一种无人机连发型电磁弹射系统的设计*
2021-06-11 00:53:04孟庆富
火力与指挥控制 2021年4期
王 湘,吴 峻,孟庆富
(国防科技大学智能科学学院,长沙 410073)
0 引言
随着现代科学技术的飞速发展,战争信息化、自动化程度不断提高,无人作战已经成为未来战场的主要形式,无人机作为一种迅速发展的新型信息化武器装备,在现代战争中有着举足轻重的地位[1]。特别是近两年,随着人工智能的不断发展,无人机作战样式逐渐由“单打独斗”向“集群智能”发展[2],无人机集群形成规模优势,具有极佳的战场生存能力和任务完成能力,美国空军研究室(AFRL)的Bruce T.Clough 等通过研究表明,采用无人机集群作战可以用来完成在复杂对抗环境下的协同搜索、协同干扰、协同攻击、集群对抗等任务[3]。无人机集群必将成为未来无人机系统应用的重要作战样式。
由于其续航时间长、运载能力强,固定翼无人机已经在无人机集群作战领域得到了广泛运用。但是,固定翼无人机在不同环境、不同场地的起飞问题使得其对起飞方式有较高的需求,迫切需要有一种通用性强、安全性高、响应迅速的起飞方式来提高战斗力。
目前无人机集群起飞方式有:空中投放、多管火箭助推、多弹射器同时弹射多架无人机。例如,由美国国防预先研究计划局(DARPA)启动的“小精灵”项目[4]采用空中投放的方式发射和回收无人机,但空中投放对空军基地依赖性高,且发射成本较高,独立作战能力不强[5];美国无人机方案公司(UAV Solutions)开发的平台发射小型无人机的系统[6],以及美国海军研究局公布的名为LOCUST“蝗虫”的新型装备属于发射管发射小型无人机,其整个发射装置具备较强的机动性和隐蔽性[7],但只针对尺寸小、重量轻的折叠翼无人机,不适用于固定翼无人机,且采用火箭助推的方式,存在起飞发射能耗大、受火工品的制约和安全性差等缺点;中国电子科技集团公司通过多弹射器的方式成功演示了固定翼无人机的密集弹射起飞试验[8],该试验存在占地面积大、机动灵活性差、维护运输费用高等缺点,需要大量弹射器同时弹射无人机,无法根据任务需求灵活增加无人机起飞数量,不能满足现代战争快速、机动、灵活的要求。
固定翼无人机的弹射起飞方式主要有气/液压弹射和火箭发射方式[9],其中,气/液压弹射器需要复杂的液压或气压系统,功率密度低,连续弹射响应时间长,从弹射完毕到下一次弹射时间为3 min~6 min[10],无法适用于无人机快速连续地弹射起飞;火箭发射方式需要管理火工品,且成本高。而新近发展的电磁弹射具备装置简单、结构紧凑、维护简便、功率密度高、弹射间隔短、编程可控的特点,可适用于不同机型的无人机起飞,相比较气/液压弹射,电磁弹射更适用于无人机连发型弹射系统。因此,本文针对固定翼无人机集群作战起飞装备的不足,提出了一种无人机连发型电磁弹射系统,考虑到战场条件复杂,需具备较强的机动性[11-14],在电磁弹射基础上,设计了一种车载弹射系统,以实现随时随地的全自动化连续快速弹射起飞中小型固定翼无人机。
