转矩脉动触发的牵引逆变器模型预测控制
2021-06-10 05:39:32向超群欧阳泽铿成庶
电机与控制学报 2021年5期
向超群, 欧阳泽铿, 成庶
(中南大学 交通运输工程学院,长沙 410075)
0 引 言
随着高速列车技术的进一步发展,对牵引系统的性能提出了更高的要求,1985年德国鲁尔大学Depenbrock教授提出直接转矩控制,可以较好的满足轨道牵引中功率大,开关频率低的特点[1-2]。然而,由于Bang-Bang控制的特性,可能存在转矩和磁链的高纹波,以及开关频率不固定等,这也限制了直接转矩控制的应用。近年来,模型预测转矩控制(model predictive torque control,MPTC)被引入到电机驱动的高性能转矩控制中。MPTC与直接转矩控制相比,直接用精确的模型预测下一时刻电磁转矩、定子磁链等相关变量的变化。通过评估每个电压矢量的影响,选择使代价函数最小的电压矢量,作为下一时刻的输出,因此,MPTC在矢量选择方面的准确性和有效性都高于直接转矩控制[3-7]。传统的有限集模型预测转矩控制(finite set model predictive torque control,FSMPTC)虽然具有优越的性能,但由于在一个采样周期内只使用一个电压矢量,仍然存在较大的转矩脉动,这在低采样率时,尤为明显。电力牵引由于开关频率较低,当转矩偏差过大时,MPTC无法在一个周期内实现无差拍控制[8-9]。
