面向故障预测与健康管理的传感器优化配置*
2021-06-11 00:52:24贾希胜郭驰名马云飞
火力与指挥控制 2021年4期
邢 鹏,贾希胜,郭驰名,马云飞
(陆军工程大学装备指挥与管理系,石家庄 050003)
0 引言
故障预测与健康管理系统在武器装备中的应用和研究日益广泛和深入,它对于解决装备维修保障滞后、效果差等问题,实现装备的视情维修具有十分重要的意义。作为信息收集最重要、最基础的手段,传感器的配置是否恰当是PHM 系统中故障诊断和预测能力的决定性因素之一。传感器的优化配置主要解决两个基本问题:一是传感器类型选择问题,对装备系统进行状态监测时,测量参数的选择对故障诊断和预测结果影响较大,在满足装备性能参数的基础上,从众多类型中选择理想的传感器显得尤为重要;二是传感器数量问题,传感器数量越多,越有利于状态评估的准确性,但会造成分析和处理的信息量增大,影响系统的效率和质量,传感器数量过少,则会造成获取信息不全,可能引发虚警和漏检等问题。
传感器的优化配置是一个多目标组合寻优问题,是典型的N-P 问题,为解决此类问题,很多专家学者提出了相应的解决方法。如朱喜华等[1]为提高传感器优化配置的准确性和可靠性,在构建模型时将传感器的故障检测性能作为重要影响因素,采用二进制粒子群优化算法进行求解,仿真实例表明,该方法使配置结果的准确性和可靠性有了提高;赵宇等[2]在分析了桥梁传感器优化布置问题的基础上,采用人群搜索算法进行求解,实现了传感器配置与布局的优化,并与粒子群算法进行比较,证明该方法在收敛速度和精度上有了较大提高;ManoharShamaiah 等[3]利用贪婪算法研究了资源受限传感器网络中的传感器选择问题,用仿真实验证明了此方法具有更好的性能;ZUO J Y 等[4]为解决地铁制动系统故障诊断中传感器的配置问题,采用有向图(SDG)方法对传感器组合配置进行优化,并用贪婪算法求解了集合覆盖问题,结果表明该方法可以减少传感器的冗余。
通过前期学者的研究,传感器优化配置问题相较于传统的依赖于专家知识和经验的配置有了系统的理论指导。但是,所使用的粒子群算法等智能算法依然存在着收敛速度不快、精度不高和容易陷入局部最优等问题。由于蚁群算法是一种算法框架,可针对不同问题进行用到不同问题之中,具有可解决至今未找到精确有效算法问题的独特优势,因此,本文将蚁群算法用于求解传感器的优化配置问题,并在构建优化模型时考虑了传感器的失效情况,从而提高了优化结果的准确性和可靠性。通过实例分析,在满足传感器优化配置目标的情况下,可通过该方法选择具体的传感器,即解决了传感器类型和数量选择问题。
1 导弹发射车调平起竖系统故障—传感器相关性矩阵及检测能力分析
1.1 导弹发射车调平起竖系统控制分析
调平起竖系统的主要任务是在完成导弹发射车进入或撤出阵地时,使筒弹在调平、起竖精度达到要求的情况下,快速、平稳地实施展开和撤收动作,是实现导弹发射的关键环节之一。系统主要由液压系统、车体、监测元件、控制元件、比例阀、起竖油缸、紧缩油缸、平衡阀和起竖机构等部件组成,其回路控制如图1 所示。
调平起竖系统由调平和起竖两部分组成[5],分别为调平系统和起竖系统。调平系统中主要依靠液压系统执行,控制量为4 个比例阀的阀芯位移,通过4 个液压支腿完成车体的水平度调节,水平度由两轴处配置的水平传感器进行测量,并将测量信息反馈给控制器;起竖系统同样依靠液压系统执行,控制量为起竖比例阀的阀芯位移,通过起竖油缸完成发射臂角度和角速度的调节,发射臂的角度由角度传感器测量,并将测量信息反馈给控制器。
1.2 调平起竖系统故障—传感器相关性矩阵

