一种基于雷达组网的雷达标校方法
2021-06-16 16:42陈宇祺李飞
电子技术与软件工程 2021年4期
陈宇祺 李飞
(中国兵器工业第二〇六研究所 陕西省西安市 710100)
1 引言
雷达组网后,每部雷达不再是独立的站点,而是组网中的一个节点,为联系各个节点协调工作,各部雷达必须在时域、空域等方面协调一致工作。每部雷达天线的扫描通常是完全异步的,需采用统一的时间标准,因此在雷达组网时,时间基准信号的严格统一是雷达组网的前提条件,本文采用站间授时结合站内守时的方法完成时间基准的严格统一[1]。雷达网中各站的精确定位和空间几何标校是对目标定位的基础,由于地球曲率的影响,在坐标转换中如果误差过大,将形成系统误差对后端雷达数据融合带来影响。本方法采用卫星定位获得各站精确地理位置并统一进行地物指北角标定实现空间几何标校[2]。
2 站间时间同步的实现
雷达在对空中目标进行搜索跟踪时,需要外接卫星定位系统完成自身独立授时,卫星定位系统以高数据更新率向雷达中心控制计算机发送时间信息,包含时、分、秒以及毫秒信息。中心控制计算机在收到时间信息后,对自身内部时间实时更新,完成自身时间同步。
在某防空雷达演示验证项目中,时间基准信息由指控系统通过网络UDP 数据包发送。受限于指控系统授时信息内容,只能得到指控系统自身的时、分、秒信息,其时间源无法给出毫秒级时间信息,因此雷达站点需要在接收其时间基准信息后通过自身守时装置保证上报空情内容中时间信息的准确性。由于雷达中心控制计算机自身软件计时会存在误差以及时间漂移现象,该时间漂移现象随时间积累不断发散,将会给上报给指控系统的空情位置信息引入误差,因此需要采用雷达自身携带卫的星定位系统高稳定性始终来完成时间同步[3],其原理如图1。
指控系统发送时间基准信息至雷达网络接收端口,雷达中心控制计算机根据双方网络数据协议解算出时间基准信息,设接收到的时间基准信息为时(hour),分(min),秒(second),雷达中心控制计算机在获得指控系统时间后,用指控系统时间基准信息中的时、分、秒、毫秒(默认接收毫秒信息为0)信息减去从自身外接卫星定位系统得到的时间信息(时(Hour)、分Min)、秒(Seond)、毫秒(Misecond)),将两者之间的差值补偿给雷达中心控制计算机由外接卫星定位系统接收到的当前时刻时、分、毫秒信息中,接下来将补偿后得到的时间信息设置为雷达中心控制计算机内部时间。
3 雷达标校及数据输出
在对雷达进行空间几何标校时,获得雷达自身准确的指北角对于雷达精确输出目标位置而言十分重要,因此各雷达需对同一大型固定地物进行航向角标定这里采用差分GPS 对雷达航向角进行标校[4]。假定雷达站点所处经纬度为A(LAT1,LON1);大型固定地物(铁塔)所处点位经纬度为B(LAT2,LON2),要求B 点相对A 点的方位角,即求二面角∠C-OA-B。
如图2 所示,∠AOE=LAT1,∠BOF=LAT2,∠EOF=LON2-LON1。
先求∠AOB,由三面角余弦定理可得;