为了提高FSMPTC的性能,许多学者提出了不同的策略。文献[10]中缩短采样时间可以获得满意的稳态性能,但需要一个更快速的计算平台,并且会增加系统的成本。利用合成虚拟矢量的方法增加可供选择的电压矢量,使FSMPTC具有更大的控制灵活性,从而在稳态下获得满意的性能[11-13]。随着电压矢量的增多,转矩可调节的范围增大,同时转矩脉动也得到更好的抑制。但与传统的MPTC相比,计算复杂度大大提高。此外,由于转矩和磁链控制采用精确的转子角位置,因此这些方法对转子位置的依赖性很大。
直接转矩控制(direct torque control,DTC)可以通过在一个控制周期内插入一个非零矢量和零矢量的方法来减小转矩脉动[14]。这种方法也被引入到改进传统MPTC的性能中,首先根据成本函数最小化的原则选择最优的非零矢量。然后,根据转矩无差拍的原理计算出非零矢量和零矢量的占空比[15-20]。占空比MPTC策略在电机稳态运行时可以获得更高的控制性能,降低转矩脉动,但计算量较大,特别是在多步预测或多电平变换器应用中,计算量呈指数增长[17-20]。
为了减少预测中的计算量,文献[21-28]引入了传统DTC中的开关表。根据开关表转矩和磁链的偏差输出,选择开关表中合适的电压矢量,虽然需要计算定子磁链的位置和扇区,但是这些计算量都十分简单,相当于减小的代价函数计算量,增加的十分有限[25]。但是相比于传统的DTC方法,都存在计算量增加的问题。
为了降低不必要的计算支出,同时维持良好的动态响应和稳态性能,本文提出了一种基于转矩脉动最优的触发型MPTC。通过分析基于开关表的MPTC,在此基础上,引入转矩触发条件,当满足条件时,可采用传统DTC,减少MPTC计算量,当采用MPTC时,可以降低转矩脉动。
1 牵引异步电动机动态模型
在两相(α,β)静止坐标系下,异步感应电机的数学模型可表示为:
(1)
