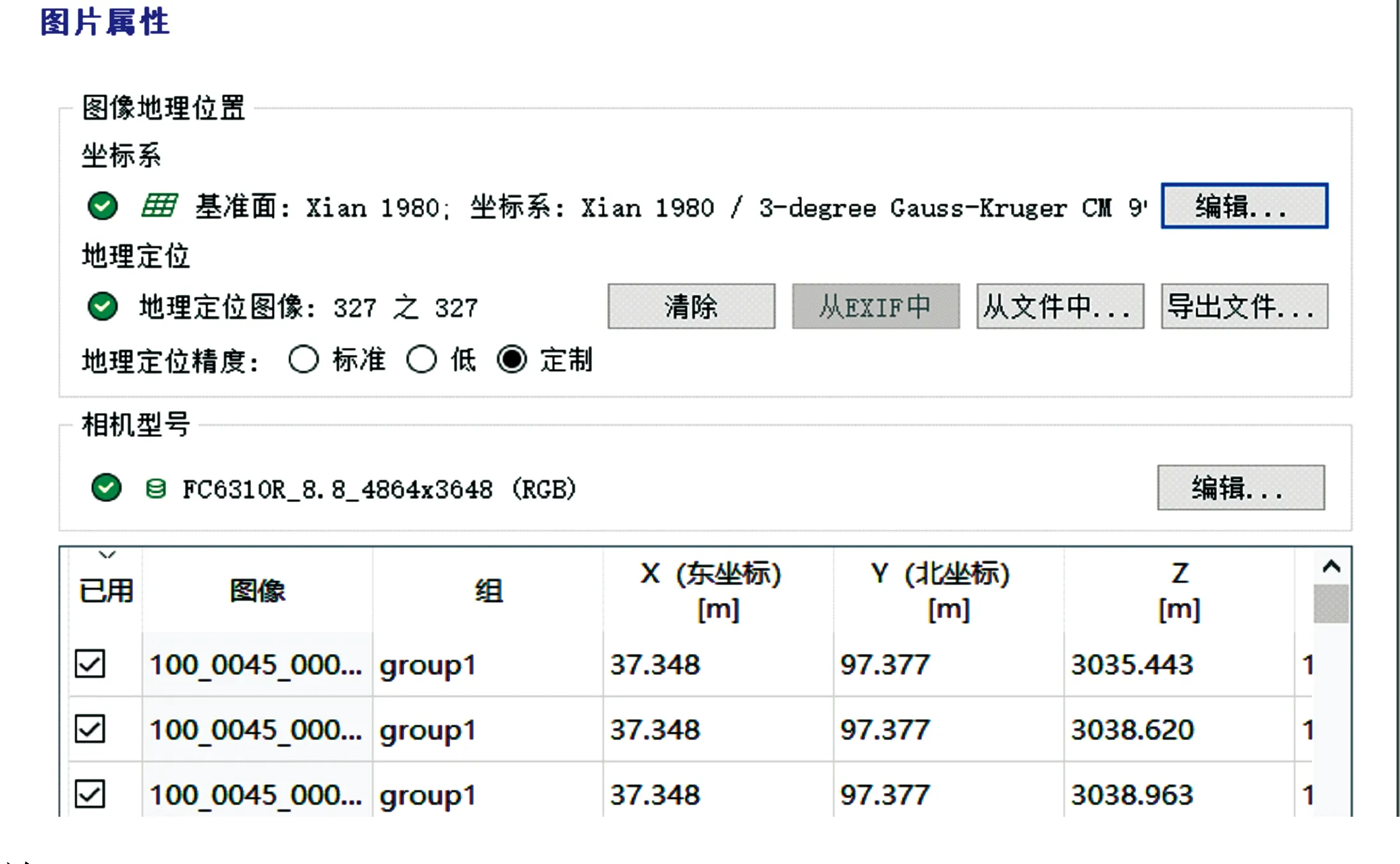
图3 数据拼接过程Fig.3 Data splicing process
完成影像拼接后,在项目中选择GCP/MTP管理,导入像控点数据,坐标顺序选择X、Y、Z,依次对包含各个像控点的航片进行刺点,每个像控点至少选三张清晰度较高的航片进行刺点(图4)。
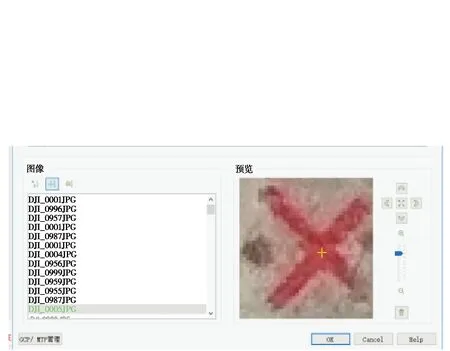
图4 像片刺点Fig.4 Photo prick
刺点完成后,如图5所示,需利用软件的空三射线功能对数据进行处理,以求解所有加密点的地面坐标及像片方位元素。方便后续影像数据的生成。
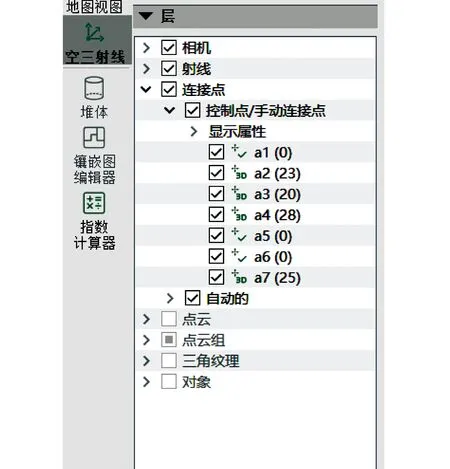
图5 空三加密Fig.5 Aerial triangulation
数据处理软件可基于处理后的数据快捷生成DSM(数字表面模型),DSM是在DEM基础上添加了除地面以外的其他地表信息高程数据,例如地表建筑物、桥梁、树木等,测区内包含少量的房屋。基于测区的DSM数据利用软件的点云、纹理、正射影像和指数处理功能,生成点dxf格式的云数据、数字表面模型及正射影像。在软件中加载点云数据,通过点云编辑将房屋点云数据删除,重新生成即可得到测区DEM数据,如图6所示。根据需要将多余的高程点过滤,建立DTM,并绘制等高线。对不合理的等高线进行删除,并导入野外测量点,进行房屋、道路等地物要素的绘制,并用不同颜色进行修饰与区分,最终得到测区DLG数字线划图。