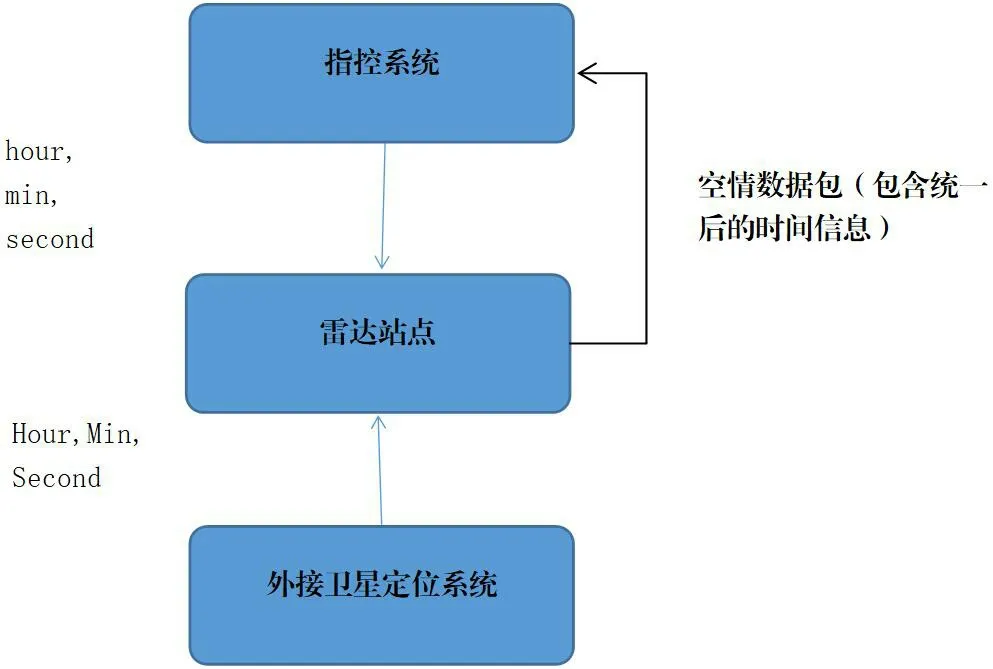
图1:雷达指控系统时间统一示意图
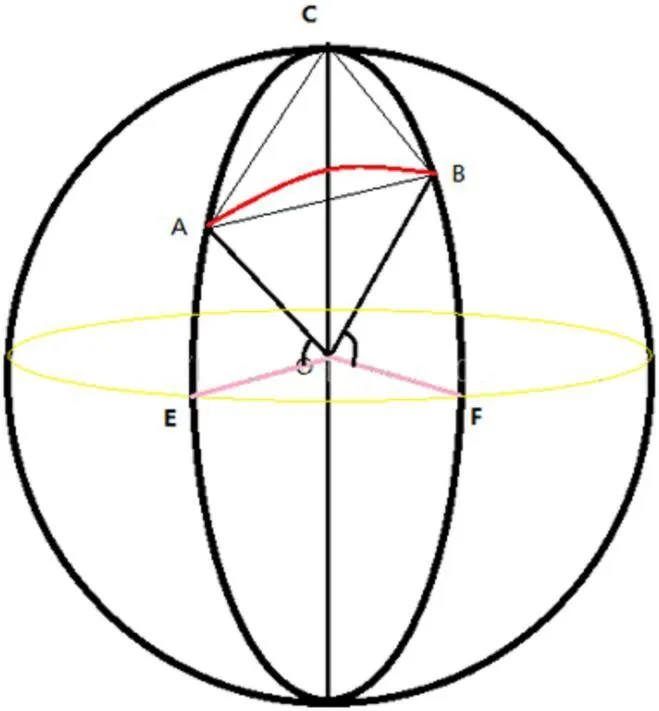
图2:两点经纬度与方位角坐标转换示意图
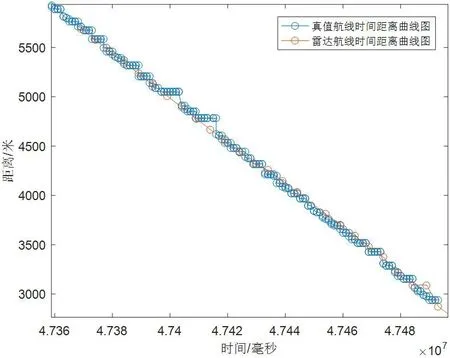
图3:距离精度对比图
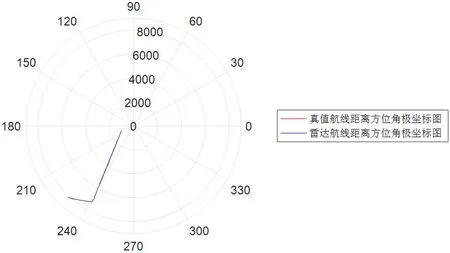
图4:方位精度对比图
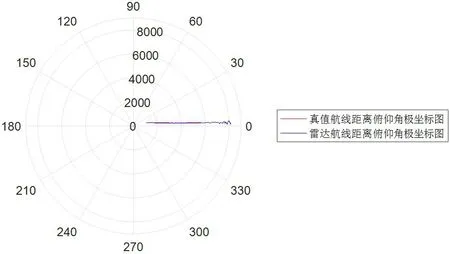
图5:俯仰精度对比图

由半倍角公式sin^2(∠AOB/2)=(1-cos(∠AOB))有;

由sin(∠AOB)=sqrt(1-cos^2(∠AOB))及球面正弦公式可得:


表1:精度统计表
由此可得:

∠C-OA-B 即为固定地物相对于雷达站位的方位角,设为Azi1,由于雷达零位与正北指向之间存在偏差角度,因此需要通过采集雷达对固定地物的回波数据计算出固定地物在大地坐标系中的方位角。假定根据雷达回波数据计算出的固定地物在大地坐标系中的方位角为Azi2,雷达站点自身的指北角为Course,则:

在得到雷达站位准确的指北角后,我们通过坐标变换将目标位置信息中的距离、方位角、俯仰角转化为经度纬度高度信息并输出给指控系统。
4 雷达精度分析
组网雷达在完成时空统一-站位标定后,即可开展目标探测任务。在采集到雷达站点存储的目标位置数据和自带卫星定位系统的目标位置真值数据后,对比两种数据并统计雷达探测精度。画出两种数据(雷达探测数据和目标真值数据)的对比图如图3、图4、图5 所示。
经统计其精度如表1 所示。
5 结论
本文所讨论的基于雷达组网的时空统一-站位标定方法已在某雷达演示验证项目中得到应用,完全满足指控系统对雷达探测精度的要求。这一方法在指控系统时间基准信息内容受限的情况下,采用现有设备,完成了雷达组网、时空统一以及雷达站位标定的要求,提高了试验效率。
猜你喜欢
科学技术创新(2021年11期)2021-05-25
空间科学学报(2020年4期)2020-04-22
电子制作(2019年7期)2019-04-25
宇航计测技术(2018年3期)2018-09-08
河南科技(2015年18期)2015-11-25
海军航空大学学报(2015年4期)2015-02-27
IT经理世界(2014年10期)2014-05-29
中国信息化·学术版(2013年5期)2013-10-09
城市勘测(2013年5期)2013-03-06
小哥白尼·趣味科学画报(2006年1期)2006-02-15