式中:ψs为定子磁链矢量;ψr为转子磁链矢量;us为定子电压矢量;Rs为定子电阻;is为定子电流矢量;ir为转子电流矢量;Ls为定子电感;Lm为定子电感;ωr为转子电角速度。
因此,转子磁链可以表示为
(2)
利用前向欧拉法对式(1)与式(2)进行离散,k+1时刻的定子磁链与定子电流关系为
ψs(k+1)=ψs(k)+Ts[us(k)-Rsis(k)]。
(3)
(4)
根据定子磁链式(3)和定子电流式(4),可估计出电磁转矩为
(5)
同时,k+1时刻转矩预测计算的表达式为
(6)
由式(5)和式(6)可以得出控制周期内转矩的变化率与电压矢量的关系,即
(7)

由此可知,随着定子频率的提高,零矢量对转矩减弱的能力增强,正矢量增加转矩的能力减弱,负矢量增加转矩的能力也增强。
2 基于开关表的电压矢量选择
在一个周期内,传统的模型预测转矩控制仅选择一个电压矢量,同时,还需要计算代价函数7次。文献[24]通过选择相邻的矢量减少备选的电压矢量个数,可以通过开关表减少计算量。定子磁链的位置表达式为
(8)
如图1所示,在α-β坐标系中,根据式(9)划分为6个扇区,每个扇区的电压矢量开关表如表1所示,即
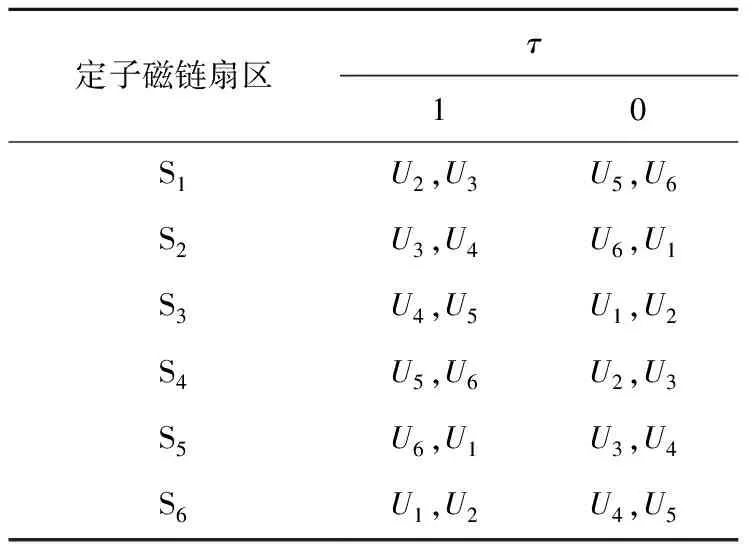
表1 电压矢量选择开关表
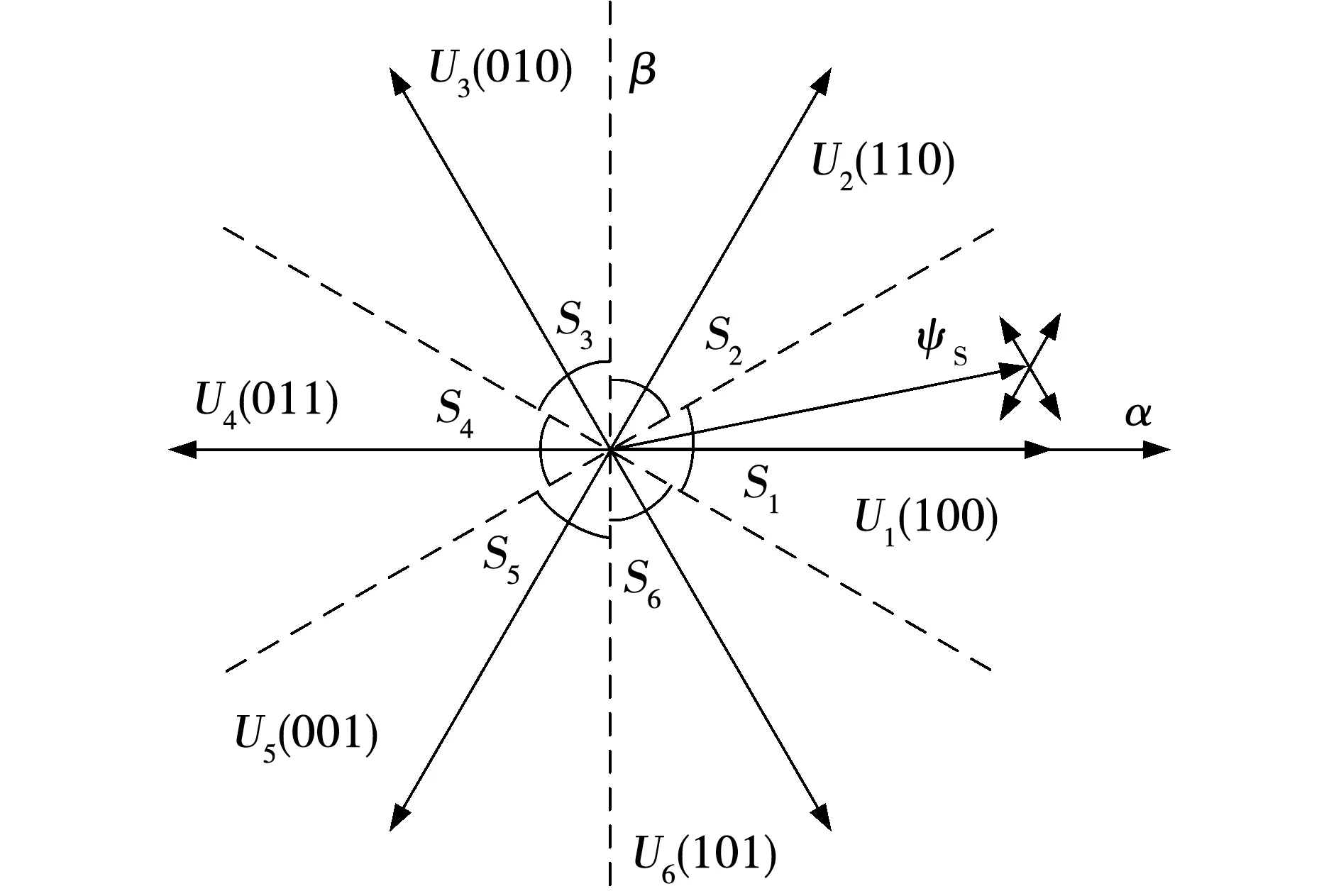
图1 空间电压矢量扇区划分示意图Fig.1 Diagram of space voltage vector sector
(2N-3)π/6≤SN≤(2N-1)π/6。
(9)
其中SN为扇区编号,N=1,…,6。