图1 调平起竖系统回路控制图
PHM 系统以减低使用和保障费用、提升装备完好性和任务成功率为目的,其效果很大程度上依赖于传感器获取的状态信息。为确保传感器对装备故障状态的全面覆盖和有效辨别,这就要求必须对影响装备可靠与安全运行的因素进行故障模式与影响分析(Failure Modes and Effect Analysis,FMEA),主要内容包括:各系统的功能、故障模式、故障原因和故障影响等[6]。通过FMEA 所提供的故障信息,明确各关键部位可能会发生何种故障,决策人员可以找出可能发生的原因及位置,基于此建立系统故障模式与传感器相关性矩阵[7]。
通过已有的导弹发射车调平起竖系统研究[8~9],并通过FMEA 分析,该系统中存在油缸泄露、分流集流阀不同步等8 种影响较为严重的故障,可用故障集F=[f1,f2,…,f8]进行表示。为对上述8 种故障进行状态评估,需要对多种特征参数进行检测。根据以往经验可初步选定压力、流量、位移等8 种传感器建立感器备选集S=[s1,s2,…,s8],则该系统的故障-传感器相关性矩阵可记为D=[dij],i=1,2,…,8,j=1,2,…,8,如表1 所示。
其中,D 为布尔矩阵,dij表示故障fi能否被传感器sj检测到,若dij=1,表示能被检测到,若dij=0,表示不能被检测到。矩阵中第i 行向量Fi=[di1,di2,…,di8]描述了故障fi发生时8 种传感器检测的结果,可以看作是故障fi发生的征兆,第j 列向量Sj=[d1j,d2j,…,d8j]描述了传感器sj检测到的故障结果,可以看作是传感器sj的检测能力。故障-传感器相关性矩阵描述了系统中的故障与相应传感器之间的相关性,是进行传感器优化配置的基础。
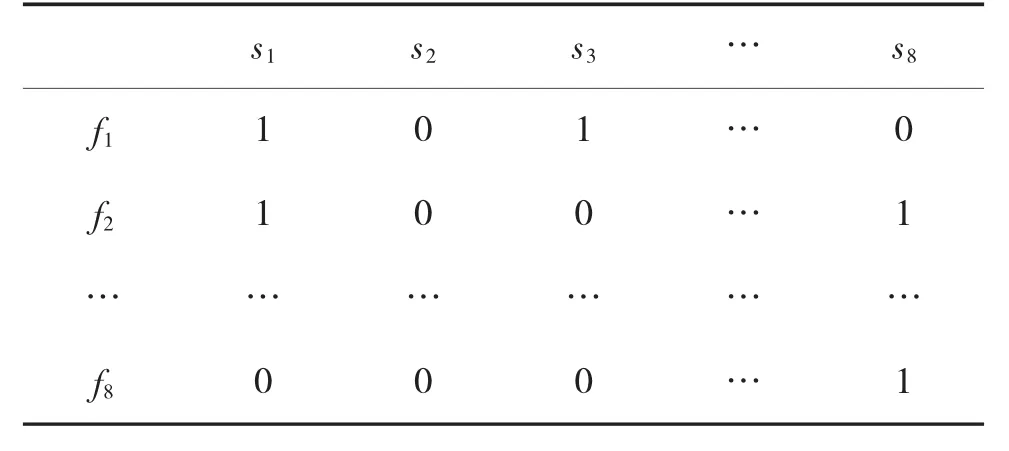
表1 调平起竖系统故障—传感器相关性矩阵
1.3 传感器检测能力分析
上节中故障-传感器相关性矩阵是在理想情况下描述的,并未考虑外界影响(环境因素及人为因素等)和传感器自身故障导致失效的问题,因此,不能准确地反映传感器检测到故障fi的实际情况,即dij=1 不能完全表示传感器sj能够检测到故障fi发生,需考虑影响传感器检测能力的内外两方面因素:

式(1)中,Iij为传感器内部检测能力[10],Eij为传感器外部影响。

式(2)中,Vij表示传感器sj对故障fi的故障检测灵敏度;SNRj表示传感器sj的信噪比;TTDij表示传感器sj对于故障fi的检测时间;TTFij表示传感器sj对于故障fi的失效时间;SyDij表示传感器sj对于故障fi的症状持续时间。
在对传感器配置进行优化时,必须要考虑其所使用的外界环境和操作使用人员的安装、使用等情况。因为即便使用相同类型的传感器,对于使用不同的安装方式和所处外界环境,其可靠度是不同的,必然会影响传感器的检测性能,可将外部影响因素作为一个折减因子Eij考虑进影响传感器检测的概率中,Eij值可根据相似工作的经验进行确定。那么,综合系统故障-传感器相关性矩阵和传感器检测能力进行考量,传感器sj对故障fi能够有效检测的概率为:

2 蚁群算法
蚁群优化算法(ACO)是一种模拟进化算法,其模拟蚂蚁的觅食行为,用蚁群在搜索食物过程中表现出来的寻优能力来解决复杂的组合优化问题[11]。蚁群优化算法的基本思路是:将蚂蚁的搜索路径作为优化问题的可行解,蚁群所有的搜索路径构成解空间。蚂蚁在其经过的路径上释放信息素,在较短的路径上释放的信息素较多,蚁群对信息素具有感知能力,会随着信息素浓度高的路径搜索。最后,蚁群在正反馈的作用下在最优路线上进行觅食,此时对应的便是最优解。
蚁群优化算法最早应用于解决旅行商问题(TSP),TSP 的目标是寻找通过n 个城市之后回到出发点的最短路径。针对传感器的优化配置问题,漏检造成的危害程度和成本最小类比于旅行距离,信息素的更新与危害程度和成本相关,其值越小,更新速度越快;n 个待选传感器类比于旅行商经过的n个城市,TSP 问题要求旅行商对每个城市旅行一次,本问题要求符合3 个约束模型的传感器组合[12]。通过上述分析得出,蚁群优化算法可以引入传感器的优化配置问题之中。采用蚁群优化算法解决传感器优化配置的基本流程如图2 所示。

图2 蚁群优化算法流程图
3 PHM 系统中传感器优化配置建模
3.1 目标模型
PHM 系统中传感器的优化配置的目的是:如果传感器未检测到故障发生,那么要使其造成的危害程度最小;另一方面,使用尽可能少的传感器,使该系统的故障检测成本最小。假设各类型传感器安装的数量为Q={q1,q2,…,qn},qj∈{0,1},各类型传感器的成本为C={c1,c2,…,cn},各故障模式的先验概率为P={p1,p2,…,pm},pi∈{0,1},危害程度为H={h1,h2,…,hm}。漏检的危害程度可以定义为:当系统发生某一故障时,传感器未能检测到该故障所造成的危害程度。可将其划分为4 级:Ⅰ-重大、Ⅱ-严重、Ⅲ-一般、Ⅳ-轻微,其取值可由决策人员根据实际情况进行确定。以漏检造成的危害程度总和最小为目标函数,其数学表达式为:

式(4)中,p_ fdi为故障fi被传感器检测到的概率,在下节约束模型中将给出其数学表达式。
对于大型复杂装备系统,需要安装的传感器数量较多,必须考虑传感器的购买、安装、维护、数据采集和处理等费用。以传感器系统的总成本最小为目标函数,其数学表达式为:

对于多目标优化问题,可根据目标值之间能否相互补偿分为补偿模式和非补偿模式。补偿模式允许目标间的补偿和替换,因此,会存在对于某些目标非常优,而对于其他目标非常差的解,这种方式往往不符合要求。非补偿模式不允许目标间的补偿和替换,不会为优化某一目标而损失其他目标,可依靠加权求和对给定的目标进行优化,将多目标转化为单目标。
经加权求和后,传感器优化配置的目标函数为:

式(6)中,w1、w2分别为漏检危害程度和总成本的权重系数,其具体数值大小可由决策人员根据实际情况而定。
3.2 约束模型
故障fi的检测率可以描述为:当系统发生某一故障fi时,因为传感器存在发生故障概率的情况,此时故障fi被传感器系统检测到的概率。其数学表达式为:

被检测系统的故障检测率应符合相应系统故障检测率PFD指标要求,其数学表达式为:

故障fi的故障隔离率可以描述为:当系统发生某一故障fi时,因为传感器存在发生故障概率j 的情况,此时故障fi被正确隔离的概率。其数学表达式为:

被检测系统的故障隔离率应符合相应系统故障隔离率pFI指标要求,其数学表达式为:
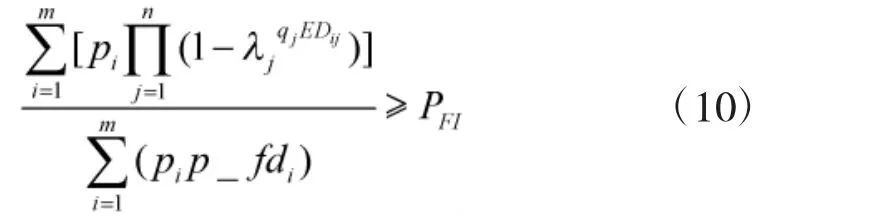
被检测系统的虚警率可以描述为:系统产生的虚警故障数目与故障报警总数之比。因为传感器存在发生故障概率j 的情况,被检测系统的故障隔离率应符合相应系统故障虚警率pFA指标要求,其数学表达式为:

综上可得,PHM 系统中传感器优化配置的目的是在满足故障检测率、故障隔离率和虚警率,即约束条件式(8)、式(10)和式(11)的情况下,使漏检危害程度和总成本,即目标函数(6)取得最小值。
4 实例分析
根据导弹发射车调平起竖系统与各传感器具体情况,假设其故障检测率指标为95%,故障隔离率指标为90%,虚警率指标为5%。赋予影响传感器故障检测能力的灵敏度、信噪比和故障检测时间等因素适当数值,结合传感器-故障相关性矩阵,得到改进后的故障-传感器相关性矩阵如表2 所示,各故障模式先验概率和危害程度如表3 所示,传感器成本及故障率如表4 所示。
按照上述目标模型、约束模型和故障监测率等指标,采用蚁群优化算法的参数设置为:迭代次数为100 次;蚂蚁数量m=10;信息启发因子α=4;期望值启发因子β=1;信息素挥发因子ρ=0.9,w1=0.7,w2=0.3,所得最优解为[1,0,1,0,1,0,0,1],即优化配置结果为{s1,s3,s5,s8},目标函数值为11.282 8,故障检测率为96.3%,故障隔离率为91.6%,虚警率为3.9%,由计算结果可以得出,各项指标均满足系统的约束条件。在初始条件相同的情况下,将蚁群算法与粒子群算法(PSO)进行对比,形成目标函数值对比曲线如图3 所示:

表2 调平起竖系统改进故障—传感器相关性矩阵

表3 调平起竖系统先验概率和危害程度

表4 调平起竖系统传感器成本和故障率

图3 PSO 与ACO 算法优化目标值对比图
在图3 中,PSO 算法相对于ACO 算法在收敛速度上较优,但由于其易陷入局部最优,得到的目标值较ACO 算法有明显的差距。
5 结论
本文在解决某型导弹发射车调平起竖系统传感器优化配置问题时,加入了影响传感器监测能力的内外两方面因素,从而对系统故障-传感器相关性矩阵进行了改进,同时将漏检危害和总成本最小进行非补偿模式组合形成目标函数,以蚁群优化算法进行求解计算。结果表明,应用本文方法对PHM 系统中装备的传感器优化配置具有一定的参考价值。
猜你喜欢
纺织科学研究(2021年1期)2021-12-03 15:04:42
中国民间疗法(2021年5期)2021-06-09 09:21:08
机械工程与自动化(2020年4期)2020-08-25 02:06:58
电子制作(2019年22期)2020-01-14 03:16:52
传媒评论(2019年5期)2019-08-30 03:50:18
时代英语·高一(2019年1期)2019-03-13 10:29:48
森林工程(2018年4期)2018-08-04 03:23:38
航天工业管理(2017年4期)2017-05-12 01:16:35
中央民族大学学报(自然科学版)(2016年3期)2016-06-27 07:55:32
南都周刊(2015年4期)2015-09-10 07:22:44