轮胎式集装箱龙门起重机绿色能源智能存储
2021-06-15 02:54:36王成
起重运输机械 2021年10期
王 成
上海振华重工(集团)股份有限公司 上海 200125
0 引言
轮胎式集装箱龙门起重机(简称RTG)作为集装箱堆场上广泛应用的专业化作业设备,依靠大功率柴油发动机作为动力源运行的弊端已多数通过油改电的改造得到解决,但改造后的起重机在转场作业时仍存在诸多的能源供应问题[1]。油改电后的RTG需要新增设能量反馈装置才可以将重载下降时的能量回收[2],因成本原因没有大面积实施,而以小功率柴油发电机和动力电池组成的可插电串联增程式动力源可彻底解决这些关键问题。选定动力电池组的功率、能量参数后,动力电池组的充放电控制策略是增程式动力源寿命长、运行稳定的关键。
1 串联增程式动力源的结构和工作原理
1)动力电池(能量存储单元)作为整机电能的供给源,通过小功率的柴油发动机采用时间累积能量的方法进行储能。为起升机构等提供短时大功率能量,为辅助设备提供长时间小功率的能量。平时小功率柴油发电机组以可控的小电流对储能单元进行充电储能。当起升机构电动做功时,能量从储能单元集中输出,满足起升机构加速运行时的峰值功率和匀速运行时的稳定功率需求。起重机运行所需要的全部能量均由可大功率充放电的能量型电池组提供,电池组充电电源可来自市电电网、小功率柴油机、起重机重载势能下降时转换回收的电能三个部分。由于动力电池的性能不断改善,可满足大功率充放电,可将势能下降制动转换的电能全部回收,并在起重机起升做功时快速释放电能;同时摒弃了大功率柴油机工作外特性导致的直接能源浪费,以实现起重机节能的目的。
基于以上增程式动力源的结构以及节能原理的描述,电池组作为该形式动力源的核心,其容量和功率的选择是系统安全、平稳、可靠运行的关键,小功率柴油机运行时只依据电池组的充放电状态而无需考虑起重机作业时总的能量、功率需求,可工作在最佳能效工作区域对能量存储单元进行充电,大幅度降低了起重机的能源消耗量,因此可直接大幅度降低大量氮化物(NOx)、硫化物(SOx)、碳化物(COx)等混合废气污染;未来LNG、氢燃料电池还可继续替换掉小功率柴油机,进一步提高节能降耗的效果。由于电池组具备大功率充放电的特性,可将重载势能快速下降时产生的短时大功率电能直接快速吸收,则可取消传统RTG上连接在变频器直流母线上的制动单元和制动电阻,进而优化能量系统的结构,降低能源系统购置成本的同时提高系统的可靠性。在起升机构下降的过程中,所有产生的电能都将回馈动力电池组,再生能源的利用将深度影响节能降耗的效果。由于动力电池组是多输入、多输出的工作原理,因此对其能量的存储策略将对电池组的寿命和系统工作性能产生重要影响[3]。