在一个周期内电磁转矩变化率Sj_T表达式为
Te_j(k+1)-Te(k)=Sj_TTs。
(10)
其中,电磁转矩Te_j(k+1)为电压矢量uj在k+1时刻的预测量。根据转矩无差拍控制原则,k+1时刻的输出转矩应等于期望转矩。因此,根据定子磁链位置可以选择最优矢量uopt1和uopt2,可以得到k+1时刻的转矩和电压矢量关系为:
(11)
各矢量的占空比计算公式为
(12)
理论上可以实现转矩的无差拍控制,但是在某些特殊的工况下(如负载突变等),输出转矩无法实时跟踪响应,此时某个电压矢量的占空比计算结果将会大于控制周期Ts。因此,需要将每个电压矢量的作用时间限制在0~Ts之间,即:
(13)
MPTC与传统DTC相比,具有更好的脉动抑制效果,但是相应的计算量也会增加。因此,可以根据转矩脉动的需求,选择不同的控制方式。本文采用转矩滞环的方法,判断选择的控制方式。当预测转矩位于滞环内,则选择传统控制方式,如果超出滞环范围,应选择两矢量MPTC减小转矩脉动。转矩滞环的宽度应根据系统所允许的最小脉动值选择。
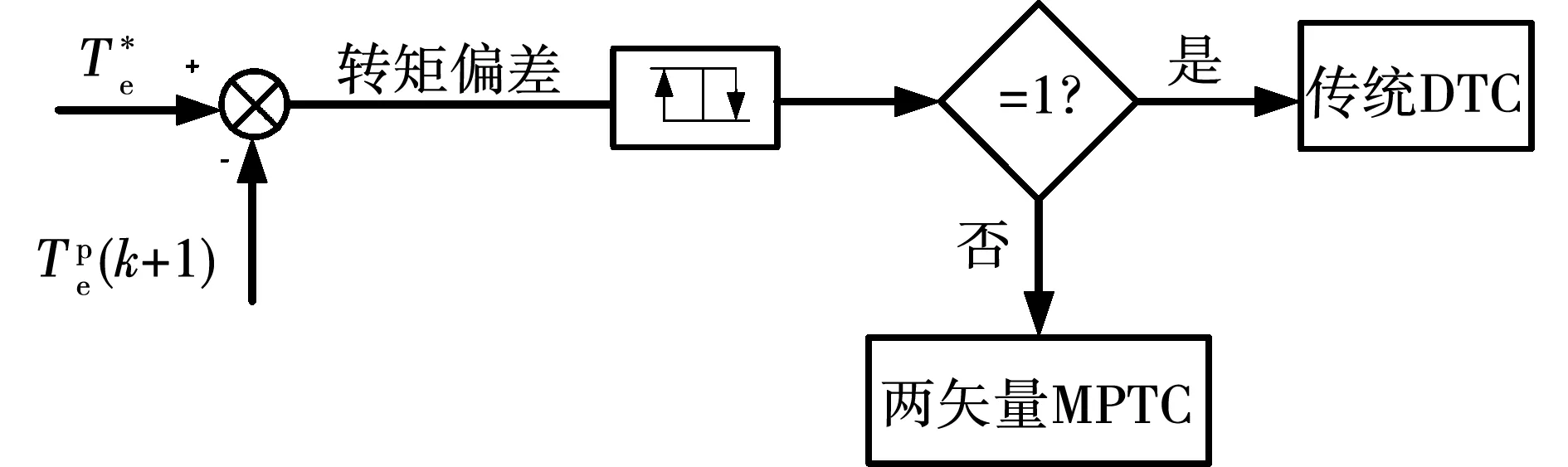
图2 转矩触发条件选择Fig.2 Diagram of selection triggered by torque
3 基于开关表的两矢量MPTC
MPTC的主要目标是跟踪电机的期望定子磁链和电磁转矩。因此,代价函数可构建为
(14)

(15)
其中,Ten和ψsn分别为额定电磁转矩和定子磁链。将电磁转矩、定子磁链和二电平逆变器的基本电压矢量状态代入到式(15)中,选择使代价函数最小的电压矢量输出。