1 连发型电磁弹射系统性能指标分析
1.1 技术指标及其分析计算
以协同搜索任务为例,将“不死鸟”无人机作为连续弹射起飞的目标。“不死鸟”无人机全重180 kg,巡航速度120 km/h。根据要求,连发型电磁弹射系统主要技术指标如下[15]:
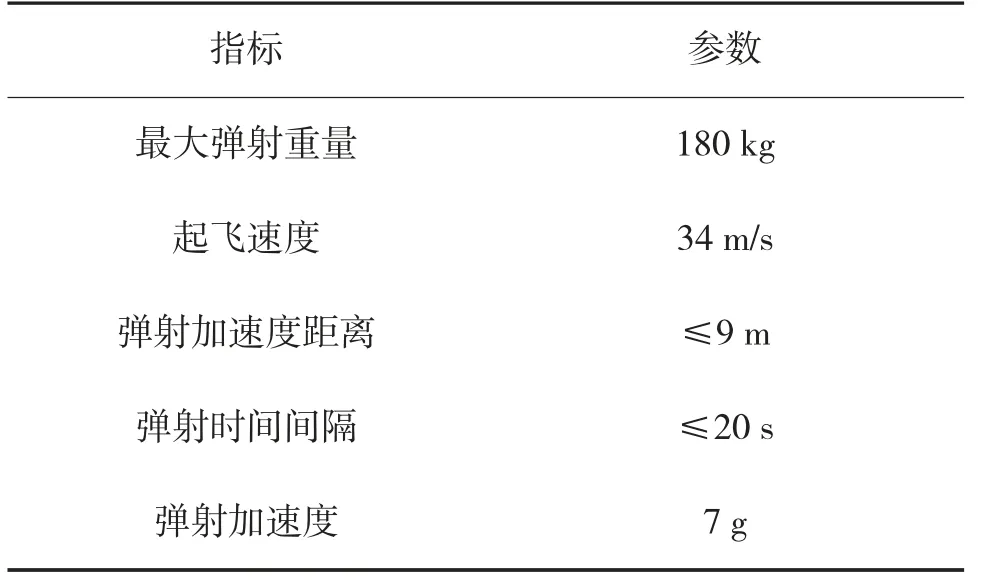
表1 连发型电磁弹射系统技术指标
以恒加速方式弹射起飞无人机,设加速度为a,无人机质量为M,动子和支撑架质量为m,不考虑弹射轨道的倾角。设Fe表示电磁推力,fd为飞机受到空气的阻力,ff为电磁弹射器动子的摩擦阻力。则飞机在加速过程中的动力学方程为:
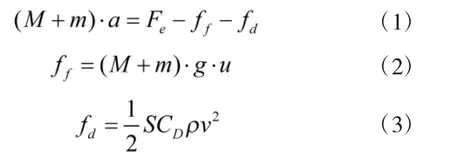
其中,S 为机翼面积,CD为阻力系数,ρ 为空气密度,u 为轨道摩擦系数,v 为无人机的速度。u 取0.01,ρ为1.225 kg/m3,M 为180 kg,m 为20 kg。S=2 m2,CD=0.1,计算得到飞机所受空气阻力为141.61 N。
若飞机以7 g 的加速度进行加速,飞机的末速度为34 m/s,由:

得加速距离x=8.42 m,加速时间:

得t=0.48 s,Fe=14.166 kN。
电磁弹射器的电磁推力计算公式为:

Z 为电机初级铁心槽数,N 为电机初级绕组匝数,Im为电机初级绕组导体内通入的电流,Bgm为电机次级永磁体在气隙中产生的磁感应强度,L 为电机初级电枢绕组导体纵向长度。计算得电流的大小为1 760 A。
电磁弹射器提供的最大功率为:

考虑电机的效率和裕量,设定电机峰值功率为600 kW,则电机所需的供电电压为340 V。
1.2 工作特性
连发型电磁弹射系统用于在短时间内将一定数量的无人机连续弹射起飞,电磁弹射电机为加速-制动-拉回的工作状态[16],其弹射时间短,一般为秒级。通常对弹射物以恒加速度方式进行加速,以避免推力波动过大对无人机造成破坏。单次弹射起飞完毕,采用反接的方式将电机动子拉回。图1为连续弹射工况下所提系统的电机功率-时间曲线,弹射一次所需时间为0.48 s,弹射完毕后,电机动子和支撑架回到起点,并且重新装载无人机的时间为弹射间隔tp,它可根据弹射指标要求进行设定。图中可以反映出该系统具有固定时序的工作特点。
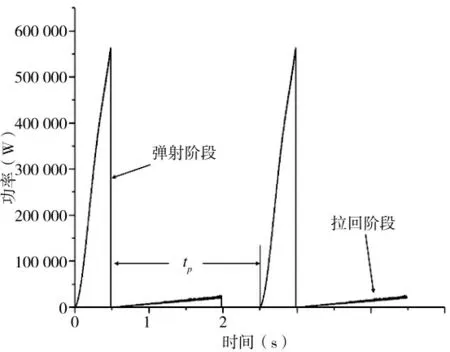
