基于以太网的太赫兹成像系统电路设计
2021-06-14 13:02林定君鲁斌
电子设计工程 2021年10期
林定君,鲁斌
(中国电子科技集团公司第五十研究所,上海 200331)
太赫兹波是指电磁频率在0.1~10 THz(波长在3 mm~30 μm)之间的电磁波,波段介于微波与远红外光之间。20 世纪80 年代中期以前,由于缺乏有效的产生方法和检测手段,科学家对该波段电磁辐射性质的了解非常有限。近年来超快激光技术的发展为太赫兹波脉冲的产生提供了稳定、可靠的激发光源,使太赫兹辐射的研究蓬勃发展。由于太赫兹波的独特性质,它在物理、生物、化学、生物制药、材料科学和电子工程等许多领域得到了应用[1]。
太赫兹人体安检技术是利用太赫兹波对日常衣物材料(如棉、麻、化纤等)特殊的穿透性,并结合各种成像技术,就可以对人体隐匿物品进行检测[2]。和目前的隐匿物探测技术相比,光学/红外探测技术无法穿透衣物和包裹层探测隐匿违禁物;X 射线和CT探测系统具有很好的穿透性,但其高辐射会伤害人体;金属安检门无法对非金属违禁物检测,而且也无法定位;手持式金属探测器无法检测非金属违禁物,而且检测方式为接触式,容易造成被检人员的被侵犯感。被动式太赫兹技术,不能检测人体生理特征细节,不侵犯被检测人员的隐私,同时也能分辨非金属违禁物和显示违禁物的藏匿位置[3]。
由于大面阵太赫兹探测器实现难度很大,导致系统像元数有限,如果直接扩大光学视场则势必降低系统的空间分辨率,系统很难同时满足大视场和高分辨率的要求,必须通过扫描的方式以扩大视场[4-6]。针对这种情况,设计了一套基于Ethernet 通信,通过控制扫描机构实现二维扫描,并可实现同步采集多通道探测器输出信号的电路系统。
1 系统方案