在离散数字系统当中,计算时间是不可忽略的。在k时刻选出的最优电压矢量于k+1时刻才会发挥作用,这也就产生了一拍的滞后。如果不对滞后进行补偿,则会导致系统的性能下降,定子电流和转矩误差增大。为了减小一拍滞后的影响,需要对k+2时刻的电磁转矩和定子磁链进行预测。最优合成矢量uopt1和uopt2用于预测k+1时刻的电磁转矩Te(k+1)和定子磁链ψs(k+1),同时,两者也被看作是对k+2时刻进行预测的初始状态。而且,Te(k+1)和ψs(k+1)用于计算转子误差τ和磁链扇区。所以,通过计算下式所示的代价函数,使得代价函数最小的电压矢量作为最优矢量,即
(16)
为了防止电流过大,必须对输出进行限流,最大电流值Im,必须被包含在代价函数g2当中,即
(17)
因此,最终的代价函数可以表示为
(18)
如图3所示为本文所提出算法的原理框图,具体的实施步骤如下。
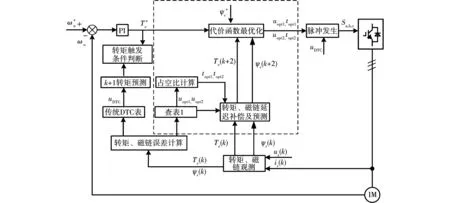
图3 基于两矢量开关表原理框图Fig.3 Scheme of proposed method based on two-vector table
步骤1:测量定子电流和电机转速,使用公式(1)和(7)估计定子磁链和电磁转矩。
步骤2:转矩估计的转矩和磁链,分别计算两者与给定值的偏差。
步骤3:利用计算的偏差,查询传统DTC表,得出最优电压矢量uDTC。
步骤4:根据最优电压矢量uDTC预测k+1时刻电磁转矩,并作为转矩触发条件的输入。
步骤5:根据转矩触发条件判断,如果不满足条件,则需进行虚线框中基于开关表的两矢量MPTC的计算,如果满足,则直接选择传统DTC开关表输出uDTC。