图1 连续弹射电机功率-时间曲线
2 连发型电磁弹射系统方案的设计
如图2 所示,系统包括弹射电机、无人机机库、驱动器和储能模块以及控制系统等5 个主要部分。

图2 连发型电磁弹射系统方案
其中,弹射电机作为执行机构,为无人机提供加速的推力;控制系统通过检测的位置信号,电压,电流等参数,实现对弹射电机和无人机机库的控制;机库用于存贮和运输无人机;驱动器驱动电机;储能设备为系统提供能量。
2.1 弹射电机
弹射电机主要由永磁体阵列、电枢铁芯、支撑弹射平台及分布在两端的位置传感器组成。传感器的作用是检测无人机支撑弹射平台的位置,实现弹射平台在弹射与拉回之间状态的切换,从而实现连续弹射,提高弹射效率。

图3 弹射电机结构
2.2 机库
机库是一种集无人机贮存、运输的箱式结构,包括机械箱体框架、PLC 电控系统、机电控制系统等。平时可以贮存一定数量规模的无人机,提高了无人机的维护性和可靠性;战时可由传动系统连续向电磁弹射器装填无人机,实现无人机连续弹射起飞,具有较强的战时反应能力。根据集群弹射起飞的指标,合理设计系统结构、尺寸以保证空间利用率和系统的机动性。
如图4 所示,机库机械结构主要包括:伺服电机、齿轮齿条、减速箱、齿轮齿链和装夹适配结构。其中,伺服电机通过减速箱驱动齿轮,在齿条方向进行垂直方向运动;伺服电机通过减速箱驱动齿轮,并带动链条进行水平方向运动;装夹适配结构能够解决无人机从机库到弹射器的过渡精准装夹的问题。每弹射一架无人机,弹射架复位,机库及传送带自动将无人机架设在弹射器上,再进行二次作业,能实现无人机连续批量弹射,同时又能实现自动化弹射。
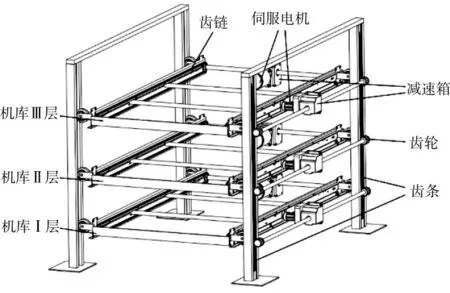
图4 无人机机库立体图
2.3 驱动器
驱动器驱动永磁无刷直流弹射电机,由6 个全控性功率器件组成三相全桥交流电路。根据连发型电磁弹射系统的工作特性,电磁弹射器加速距离有限,弹射电机的工作电流大,且连续弹射。在完成一次弹射后,需反向运行将电机动子拉回至初始位置。连续工作条件下,需要考虑外加散热器将功率器工作所产生的热量散出。
2.4 储能设备
本系统具有周期性和秒级脉冲大功率输出的特点,20 s 内弹射一次,存储的能量能够支撑弹射起飞机库中所有的无人机,这就要求储能设备具有较大的功率密度和能量密度。
储能采用超级电容与蓄电池组合的方式,其中,蓄电池提供稳定低频的平均功率,超级电容迅速提供负载剩余部分的高频功率的。在提高功率密度和能量密度基础上,这种组合能有效缩短弹射周期的充放电时间,提高电磁弹射速率,有效降低蓄电池放电电流,延长蓄电池使用寿命。
2.5 控制系统