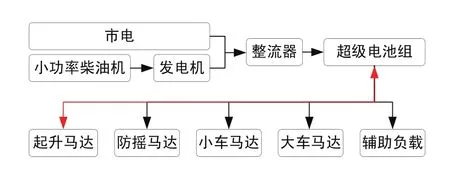
图1 串联增程式动力源起重机动力结构图
2 动力电池组智能控制的解决方案
可插电串联增程式动力源的结构由能量产生单元、能量存储单元、能量消耗单元组成。要发挥出动力源的极致性能,需要建立从稳态工况下的燃油经济性单一目标优化到考虑各种瞬态工况和非线性、时变作业工艺下,对各个部件性能影响的燃油经济性、排放和各能量单元之间协调控制平稳性、鲁棒性都有较高要求的电池组充放电控制的策略。
可插电串联增程式动力源的核心是动力电池,动力电池的充电来源如前文所述的三种途径,动力电池充放电的控制策略不同会使小功率柴油发电机的投入工作机制产生不同,对势能的回收也会产生差异,同时需要考虑频繁深度充放电对电池性能产生的不利影响。通常的控制策略有恒温器式和功率跟随式,恒温器式是指小功率柴油发电机的投入机制只与动力电池组的荷电状态(SOC值)直接联系,当SOC值低于动力电池组设定的最高值时,发电机以最佳工作点投入运行,对电池组进行充电,直至SOC值达到最高设定值时即停止工作。功率跟随式在恒温器式基础上又考虑了起重机作业功率的大小,当所需功率较大且SOC值也已经到达最高值时,小功率柴油发电机依然会投入运行对电池组进行充电,以弥补作业所需的大功率对电池组SOC值快速下降导致的电池深度充放电的影响。RTG在长时间进行装船作业时,以带载下降作业工况居多,通常采用恒温器式的控制策略,留出更多的电池能量存储空间,以吸收反馈的势能;而当起重机长时间进行卸船作业时,以带载起升作业工况居多,通常采用功率跟随式的控制策略,以减少电池深度放电造成的寿命影响。
RTG动力电池充电来源于中小功率柴油发电机供电和市电取点,都属于消耗型供电,而吸收势能则属于回收型供电,因此在考虑动力电池组充放电控制策略时,可将消耗型供电进行统一考虑。
3 基于模糊控制的动力电池组智能能量管理策略
模糊控制的智能控制策略依据简单经验编制难以精确定量表达的规则,不需要建立复杂的模型,以便接近实际状态和考虑各种不同影响因素(电池组的荷电状态、作业功率的需求以及发电机的工作状态等),因此常被用来进行实际的工业控制,体现出较强的控制鲁棒性,适合于RTG非线性、时变性强的工作机制。
本文在考虑绿色可插电串联增程式新动力源RTG能源系统的智能模糊控制策略模型时,以RTG运行所需功率Qr、超级动力电池组的当前荷电状态μsoc为模糊控制模型的输入变量;将消耗型供电功率即小功率柴油发电机对电池组的充电功率Pin定义为模糊控制模型的输出变量。