以下步骤为根据转矩触发条件,需要选择基于开关表的两矢量MPTC计算。
步骤6:根据转矩误差和文中的表1,选择合适的电压矢量,并计算各电压矢量的对应占空比。
步骤7:预测k+2时刻的定子磁链和转矩。
步骤8:根据代价函数选择使之最小化的电压矢量组合,并输出相应的电压矢量和占空比。
4 仿真与实验验证
为了证明文中方法的有效性,分别对其进行了仿真和实验的验证。仿真电机参数采用CRH2型车所用300 kW牵引电机。实验平台结构如图4所示,采用碳化硅二电平逆变器,利用dSPACE模拟控制器运行控制算法,上位机进行数据的显示和存储。仿真和实验采用的参数如表2和表3所示。
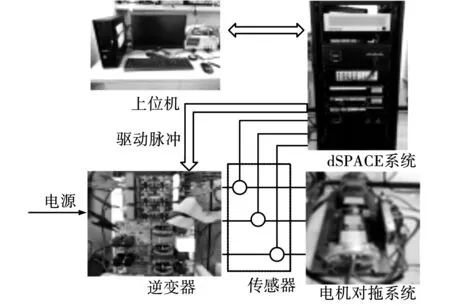
图4 实验平台结构图Fig.4 Structure chart of experiment platform
已有很多文献比较了相同条件下MPTC与传统DTC的性能,本文不再撰述。图5和图6分别为两矢量MPTC方法和本文所提方法DTC-MPTC方法的牵引电机2种不同工况的稳态仿真波形,其中图5(a)、图6(a)为转速2 000 r/min,负载 100 N·m,图5(b)、图6(b)为转速4 000 r/min,负载300 N·m。2种控制方法在转矩抑制、电流谐波和磁链控制均有相近的性能。
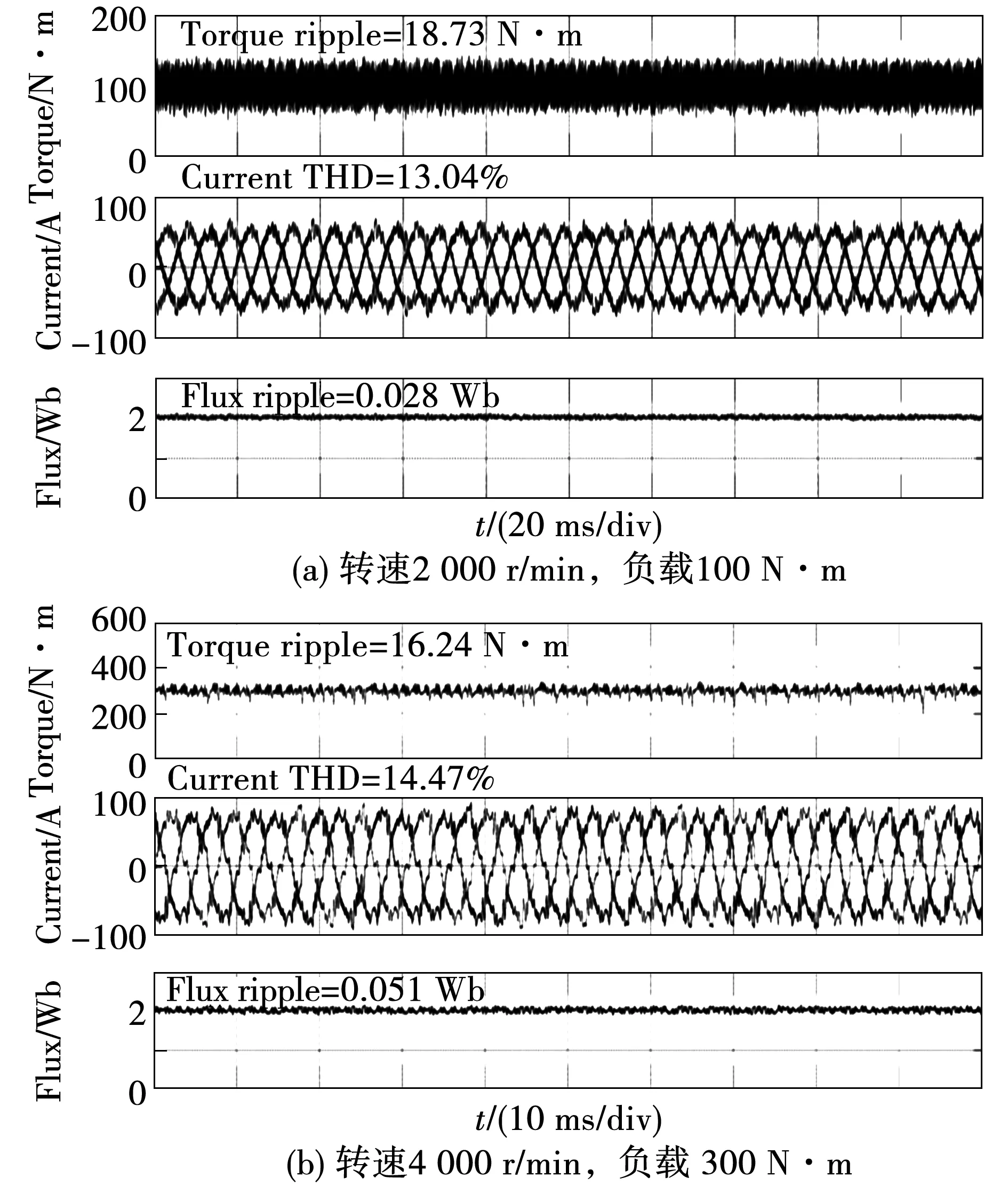
图5 两矢量MPTC方法牵引电机稳态仿真波形Fig.5 Simulation waveform of traction motor with two-vector MPTC at steady state