被动太赫兹成像系统接收的辐射功率来自于两部分:一是被测目标自身的辐射,二是被测目标对周围环境辐射的反射。对人体携带隐匿物进行探测时,进入成像系统的主要能量来自于人体皮肤、衣物、隐匿物及其对环境辐射的反射,衣物材料通常对太赫兹辐射具有很高的透过率,而发射率及反射率均较低,人体皮肤对太赫兹辐射有较强的吸收率,因此发射率较高,反射率很低。因此无隐匿物存在的情况下,太赫兹成像系统接收的能量主要来自于人体皮肤的辐射[7]。当有隐匿物存在时,特别是金属隐匿物存在时,对环境的反射率发生改变,从而使得进入太赫兹成像系统的能量发生改变。利用有无隐匿物存在时进入系统的能量差异,即可对隐匿物进行探测,利用探测器接收太赫兹能量,利用电路系统将其量化从而实现对人体的成像探测。系统的原理框图如图1 所示,电路系统是连接系统主要部件(探测器、扫描系统等)与应用软件的桥梁,其主要作用是通过二维扫描扩大视场,确保系统可对人体进行逐点扫描,对检测信号进行采集,并传输至PC 机(应用软件)进行后续的处理、显示及保存等。
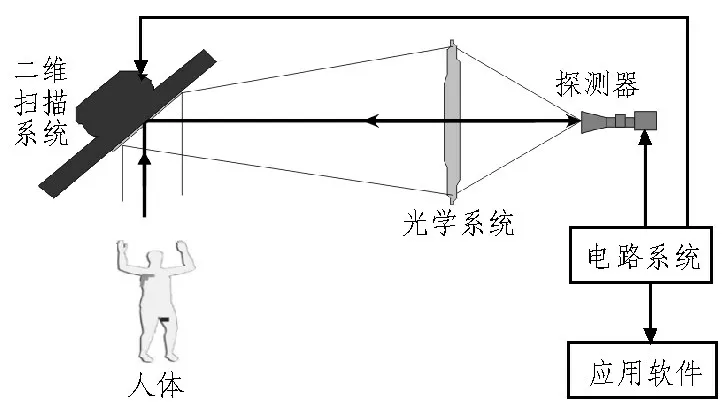
图1 被动太赫兹成像系统原理框图
根据成像系统对电路系统的要求,电路系统的主要任务包括:1)探测器的信号采集与处理;2)二维扫描控制;3)与PC 机(应用软件)的指令以及数据传输;4)为系统其他部件提供电源。
经过分析论证,选用FPGA作为控制器,扫描机构控制方案采用FPGA 加电机驱动器的方式,即根据扫描行程要求,由FPGA产生相应的时序控制信号,经过电机驱动器转化为相应的驱动电流,驱动平移台完成二维扫描。电子学系统与PC 机间的数据通信拟采用Ethernet接口[8-10],电子学系统的原理框图如图2所示。
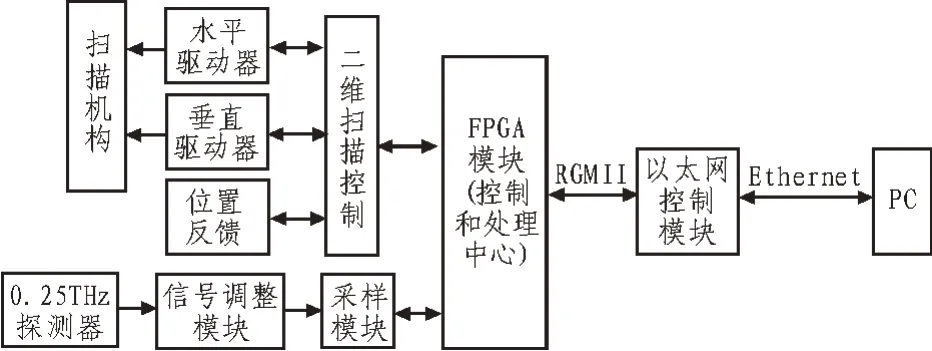
图2 电路系统原理框图
2 系统硬件实现