3测绘成果精度分析
由表1可得,平面X方向上最大误差为0.092 m,Y方向上最大误差为0.090 m,根据点位中误差公式求得平面位置中误差为0.032 m。根据相关规范[15]检查点平面位置中误差允许值为±0.100 m,该结果满足1∶2 000比例尺测图要求。
利用DEM数据通过内插方法获取特征点的高程作为测量值,以RTK测量的地面特征点的高程为真值,计算高程检查点的误差值ΔH(表2)。基于检查点高程信息,结合点位中误差计算公式求得高程中误差为-0.058 m,该结果够满足规范[15]中规定的高程中误差:±0.200 m(山地)、±0.250 m(高山地)。
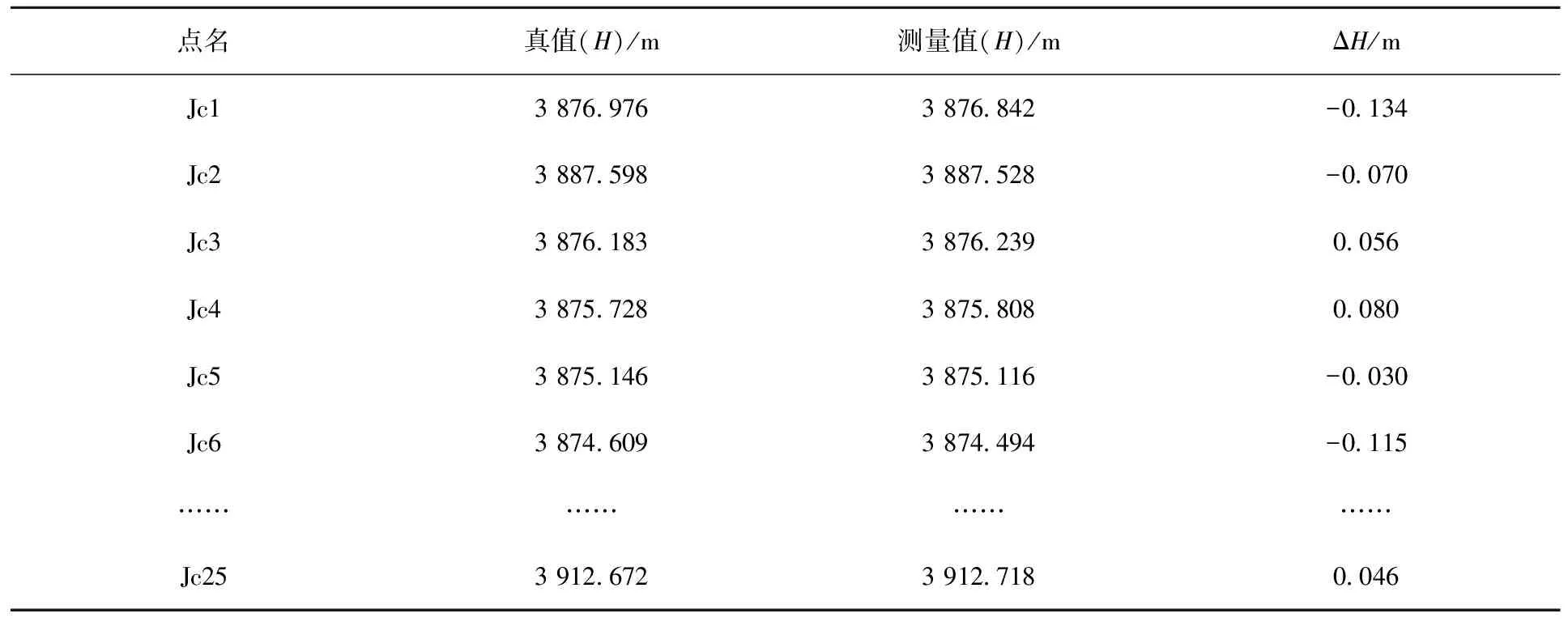
表2 高程检查点误差
测绘成果精度计算结果证明检查点平面位置中误差和高程中误差均满足制作1∶2 000比例尺数字线划图的规范要求及3D产品的生产需求。
4 讨论与结论
本文结合实际案例,以海拔3 800 m区域为测区,验证了无人机低空摄影软件内业处理的作业模式在高原区域大比例尺地形图测量的可行性。研究结果表明:测绘成果平面位置中误差为0.032 m,高程中误差为-0.058 m,均符合规范的精度要求。