
基于手术导航的术中快速重建开颅缺损结构的研究
2021-06-11 08:17王志刚谢杨洁杨荣骞
中国医疗器械杂志 2021年3期
【作 者】王志刚,谢杨洁,杨荣骞
1 广州艾目易科技有限公司,广州市,511436
2 华南理工大学 材料科学与工程学院,广州市,510641
0 引言
随着科学技术的不断发展,手术导航系统已成为外科手术尤其是神经外科手术中常用的辅助医疗设备。手术导航系统的主要功能是通过实时显示患者的解剖结构与手术工具的相对位置,来解决传统手术中手术工具在人体内部的视野严重受限的问题。在手术导航中,空间注册是一个关键步骤。通过空间注册可以实现三维图像空间和实际手术空间的病人解剖结构的匹配,从而可以在导航界面的三维医学图像上显示对应到实际空间病人的解剖结构。标定手术工具以后,导航仪可以识别手术工具并实时追踪手术工具在手术空间的位置,并且可以将手术工具与患者的相对位置在二维和三维图像界面中显示。基于此功能,手术导航可帮助外科医生准确定位病变区域,提高手术精度,减少术中创伤[1-6]。
由于大脑功能组织结构复杂,大部分手术入路会造成颅骨缺损,在术前计划中,手术入路会根据病变部位进行设计,因此不同的手术中由于手术入路形成的缺损也会有所不同[7-9]。一些复杂的颅骨缺损,术前不能制作出与实际缺损完全一致的补片。ESSAYED等[10]提出一种颅骨修复的方法,通过在术前制作补片然后在术中根据实际缺损的形状和大小进行裁剪得到合适大小和形状的补片,实验结果表明此方法可以帮助医生进行更好的补片重建。制作颅骨补片的材料和方式影响着颅骨修复效果,从而对患者的预后产生了影响。在目前常用的方法中,颅骨修复材料多采用容易裁剪固定的高分子材料,如聚甲基丙烯酸甲酯(PMMA)、聚醚醚酮(PEEK)等,制作方法多采用快速成型的方式[11]。虽然临床技术在不断发展,但术后脑脊液的渗漏和伤口感染仍然时有发生。而颅骨缺损重建是影响术后恢复的重要步骤,因此目前关于颅骨修复的研究仍是一个重要的课题。
目前的临床手术中,大部分的颅骨缺损修补是需要术前制作补片的,因此,术前制作的颅骨补片可能与手术过程中形成的颅骨缺损大小、形状不一致。而对补片的裁剪通常会造成一定程度的误差,并且在操作上给外科医生带来不便。因此提出一种自动提取颅骨缺损结构的方法,通过手术导航设备采集到的缺损边缘信息,设计算法从术前扫描的包含完整颅骨的图像中提取出缺损的结构。并做头模实验对方法的精度进行评估。
1 材料和方法
此方法在术中利用导航系统获取到实际缺损边缘点的坐标以后,通过自动提取缺损结构的算法将缺损颅骨的三维结构从颅骨中分割出来并进行重建。
1.1 手术导航系统与材料
随着科学技术的发展,手术导航系统成为外科手术中常用的辅助设备。手术导航系统的主要功能是可视化病人的三维结构,辅助医生进行手术操作,介绍手术过程中造成的创伤。在导航系统辅助的手术中,需要在术前对病人进行扫描,获得医学图像序列。手术开始以后,通过空间注册步骤,可以将病人的手术空间的解剖结构与图像空间三维重建的结构进行匹配。从而在导航界面上可以显示与手术空间目标位置相对应的位置,解决目标位置视野受限的问题。在对手术工具进行标定以后,导航系统可以识别手术工具并对其进行实时跟踪,确定手术工具与病人解剖结构的相对位置,并在导航界面上显示出来,从而辅助医生减少手术过程中给病人带来的损伤(图1)。