项目系统总体方案设计中采用的探测器频率为0.25 THz,该频段探测器工作方式为外差式,受限于工艺水平,无法做到大规模像元集成,目前只能做到4像元的线列,为了实现系统3 m 处的视场能够达到0.6 m×1.8 m的指标,需要通过二维扫描方式来扩展视场范围。系统中二维扫描控制采用两个维度一快一慢同时进行扫描[2],扫描行程如图3所示。该系统通过无刷电机驱动扫描镜在连续扫描方向来回摆动,通过步进电机驱动扫描镜在步进扫描方向来回摆动,实现二维扫描。垂直方向进行快速扫描,水平方向进行慢速扫描,数据采集完成后再根据扫描行程进行图像校正。
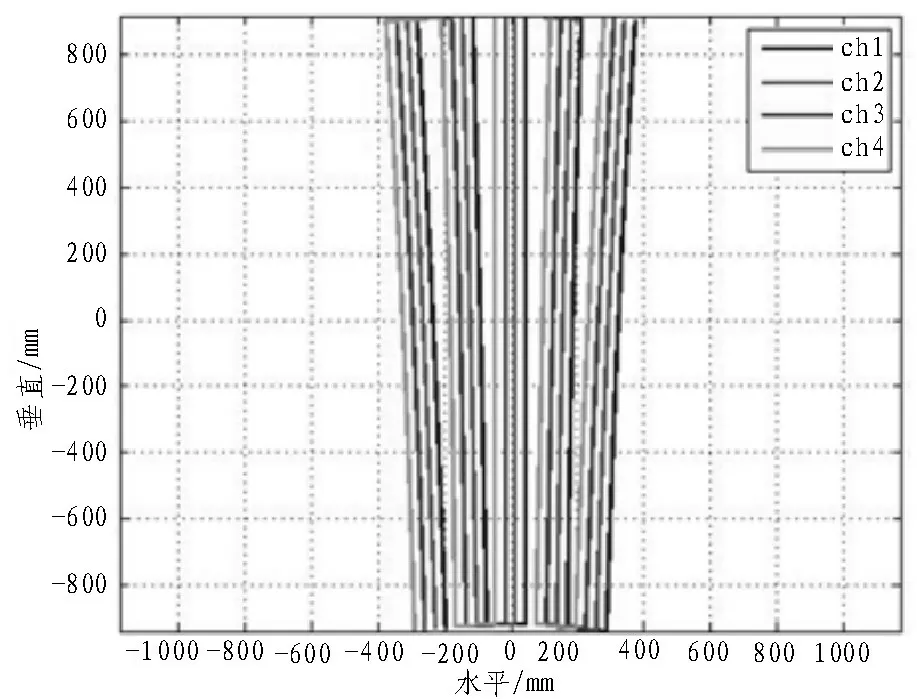
图3 二维扫描行程
为保证3 m 处的视场能够达到0.6 m×1.8 m,扫描镜摆动的角度至少应为7.5°×17°。扫描机构在垂直方向采用曲柄连杆机构,将电机的单向连续转动转化为扫描镜的双向摆动,提高垂直方向大视场下的扫描速度,避免电机频繁启停带来的失步等问题;在水平步进方向采用闭环控制的步进电机或伺服电机,以实现高速平稳的启停。
由于系统针对的是人体的隐匿物检测,一般测量范围为200~400 K,温度灵敏度优于0.2 K,所以系统的动态范围应大于1 000,那么A/D 转换器至少应为10 位。但考虑到如测量热水、高温黑体等物体的特殊情况,系统应能正常工作,A/D 转化器应有一定的余量,因此选用14 bit的A/D 转换器。由于系统共用4元探测器,为便于后续扩展,选用8 通道A/D 转换芯片。根据系统的二维扫描方案,连续扫描的平均速度为4.8 m/s,为保证空间的分辨率,实行过采样,采样的间隔应小于5 mm,因此,每通道系统采样率至少为960 sps。综合考虑,系统选用AD 公司的AD7607 A/D转换芯片。AD7607是一款8通道14位A/D 转换器,采样率可达200 ksps,采用过采样技术及数字滤波技术,可有效减小噪声,内置输入钳位保护电路、输入缓冲器、抗混乱叠滤波器以及高精度参考电平。