根据设定的参数和负载条件实现对弹射电机和机库的控制,使弹射电机与无人机机库协调工作,按照设定的方式完成连续弹射起飞的任务。
弹射电机的控制包括:对动子位移的检测,通过传感器检测的位移信号,作为电机换相的输入。同时,也包括对弹射电机的电气参数的检测,为弹射电机的闭环控制提供参量,并且是驱动保护的基础;微处理器有单片机、ARM 和DSP。这3 种微处理器中DSP 的资源和功能十分强大,并且拥有很高的运算速度和精度,可以实现复杂的控制算法,能够实现对弹射电机的实时控制。
机库的控制:这是一种过程控制系统,随着可编程逻辑控制器(PLC)的广泛应用[17],与单片机相比,其抗干扰能力强、故障率低,易于设备的扩展,便于维护,因此,可采用PLC 实现控制系统。根据连发型电磁弹射系统的自身特点,将PLC 的接口与计算机的串行口连通[18],触摸屏作为人机交互接口(HMI),对系统进行监控,包括查看各元件工作状态以及系统运行状况,并发送运行控制命令。
2.6 系统方案分析
该系统方案具有一定的理论依据,在准备阶段,通过PLC 控制系统控制无人机机库机械结构,实现从机库到弹射电机的装填;发射时,按照储能设备的固定时序或传感器对弹射电机动子位置检测依次触发放电,并且通过驱动器产生三相电流。可以看出,连发型无人机电磁弹射系统只要输入足够的周期性电流,完全可以实现弹射电机的连续弹射。无人机连发型电磁弹射系统组成如图5 所示,系统通过PLC 控制伺服电机的启停,实现无人机机库的传输功能,并控制弹射电机动作,各分系统之间必须相互协调、高度统一、充分发挥各自效能,达到无人机连续弹射的高效率、高精度。
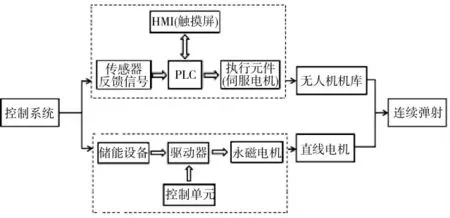
图5 无人机连发型电磁弹射系统框图
3 控制系统与储能系统的设计
3.1 PLC 控制系统的设计
PLC 控制系统需在弹射间隔时间内,从机库中快速移动无人机,并装填到弹射器上,具体控制流程如图6 所示。
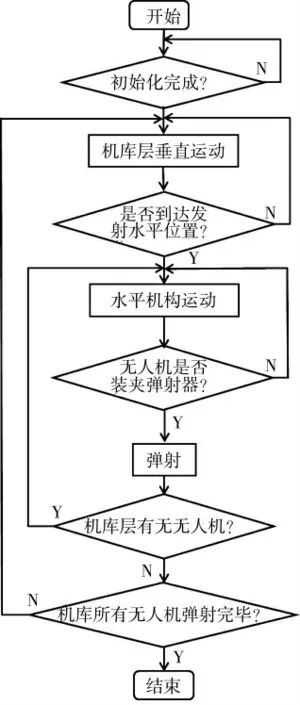
图6 控制系统流程图
传送过程是关键环节之一[19]。布置光电传感器对无人机的弹射状态进行判断,若处于未弹射状态,可通过两自由度的机库运动将无人机装夹固定至弹射器。运用PLC 电控系统控制伺服电机的启停,并通过增加PLC 的模拟量模块控制伺服电机PWM 占空比,从而实现机库平台的加(减)速运行。采用Siemens s7-200 型号的PLC 控制器,其中的EM253 模块能够产生高速脉冲对伺服电机的位置或速度进行控制。
3.2 混合储能系统的设计