根据典型的RTG各机构电机额定功率及辅助用电设备的额定功率运行组合,将Qr论域表达为Z={-110,-80,-30,50,120,160,190,220,250},论域中的数字表示起重机运行所需功率,负数值表示势能下降时可回收再生能量的功率,正数值表示起重机运行所需功率;根据动力电池不同的充放电外特性及深充深放对电池组寿命的影响,将μsoc论域表达为Z={2,3,4,5,6,7,8,9,10},其中各数字分别表示动力电池组荷电状态(SOC值)为[0.2,1]之间的状态;根据消耗型供电来源的输出功率,将Pin的论域表达为Z=[0,1,2,3,4,5,6,7,8],数字0代表不对电池组充电,数字1~8为以10 kW为间隔的充电功率。
经过模糊控制反模糊化运算后,可将控制策略进行列表以供RTG控制程序进行查询,作为小功率发动机调速系统的控制输入,如表1所示。同时模糊控制规则也方便工程技术人员根据起重机不同的作业工况、码头实际作业习惯、工艺要求进行人为干预。
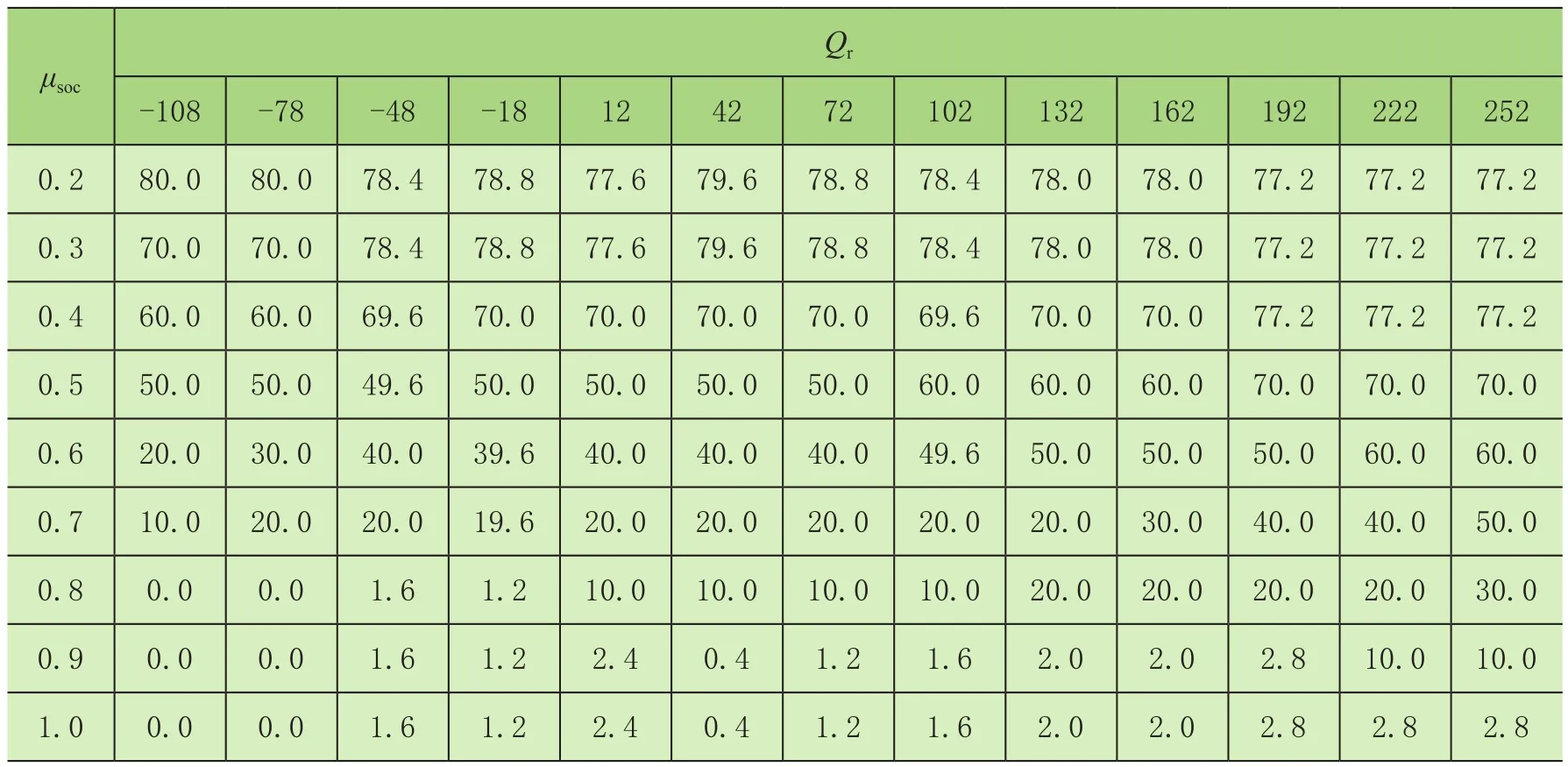
表1 小功率柴油发电机智能充电功率控制查询表 kW
4 结语
由表1可知,当动力电池组的荷电状态小于0.5时,无论起重机运行所需多少功率,消耗型能量输入都将以恒温器方式用较大的功率对电池组进行充电,迅速提高电池组的荷电状态,减少深度放电对电池组循环寿命的影响,控制策略的鲁棒性较好。当动力电池组的荷电状态在0.6~0.8时,消耗型能量输入将以功率跟随方式动态调整充电功率,即可为回收型能量的输入留出足够的空间,又能避免电池组进入深放区间,综合考虑到该类型能量源起重机的节能效果和电池组的循环寿命,控制策略的灵敏度较好。
猜你喜欢
能源工程(2022年2期)2022-05-23 13:51:56
房地产导刊(2021年11期)2021-11-27 08:52:34
测控技术(2018年11期)2018-12-07 05:49:38
消费导刊(2017年19期)2017-12-13 08:30:52
电源技术(2017年1期)2017-03-20 13:37:58
现代商贸工业(2016年9期)2017-01-07 11:42:11
电源技术(2015年11期)2015-08-22 08:50:42
电源技术(2015年9期)2015-06-05 09:36:06
建筑机械化(2015年7期)2015-01-03 08:09:04
电测与仪表(2014年24期)2014-04-09 11:35:56