系统的数据采集速率大约为3 Mbps,同时,为了更清晰地显示隐匿物的位置,系统还需同步传输可见光图像,图像的帧频最大为15 fps、每帧像素点个数为1 600×1 200、每个像素点数据格式为RGB565,因此图像传输速率最大要求为16×1 600×1 200×15 bps=460.8 Mbps。所以主处理器FPGA 与PC 机的通信传输速率需求约为464 Mbps,因此该系统采用UDP/IP协议的以太网数据传输[3]。
在系统中,以太网网卡选用VITESSE 公司的VSC8601 芯片,VSC8601 是一款用于局域网的低功耗吉比特以太网网卡芯片。它能够支持半双工或全双工的10BASE-T、100BASE-TX 及1000BASE-T 的通信速度,遵循IEEE 802.3 标准以太网网络协议,通过标准5 类(cat5)的非屏蔽双绞线(UTP)的传输距离超过140 m。VSC8601 典型的应用框图如图4 所示,VSC8601 内部功能框图如图5 所示。
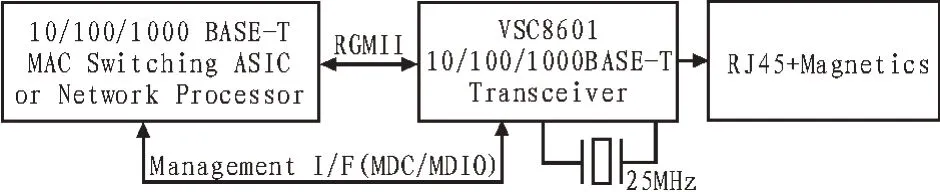
图4 VSC8601典型的应用框图
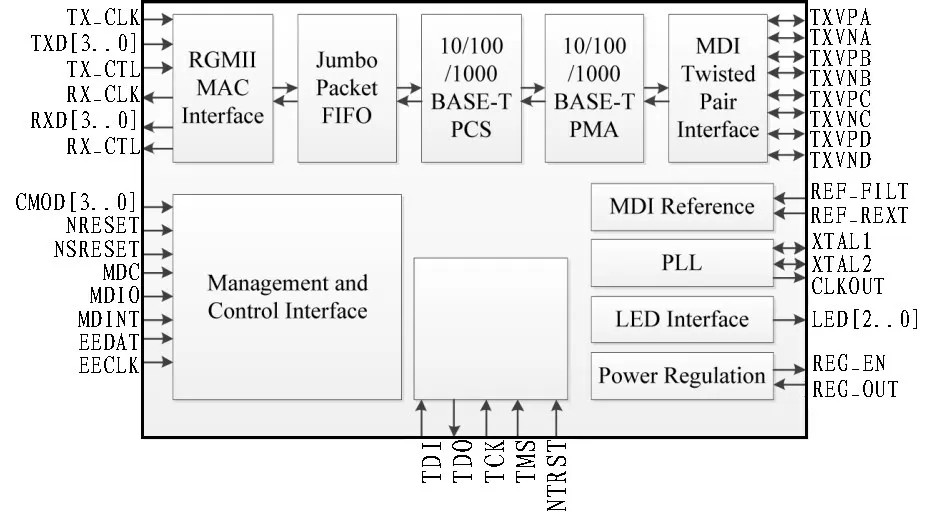
图5 VSC8601内部功能框图
VSC8601 仅支持精简吉比特介质独立接口(RGMII),用于MAC 和PHY 之间的通信,并不支持吉比特介质独立接口(GMII)。RGMII 采用4 位数据接口,工作时钟为125 MHz,并且可以在时钟上升沿和下降沿同时传输数据,因此,其传输速率可以达到1 000 Mbps。同时RGMII 可以兼容MII 所规定的10/100 Mbps工作方式,支持传输速率为10/100/1 000 Mbps,对应的时钟分别为2.5/25/125 MHz。RGMII 数据结构符合IEEE 以太网标准。