根据系统的工作特点,设计混合储能系统的方案,具体为:弹射准备阶段,利用蓄电池给超级电容补充充电;弹射起飞阶段,采用蓄电池和超级电容同时向弹射电机供电;制动阶段,通过能量回馈过程,将多余的功率回馈至超级电容;弹射电机动子返回阶段,蓄电池为弹射电机供电并将电机动子拉回至初始位置,同时也给超级电容充电。这种方式可避免蓄电池长时间大电流的放电,延长蓄电池使用寿命,克服了蓄电池单独供电无法应对大功率波动、超级电容单独供电无法长时间持续工作的缺陷。
图7 所设计的蓄电池- 超级电容混合储能系统拓扑结构,蓄电池与超级电容分别通过双向DC/DC 变换器连接到直流母线,蓄电池与超级电容充放电功率能够完全解耦,实现合理控制。首先通过基于模糊控制的能源管理策略,根据电机负载实时功率、蓄电池荷电状态和超级电容荷电状态进行功率分配;并设计用于混合储能的充放电电路拓扑结构及其控制策略。利用超级电容对直流母线实现恒压控制。图8 为基于模糊控制的混合储能系统工作原理。
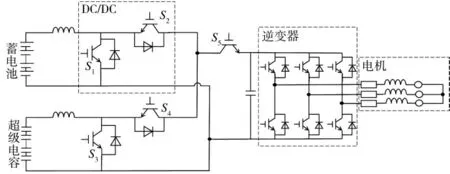
图7 混合储能系统拓扑结构
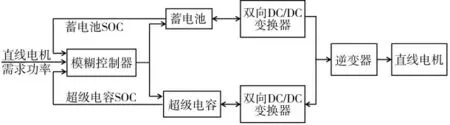
图8 混合储能系统工作原理
为实现上述功能,在整个混合储能系统中设计了3 个控制器,其控制原理图如图9 所示。
控制器1 通过采集蓄电池的放电电流与放电电压,根据负载功率在低频分量检测以及模糊控制器得出的功率信号,得出蓄电池的实时放电电流大小;控制器2 采集负载的直流母线电压以及超级电容放电电流,根据给定电压值来实现直流母线电压的稳定;控制器3 采集超级电容电流和给定电流值,实现蓄电池给超级电容恒流充电。
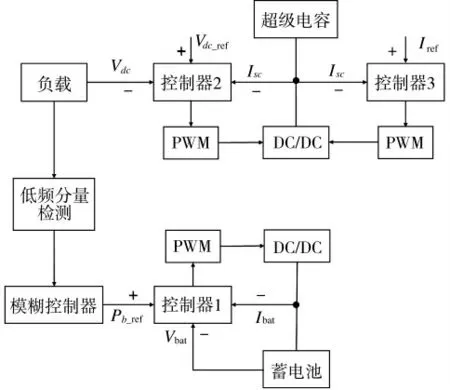
图9 混合储能系统控制原理图
为了使无人机分离后弹射台能在较短的距离实现平稳制动,并且有效地回收利用能量,回馈制动可以将机械能转换为电能回馈到储能装置。在制动条件下,保证双向DC/DC 变换器开通,采用超级电容吸收回馈能量。
相比较蓄电池单独供电的储能系统,此方案明显减少了蓄电池的使用数量,提高了储能系统的功率密度,提高了系统的机动性;并且有效减小超级电容的放电电量,减少了蓄电池给超级电容充电的时间,从而有效缩短弹射周期,提高连续弹射速率。
4 仿真分析
本设计通过传送机构把固定翼无人机从机库快速装填至弹射器的过程,来验证整套基于PLC 的无人机机库控制系统的可行性。控制传送机构的PLC 梯形图程序如下页图10 所示。
仿真测试结果表明,本控制系统能够实现对传送机构的准确控制,可以完成实际应用中的一些基本实用操作。且整个控制系统操作简单、性能良好,满足连发型无人机电磁弹射系统的应用要求。