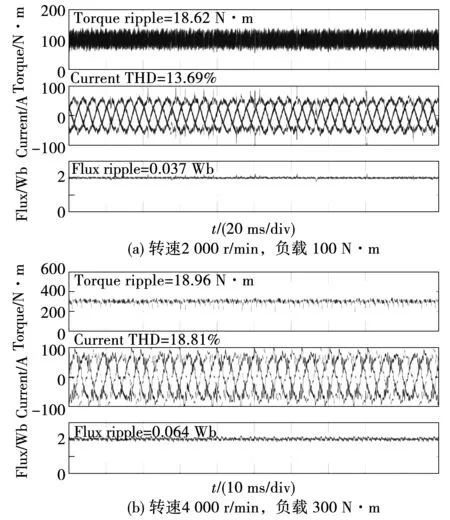
图6 DTC-MPTC方法牵引电机稳态仿真波形Fig.6 Simulation waveform of traction motor with DTC-MPTC at steady state
表3 实验电机参数
图7为不同速度和负载转矩时,2种控制方式的作用时间,其中1代表MPTC作用,0代表传统DTC作用。综合图5、6、7可以看出,在低速时,2种控制方法的稳态性能非常接近,因为在低速区域时,由于定子频率较低,零电压矢量对转矩的作用效果较小,在传统DTC控制中正有效矢量对转矩的作用效果较强,容易造成较大的转矩脉动,但是两矢量MPTC可以利用有效矢量和零矢量合成期望的电压矢量,实现无差拍控制的目标,因此在低速时,选择传统DTC作用的时间较少,约占3%。高速时,由于同等控制周期下,定子频率提高,正矢量对转矩的作用效果减弱,传统DTC方法选择的矢量引起的转矩偏差减小,而且零矢量对转矩的减小作用也随之增加,采用占空比MPTC方法时,有时无法实现转矩的无偏差控制,此时可选择DTC的机会增加,仿真中约占整个高速周期的33%。
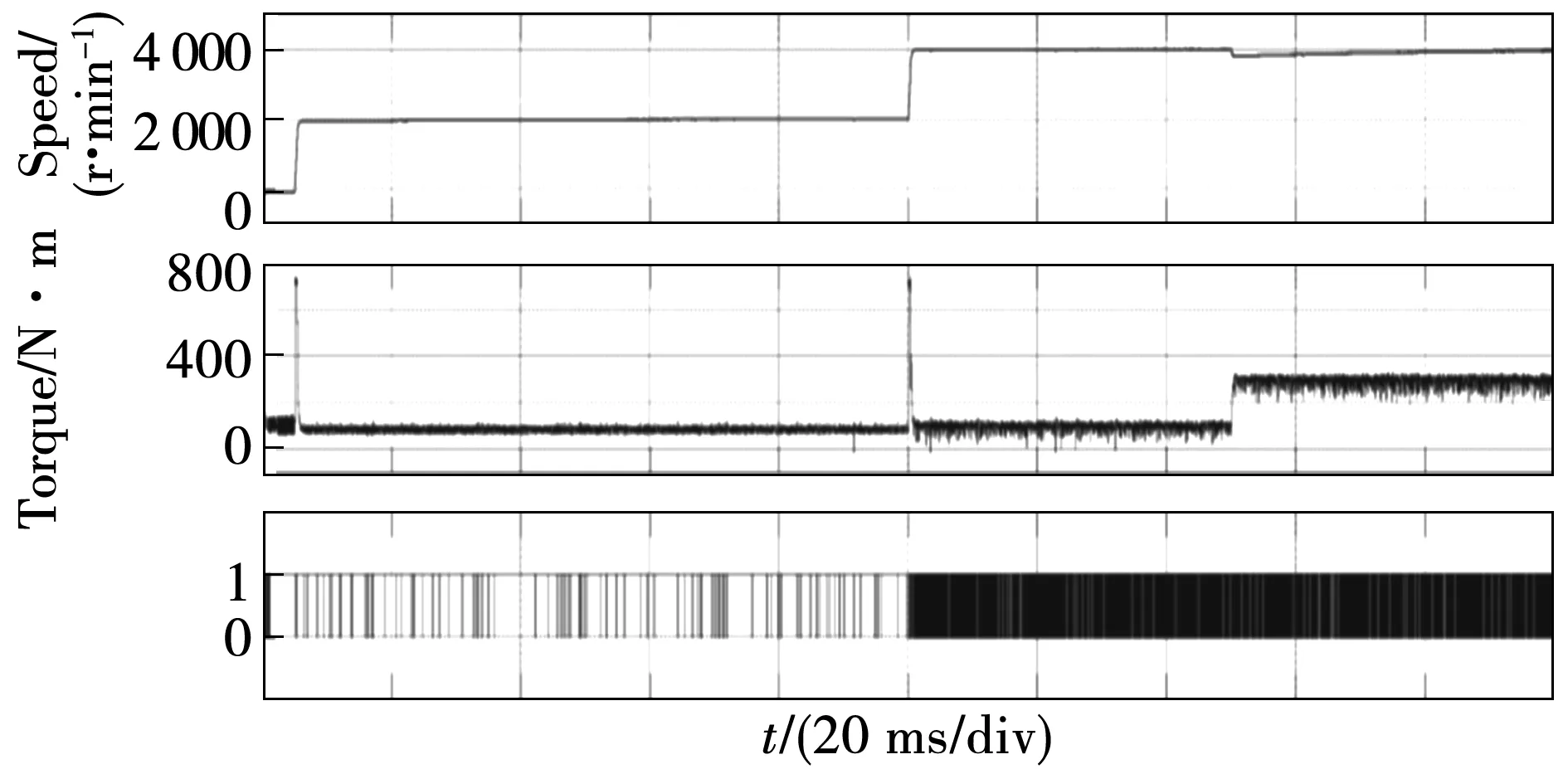
图7 DTC-MPTC 2种方法占比Fig.7 Proportion of two method DTC-MPTC
图8为2种控制方法突加负载时的动态响应,两者均具有良好的动态响应,从100 N·m负载突加到300 N·m的响应时间均约为38 ms。因此新方法没有降低系统的动态响应速度。
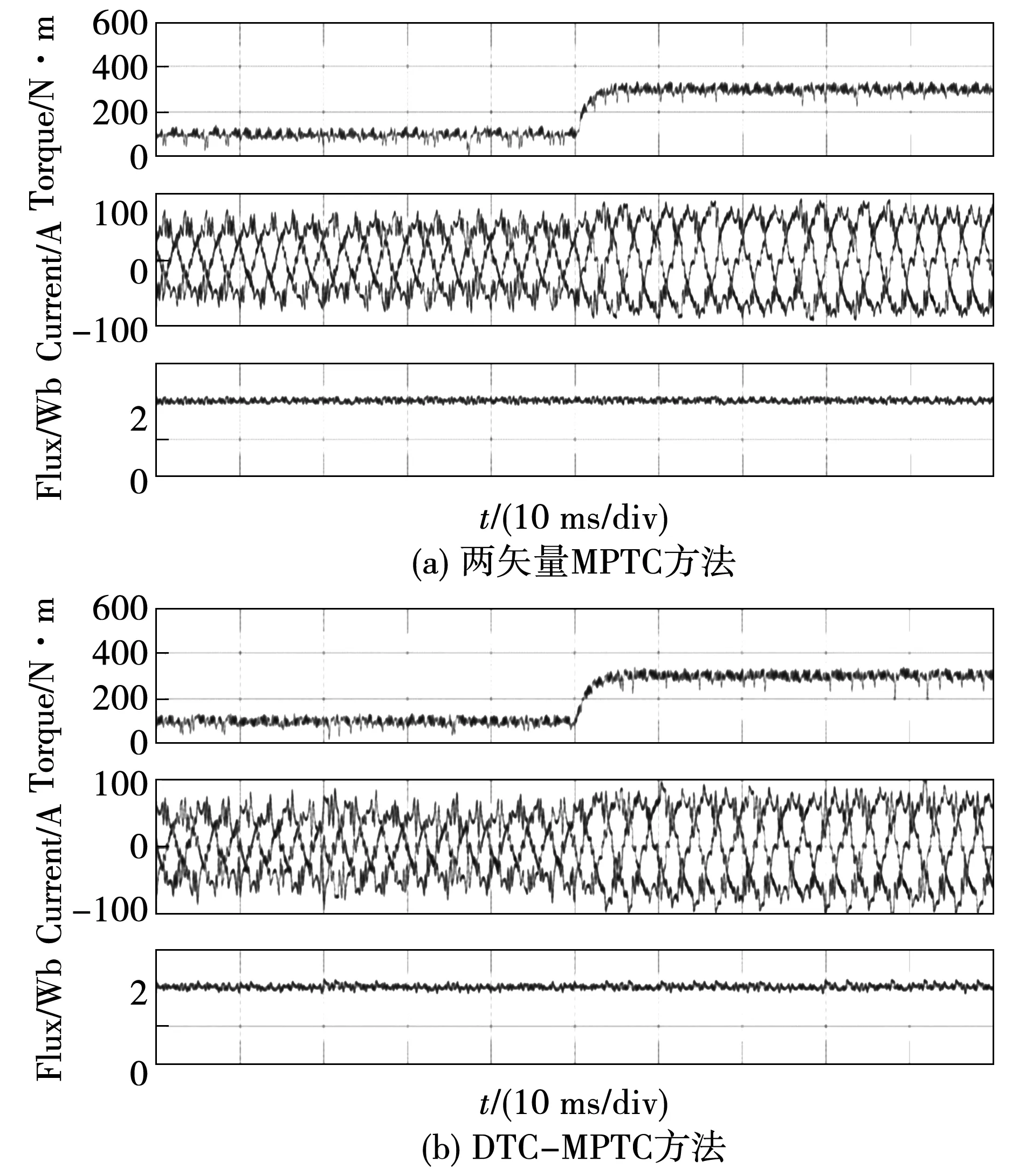