典型应用电路如图6 所示。
电源系统接收外部提供的24 V 电压,并将其转换为其他功能模块所需的各种电压,包括探测器正常工作所需的+12 V,驱动器工作所需的+24 V,模拟电路工作所需的+5 V、+12 V、-12 V,数字电路工作所需的+5 V、+3.3 V、+2.5 V、+1.2 V。电源部分原理框图如图7 所示。
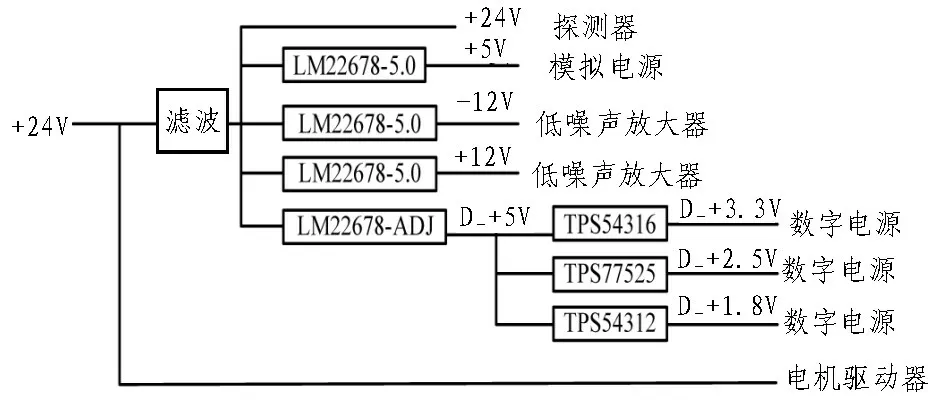
图7 电源原理框图
3 系统软件实现
FPGA 主要完成时钟和复位产生、控制器与上位机通信、探测器信号采集处理、二维扫描机构控制、可见光图像获取等功能,FPGA 代码架构如图8 示。
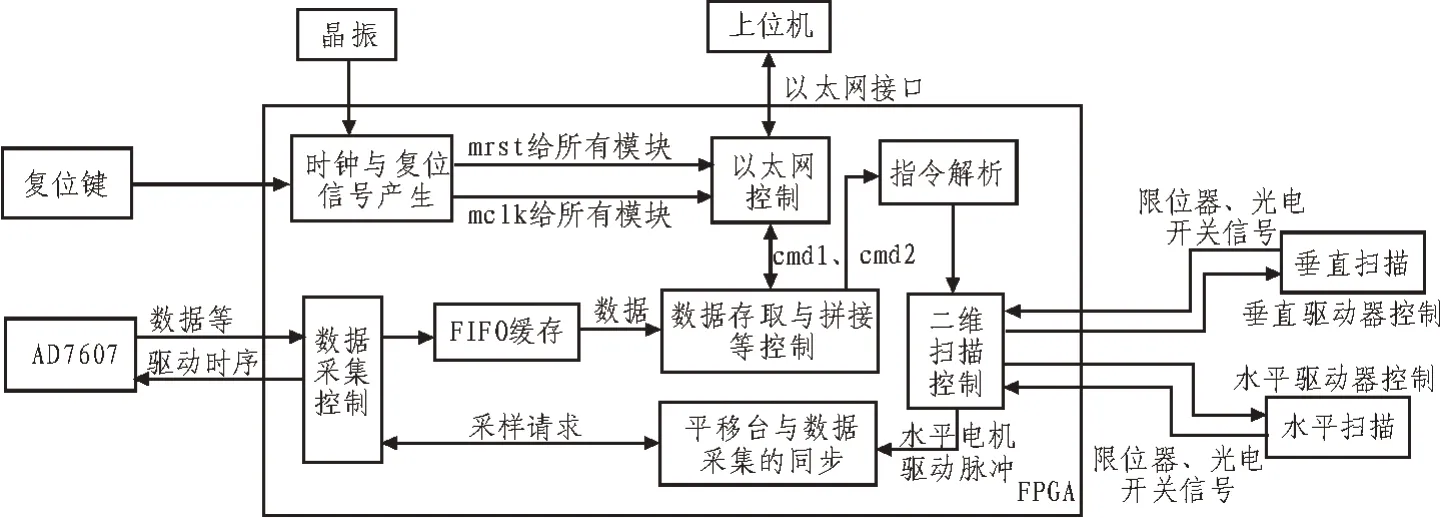
图8 FPGA代码架构
以太网控制模块结构包括发送模块、控制模块、接收模块和RGMII 管理模块。以太网MAC 和PHY的管理接口一般是MDIO,采用MII 接口,该系统中采用MII 子类型RGMII 接口。MII 接口控制PHY 芯片寄存器的读写,用于读取PHY 的状态和设置流控开关、工作模式等,一般默认设置即可。
以太网组包结构如图9 所示,系统采用UDP/IP协议进行以太网数据传输。接口转换模块传输的数据为用户数据,纯粹的用户数据是无法直接传输到上位机的,以太网发送模块在用户数据基础上添加用户头、UDP 头、IP 头和以太网头,然后按照电路要求转换为相应的数据和控制信号。
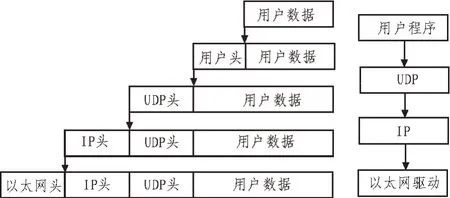
图9 以太网组包结构
以太网接收模块与以太网发送模块相反,将接收到的数据信号转换为以字节为单位的数据,然后去除以太网头、IP 头、UDP 头和用户头,最后将数据传输到接口转换模块。
4 实验结果