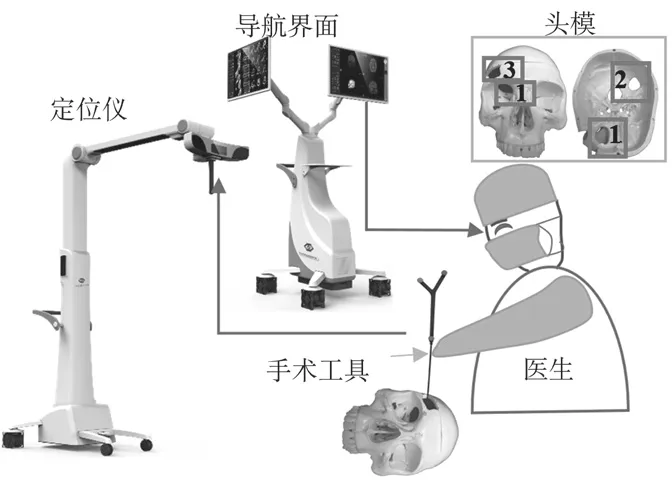
图1 实验场景示意图Fig.1 Experimental scene diagram
颅骨修复中常用的修复材料包括钛网(Ti)、自体骨与高分子材料(如聚醚醚酮,即PEEK)等。考虑到材料的生物相容性、稳定性以及可在术中进行裁剪等特点,颅骨修复方法中使用的材料为PEEK材料。PEEK 是一种流行的合成热塑性高分子有机材料,其弹性模量比金属更接近于骨,具有良好的生物相容性、抗辐射性、稳定性和无伪影,由于耐高温灭菌性,可在术中对其操作后再消毒。采用快速成型的方式将PEEK材料加工成颅骨补片,并在术中对补片进行个性化裁剪从而获得与实际缺损结构一致的补片用于颅骨修复。
1.2 方法
1.2.1 方法操作流程
提取颅骨缺损结构的操作流程如图2所示。通过空间注册可以得到手术空间与图像空间之间的变换矩阵。在使用导航系统对手术工具进行标定后,可以使用手术工具确定手术空间病灶区域并按照术前规划的手术路径进行手术入路操作。

图2 提取颅骨缺损结构的操作流程Fig.2 The procedure of extracting skull defect structure
在颅骨缺损形成以后,使用手术工具沿着颅骨缺损边缘进行描画(如图2(a)所示):手术工具尖端沿着实际缺损边缘进行描画,导航系统实时跟踪手术工具的位置,结合空间注册的结果,计算手术工具尖端在图像空间的坐标并记录下来。自动重建算法可以通过采集到的图像空间颅骨缺损边缘坐标和三维的图像数据将缺损结构从图像中分割重建出来。重建完成以后可以进行补片的制作和植入。
1.2.2 自动重建缺损结构的算法
自动重建缺损结构的算法的过程,如图3所示。本算法的输入数据为采用导航系统记录到的缺损边缘的点集坐标P和根据颅骨灰度范围从三维重建图像中分割出的颅骨结构中所有三维点的点集坐标S(如图3(a)所示)。其中根据颅骨部分灰度值,从三维重建的医学图像中分割出颅骨点显示为标记1。手术工具尖端沿缺损边缘跟踪时所记录的图像空间缺损边缘点集显示为标记2。

图3 算法过程图Fig.3 Chart of algorithm process
在获取到输入点集P和点集S后,对点集P和点集S进行旋转和投影操作得到二维点集Pp和Sp,并从点集Pp中提取其最外层轮廓(如图3(b)),并判断点集Sp中哪些点在该轮廓内部,这些点对应的三维点(记为点集K)如图3(c)中标记3所示。我们把判断一个点是否在轮廓线的方法叫做射线法:从这个点向左画一条水平线l,然后计算l与边界的交点个数c。如果c值为奇数,则认为该点在边界上或者边界内;如果它是偶数,那么这个点在边界外。图3(d)显示了提取到的点集K与记录的缺损边缘之间的位置关系。为了从点集K中获取颅骨缺损,我们找到了P的最小包围盒并将其进行二值化,然后计算出最小包围盒中的连通域。在这些连通域中,质心距离记录的缺损边缘点P的质心最近的连通域即目标连通域(见图3(e)中标记4点集)。所求的缺损点集及其在颅骨中的位置,如图3(f)标记5所示。
2 实验
2.1 实验材料选择
本实验中使用的头颅模型是按照真实人体颅骨大小形状进行制作的(如图1中所示头模)。为了模拟真实的手术,根据手术入路的不同在模型上设计了两种不同的缺损,这两个缺损与现实手术中的颅骨缺损相似。图1中的模型上标注“3”号的缺损通常可以在手术中用自体骨修复,不需要重建。我们需要重建的缺损为上眼眶缺损(编号为“1”)和后颅底缺损(编号为“2”)。