并在Matlab/Simulink 中搭建仿真模型,分别仿真蓄电池与超级电容同时放电和超级电容组恒压放电,以及电机的回馈制动。
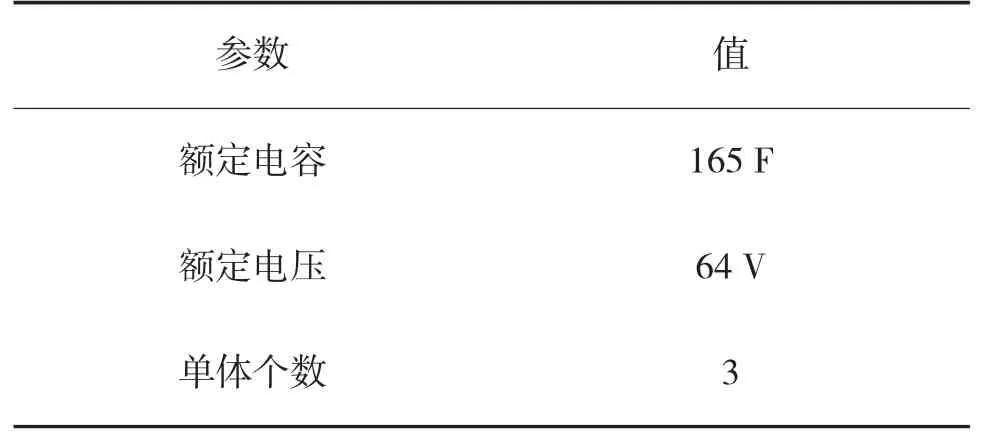
表2 仿真用超级电容参数

图10 PLC 梯形图程序
首先基于模糊控制对连发型电磁弹射器的负载需求功率进行功率分配,如图11 所示。
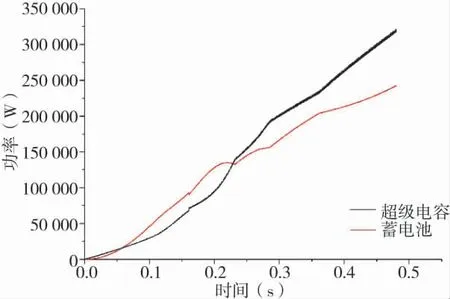
图11 基于模糊控制的需求功率分配结果
再分别对采用单一超级电容组和混合储能系统以及能量回馈制动进行仿真,得到超级电容电压,如图12、图13 所示。

图12 弹射阶段超级电容电压
从仿真结果来看,超级电容从满电压状态到进行一次弹射后端电压分别变化为153.3 V 和163.2 V。

图13 制动状态下的超级电容电压
对于仿真所用的连发型电磁弹射器,如果仅用蓄电池供电,用12 V、100 Ah 的铅酸蓄电池,单个重量为38 kg,则需要29 个蓄电池串联使用,且单个蓄电池的放电电流达到1 760 A。而采用本文所设计的混合储能系统,所需17 个蓄电池进行串联,以及3 个超级电容串联使用,每个超级电容的重量为13.7 kg,再加上两个双向DC/DC 变换器的重量为80 kg,则总重量为767.1 kg,达到了提高功率密度的目的。
5 结论
设计了一种固定翼无人机车载连发型电磁弹射系统,结论如下:
1)将弹射电机、无人机机库、驱动器、储能设备和控制系统集成,实现自动化操作,同时也将贮存运输弹射集于一体,可实现无人机机动、快速、连续弹射起飞。
2)PLC 电控系统的运行效率和功能实现直接关系到系统的作战效能,需合理设计硬件和软件。
3)采用蓄电池与超级电容组合的混合储能系统,能够减小超级电容的放电电量,缩短充放电时间,提高电磁弹射速率,并且能有效提高系统的功率密度,增加系统的机动性。
4)系统可以解决无人机集群弹射起飞方式存在的局限性问题,对集群作战实现有力支撑。
猜你喜欢
指挥控制与仿真(2021年3期)2021-06-15 07:20:06
航空维修与工程(2019年3期)2019-09-10 07:22:44
兵器知识(2017年2期)2017-02-21 17:44:43
米娜·女性大世界(2016年8期)2016-08-17 17:15:15
Coco薇(2016年5期)2016-06-03 08:53:30
爆笑show(2015年9期)2015-10-24 15:03:28
海军航空大学学报(2015年4期)2015-02-27 13:45:56
教练机(2011年3期)2011-01-14 16:15:22