DSM、DEM、DLG等3D产品生产效率有所提高,完全满足1∶2 000大比例尺地形图的各类要求。可为高原山地测区无人机低空摄影测量工作提供一定的理论价值和参考。相涛等[13]仅对Pix4Dmapper软件生成数据的精度进行了分析,并未进一步的获取大比例尺地形图数据;董明辉[14]采用了多软件对数据进行处理,未提及到数据处理的精度。相比而言,本研究中数据处理流程相对简洁,数据处理时间更短。但由于测区环境不同,本次研究对不同测区不具有普适性,未来将结合不同测区环境进行无人机低空摄影测量数据处理普适性技术进行研究。
无人机低空摄影测量作为目前的研究热点和测量工具,广泛用于各个领域,今后高原区域各类基于无人机测量的研究和工作也将日趋完善。无人机的技术可行性会越来越大,工作效率越来越高。
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01
心理学报(2022年4期)2022-04-12
资源信息与工程(2021年5期)2022-01-15
能源工程(2021年6期)2022-01-06
建材发展导向(2021年12期)2021-07-22
建材发展导向(2021年2期)2021-03-02
当代陕西(2020年23期)2021-01-07
世界有色金属(2020年10期)2020-12-09
世界有色金属(2020年12期)2020-09-03
消费导刊(2017年8期)2018-01-18