2.2 实验结果与分析
为了评价颅骨缺损的建模方法,我们在颅骨缺损出现后对颅骨模型进行了重建。为了比较真实缺损与计算缺损模型的吻合情况,将缺损形成前扫描的颅骨图像与缺损形成后扫描的颅骨图像进行匹配,使颅骨缺损与计算出的缺损模型在同一图像坐标系中。在匹配两个空间后,我们可以计算出导航系统记录的缺损边缘点与真实缺损边缘之间的最近距离的平均值。表1为两种不同缺损位置的距离平均值和标准偏差的五组数据。结果表明,右上眼眶实际缺损边缘与模型缺损边缘的平均距离为0.424 mm,后颅底缺损边缘与模型缺损边缘的平均距离为0.377 mm,精度满足临床要求。

表1 记录的缺损边缘点与求得的缺损结构边缘的距离Tab.1 The distance between the recorded defect edge points and the extracted defect structure edge
图4显示了从完整的颅骨图像中分割重建出来的缺损与缺损形成后的头模匹配过后的相对位置关系。其中标记6为用自动重建缺损结构的算法求取的缺损结构,图中的头模颅骨是缺损形成后扫描的图像通过与完整的头模图像进行匹配过后的位置。

图4 重建提取到的缺损结构和术后扫描的头模图像Fig.4 Reconstruction of the extracted defect structure and postoperatively scanned head model image
3 讨论
手术导航系统通过三维重建医学图像,可以直观地把病灶的位置、大小和周围毗邻重要的神经、血管和组织结构等显示出来,为外科手术提供精确的病人解剖结构的定位。提出的方法根据手术导航系统获取到的准确的缺损边缘信息,通过自动重建算法将颅骨的缺损结构从术前完整结构的三维图像中提取出来。通过头模实验验证方法的可行性和精确度。由于重建的缺损结构是从颅骨中分割出来的,因此不仅轮廓与实际缺损吻合,而且重建出来的结构与实际缺损的结构一致。分别模拟人体上眼眶缺损和后颅底缺损进行五组实验,实验结果显示提取到的缺损结构与实际缺损边缘吻合良好,其精度满足临床精度要求。未来随着科学技术的发展,制作补片的时间缩短到允许在术中进行补片的制作。本方法可有效地应用在临床上,不仅可以术前手动分割出补片结构进行补片制作,减少术中医生进行手动裁剪的繁复操作,还可以避免因为手动裁剪补片带来的误差,确保术中重建的补片结构与实际缺损一致,从而提高颅骨修复效果,降低术后并发症的产生。
猜你喜欢
疯狂英语·新阅版(2021年6期)2021-07-19
中华胃食管反流病电子杂志(2021年2期)2021-03-09
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
中国临床医学影像杂志(2019年4期)2019-06-18
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
中国惯性技术学报(2017年1期)2017-06-09
西南国防医药(2016年7期)2016-12-01
百科探秘·航空航天(2016年9期)2016-12-01
腹腔镜外科杂志(2016年9期)2016-06-01
第二课堂(课外活动版)(2015年3期)2015-10-21