为了验证太赫兹成像系统的隐匿物识别性能,采用4 种具有代表性的隐匿物,分别为陶瓷刀、瓶装水、玩具枪和药剂颗粒,如图10 所示。

图10 样品示意图
对采集到的太赫兹成像数据展开重构,得到太赫兹图像,然后,对图像采用多种处理算法和目标识别算法,处理后的成像[11-17]结果如图11 所示,从图中可以清晰地分辨携带的隐匿物。为了验证系统的分辨率性能,对分辨率板进行成像测试,分辨率板从上到下间距大小分别为1.5 cm、2 cm、3 cm 的窗口缝隙,成像结果为对3 m 位置处人手持分辨率样板所得的图像并进行相应的图像处理,样品以及成像结果如图12 所示。结果可以清晰分辨出2 cm 的明暗相间的条纹,说明设计满足系统要求。
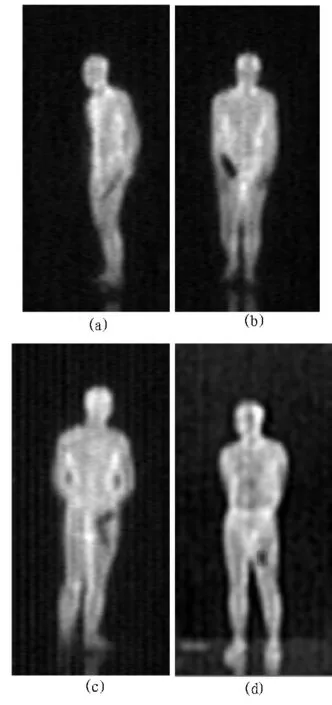
图11 样品成像结果
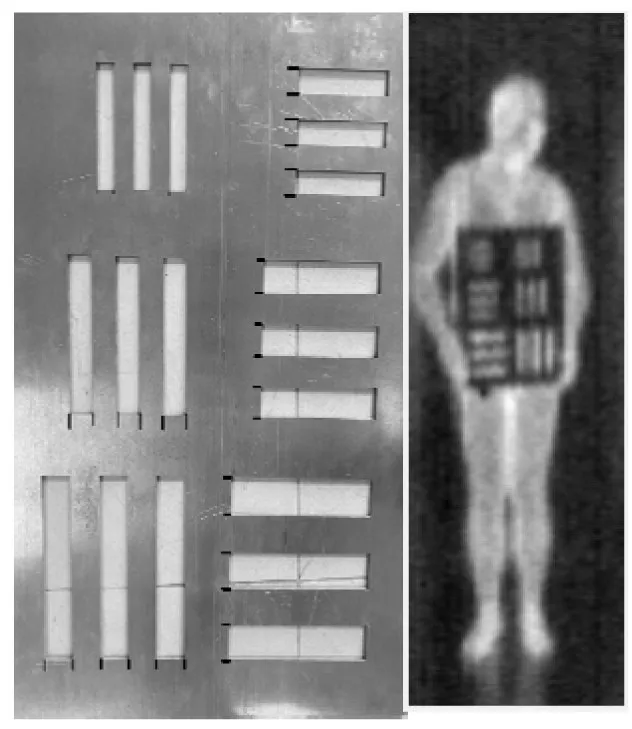
图12 分辨率板及成像结果
5 结论
设计了一套基于以太网通信的应用于被动太赫兹成像的电路系统,采用四像元250 GHz 的阵列探测器,利用该系统实现了对人体隐匿物的检测,3 m 位置处成像分辨率达到2 cm,电路系统很好地满足了成像系统的应用需求。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
科学技术创新(2021年25期)2021-09-11
汽车维修技师(2019年7期)2020-01-16
中国医疗设备(2019年1期)2019-01-15
汽车维修技师(2018年11期)2018-05-11
雷达学报(2018年1期)2018-04-04
雷达学报(2018年1期)2018-04-04
雷达学报(2018年1期)2018-04-04
中学生数理化·高一版(2017年1期)2017-04-25
传感技术学报(2016年6期)2016-09-09