水下可见光通信关键技术研究
2021-06-16 16:42赵晓燕
电子技术与软件工程 2021年4期
赵晓燕
(南京先进激光技术研究院 江苏省南京市 210000)
在信息化、大数据时代的今天,传统的水下有线通信、水下电波通信、水下声波通信因成本高、速率低、体积大、多普勒效应显著[1]、维护困难等一系列问题,已经不满足发展需求。相反的,水下可见光通信技术崭露头角,发展势头良好。水下可见光通信是一种应用于水下的新型无线通信技术,该技术是采用高速脉冲调制解调方法,以可见光为载体,通过水下传输信息的通信方法[1,2]。该技术与水声通信、电波通信等传统的水下通信技术相比,具有通信速率高、信息容量大、传输距离远、带宽高、保密性好、体积小、功耗低、便于维护的一系列优点[3]。
然而,由于水下环境较大气环境具有明显的特殊性,水下可见光通信面临着许多有待突破的技术难点[4,5]。
(1)由于光在水中的衰减较大,且不同水质衰减程度不一样,因此可见光通信面临着水下通信距离受限和不同水质下的环境适应性问题。
(2)光波在水下传输易发生光束扩散和多普勒效应,严重降低了光在水下通信的性能。
(3)水下信道复杂,光链路易受波浪、湍流、水中悬浮物、气泡、浮游生物遮挡等突发因素的影响,进而使得通信的可靠性和稳定性受到影响。
(4)水下或者海下的通信设备由于难以接触,维护时需要进行设备上浮,因此面临维护难和维护成本高的问题。
基于上述原因,能够克服复杂的水下信道环境,完成稳定、可靠、高速的水下可见光通信的关键技术亟待突破。
1 水下可见光通信技术的基本原理
水下可见光通信技术的基本原理[1]如图1 所示,分为发射端、水下信道、接收端和水密空腔壳体四大部分。
发射端主要涉及编码技术、调制技术、光源驱动电路设计和发射光学系统设计。发射端需选用抗信道干扰能力强的编码方式和适合信道特性的高效的调制算法,对发送终端发送的信息进行电调制,然后经过高速驱动电路来驱动光源发光,完成电信号到光信号的转化,再通过发射光学系统完成光束准直,提高光束特性。
水下信道主要涉及水下信道建模技术。携带调制信息的光信号经过水下信道传输的过程中,需考虑水环境对光信号的吸收、散射,以及气泡、湍流等突发因素对光信号的干扰。健全、科学的水下信道建模可以充分预估各种突发因素的影响,进而指导系统设计,提高系统通信的可靠性。
接收端是发射端的逆过程,主要涉及接收光学系统设计、小信号放大技术、解调技术和解码技术。首先接收光学系统中的光电探测器接收光信号,并将光信号转化为电信号,其次对电信号进行放大、干扰滤除等一系列预处理操作,最后对数据进行有效的解调和解码,解调和解码分别是调制和编码的逆过程。
水密空腔壳体用于放置发射端的光、电元器件和接收端的光、电元器件。由于水下尤其深海的特殊性,水密空腔壳体需要充分考虑机械结构领域的水密、耐压、耐腐蚀、散射、重量、材料等问题。
综上所述,水下可见光通信技术涉及到光、机、电各个领域,各部分独立模块的关键技术突破和各部分模块间的相互配合是实现可见光通信稳定可靠的重要基础。
2 高通信速率关键技术
由于光在水中的传输速率可以达到Gbps 的量级,因此通信速率高是可见光通信技术较声波等传统水下通信技术具备的最明显的优点。实际上,由于关键技术的不成熟、硬件设备的制约,水下无线光通信的通信速率一直难以与理论期望值相匹配。硬件响应速率、接口吞吐率以及调制、解调技术往往是水下通信系统通信速率的主要制约因素。
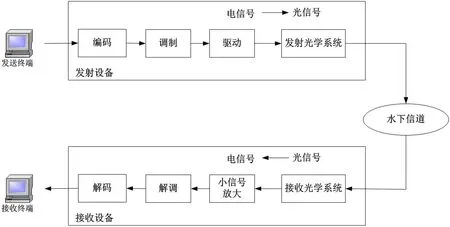
图1:水下可见光通信原理

图2:软件仿真流程图
硬件响应速率主要是指通信系统中光学、电学设备对传输信息的响应速率。为了突破硬件响应速率的制约因素,发射端可采用高速光源驱动电路和并联电流驱动架构,调制带宽高达200MHz;接收端可采用高灵敏度光电探测器PMT,较其他光电探测器具有响应速度快的明显优势。
接口吞吐率主要是指发送/接收终端与编码/解码之间的接口速率。为了突破接口吞吐率的制约因素,可采用千/百兆网口,吞吐率可达1Gbps/100Mbps,接近线速;对于接口速率要求更高的应用场景,还可以采用USB、PCIE 等高速接口。
调制解调技术是水下可见光通信技术的“软实力”,是影响通信速率的关键因素之一。为了突破调制解调技术对通信速率的限制,一方面,可以采用基于FPGA 的高速信号处理电路和多路并行处理软件架构技术来实现,如此,既能充分发挥FPGA 的优势,又能提高调制、解调、编码、解码等数字信号处理环节的实时性和处理速度;另一方面,可以选用高效的调制解调算法,常用的水下调制解调算法有开关键控法(OOK)、脉位调制法(PPM)、正交频分复用法(OFDM)。OFDM 的调制速率可以达到Gbps 量级,OOK 和PPM 的调制速率可以达到kbps 到Mbps 的量级,调制速率越高,对应的通信距离越短。由于OOK 和PPM 各有优缺点,因此还可以采用改进的OOK 和PPM 融合的调制解调算法,既能发挥PPM 功率利用率高的优点,又能解决OOK 抗干扰性差的问题。
3 远通信距离关键技术
水环境对光信号的吸收、散射是影响水下可见光通信技术通信距离的重要客观因素,尽管我们无法改变水环境,但仍然可以在系统设计阶段通过增大光功率、减小水下信道衰减、提高光功率转化效率的关键技术来提高通信距离。
增大光功率的技术包括发射端采用高功率、多光源技术保障发射端的大功率;还包括接收端采用可探测微弱信号的高灵敏度探测器和小信号放大技术,降低对接收端最小功率极限的要求。
减小信道衰减的方法可以通过选择水下衰减最小或最适宜当前水质的光源波段。由于蓝、绿光波段在海水中衰减最小,因此蓝、绿光是国内外目前水下可见光通信技术中最常采用的。
提高光功率转化效率,可以在发射端采用光功率高、调制带宽高的LD 作为发射光源,接收端采用小信号放大技术和抗干扰性强的解调算法,降低系统对接收端信噪比的要求。
4 高可靠性关键技术
可靠性是衡量通信系统的重要指标,如果通信系统的可靠性差,将会造成通信信息的误码、丢失,甚至造成通信的失败。湖、海、河等水下环境较大气环境具有特殊的多样性、复杂性、突发性,使得水下可见光通信的可靠性一直都是水下通信系统面临的严重挑战。要提高水下可见光通信的可靠性,一方面要求通信系统具有不同水质下的环境适应性,另一方面要求通信系统具有面对海洋生物、湍流、气泡等突发环境的抗干扰能力。由于水下可见光通信系统涉及光、机、电各个领域,因此,系统可靠性也涉及到各领域设计的可靠性。
光学系统的可靠性主要考虑光学元器件选型、光路准直、光源稳定性、镜片选择等因素。机械系统的可靠性主要可以通过采用力学性能稳定性分析(如耐高压)、热量分布分析等仿真技术指导结构设计和散热设计。电学系统的可靠性主要考虑软件设计和电路设计两方面的可靠性因素。电路设计的可靠性主要考虑电磁兼容、电磁屏蔽,温漂特性、噪声特性等。这里着重介绍保障软件可靠性的关键技术。
软件可靠性需要做到理论与实践的相结合,理论主要指设计前的理论仿真和建模,实践主要指水下通信的调试与测试,充分摸底信道特性和系统特性。
设计前的系统仿真技术需多维度分析各个影响因素,进而指导设计阶段按最科学的方法保障可靠性。系统仿真流程如图2 所示:首先进行健全的系统仿真模型建立,仿真模型包括构建发射端信息源、发射端、水下信道模型、接收端、接收信息整个链路。其中水下信道模型建立尤其重要,需考虑不同水质(清澈、浑浊等),不同应用水域下(深海、浅海、港口等)的水对光的影响;其次根据设计阶段需求的通信距离、通信速率、通信角度、误码率等参数推算通信系统的设计参数,推算的设计参数主要包括光源发散角、接收视场角、接收孔径等,上述参数可以进一步指导元器件的选型;与此同时,通过水下信道的建模,设计师还可以明晰不同水域下的信道信噪比特性,用以标定接收端解调阶段的噪声基底,这对系统具备自适应不同水质环境能力具有重要作用,是提高系统可靠性的关键。
设计后的水下通信系统的调试与测试环节可以实际摸底系统特性和水下信道情况,是设计前系统仿真环节的反验证。该环节需要摸清当前水质下的噪底特性、通信设备固有特性以及通信系统所能达到的最长通信距离、最短通信距离、最大通信开角、自干扰现象,通过实测数据进一步修正设计前的系统仿真。
5 结束语
本文系统的分析了水下通信技术的基本原理、主要系统构成、重要技术指标以及保障各项重要技术指标的关键技术。通过采用上述关键技术,可实现通信速率范围1Mbps~100Mbps、通信距离范围5m~150m 的高速水下可见光通信系统,试验证明,该系统能抵御气泡、湍流等各类复杂干扰,能够在高光、浑浊等恶劣环境下有效通信,稳定性强、可靠性高。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
今日农业(2021年8期)2021-11-28
今日农业(2021年13期)2021-11-26
现代畜牧科技(2021年3期)2021-07-21
石家庄铁路职业技术学院学报(2021年1期)2021-06-09
新能源科技(2021年6期)2021-04-02
科学技术创新(2021年7期)2021-03-23
落叶果树(2021年6期)2021-02-12
数学小灵通·3-4年级(2017年3期)2017-04-16
上海农业学报(2017年3期)2017-04-10