图8 牵引电机动态仿真波形Fig.8 Simulation waveform of traction motor at dynamic state
为了进一步验证方法的有效性,在实验室搭建的2.2 kW电机平台进行了实验验证。图9为电机从额定转速1 440 r/min反转的实验波形,从图中可以看出,2种方法都能较好的跟踪给定,在过渡的时候均未出现较大的尖峰,能顺利实现反转。在转换时,磁链出现了波动,是因为两矢量MPTC方法在选择矢量时,优先考虑转矩的作用,只通过磁链权重系数选取矢量。可以通过增大磁链权重系数减小过渡时的磁链波动。
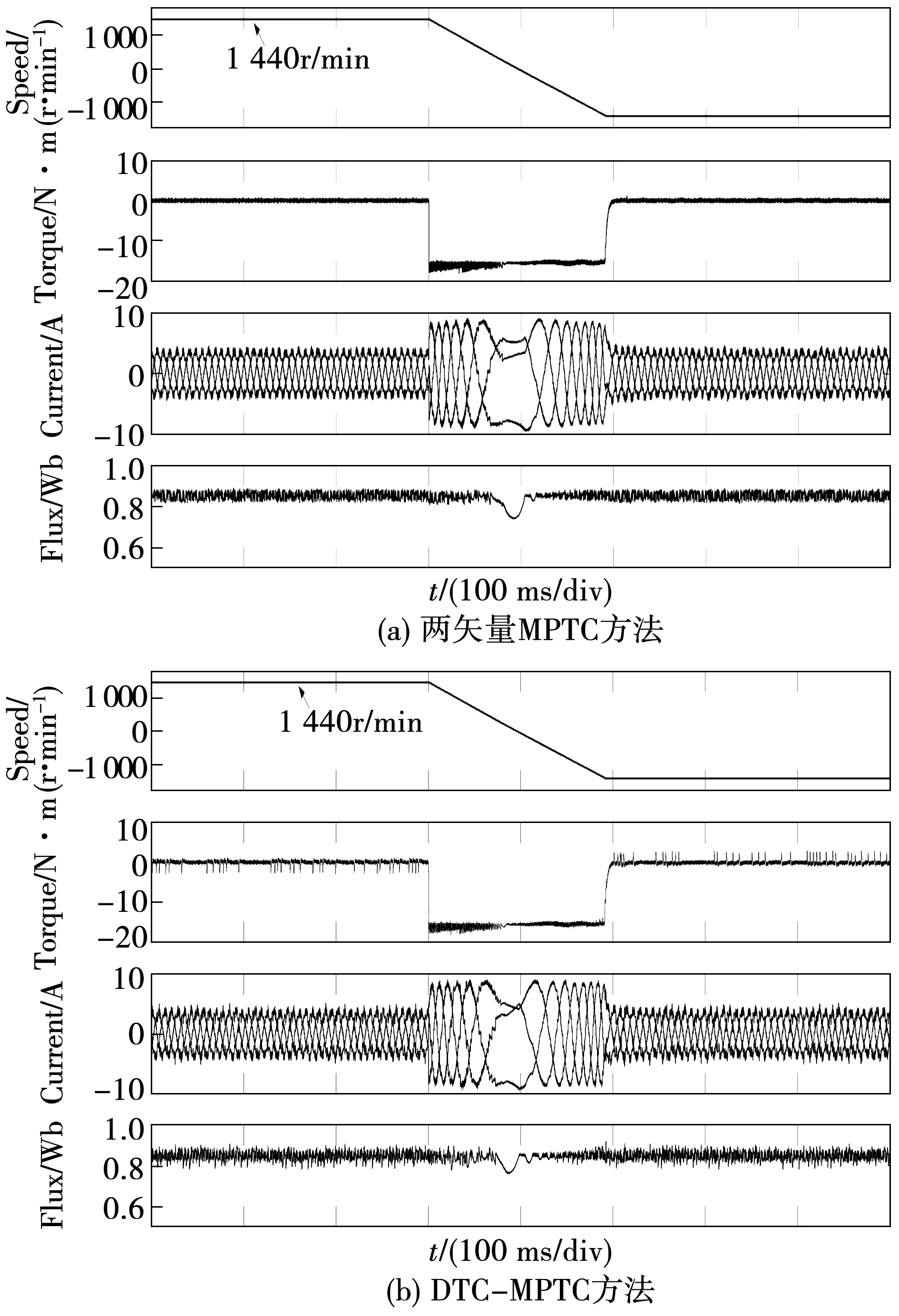
图9 电机正反转实验波形,其中正反转速度均为1 440 r/min,负载为0Fig.9 Experiment waveform of positive and negative rotation of motor when speeds are both 1 440 r/min and loads are 0
由于在低速时,选择传统DTC控制的时间较少,在低速时,DTC-MPTC方法基本等同于两矢量MPTC,因此,在此不做两者的对比分析。图10和图11分别为2种控制方法在额定转速时,不同负载的稳态性能,2种方法均能获得较好的控制性能,虽然DTC-MPTC方法在各项指标中均有微弱的差距,但是可以减小系统计算量,尤其对于绝大部分时间运行于高速区域的高速列车,优势十分明显。图10为2种方法的动态响应实验波形,两者均具有较好的动态响应特性,动态响应时间约为5 ms,能跟踪负载突变。
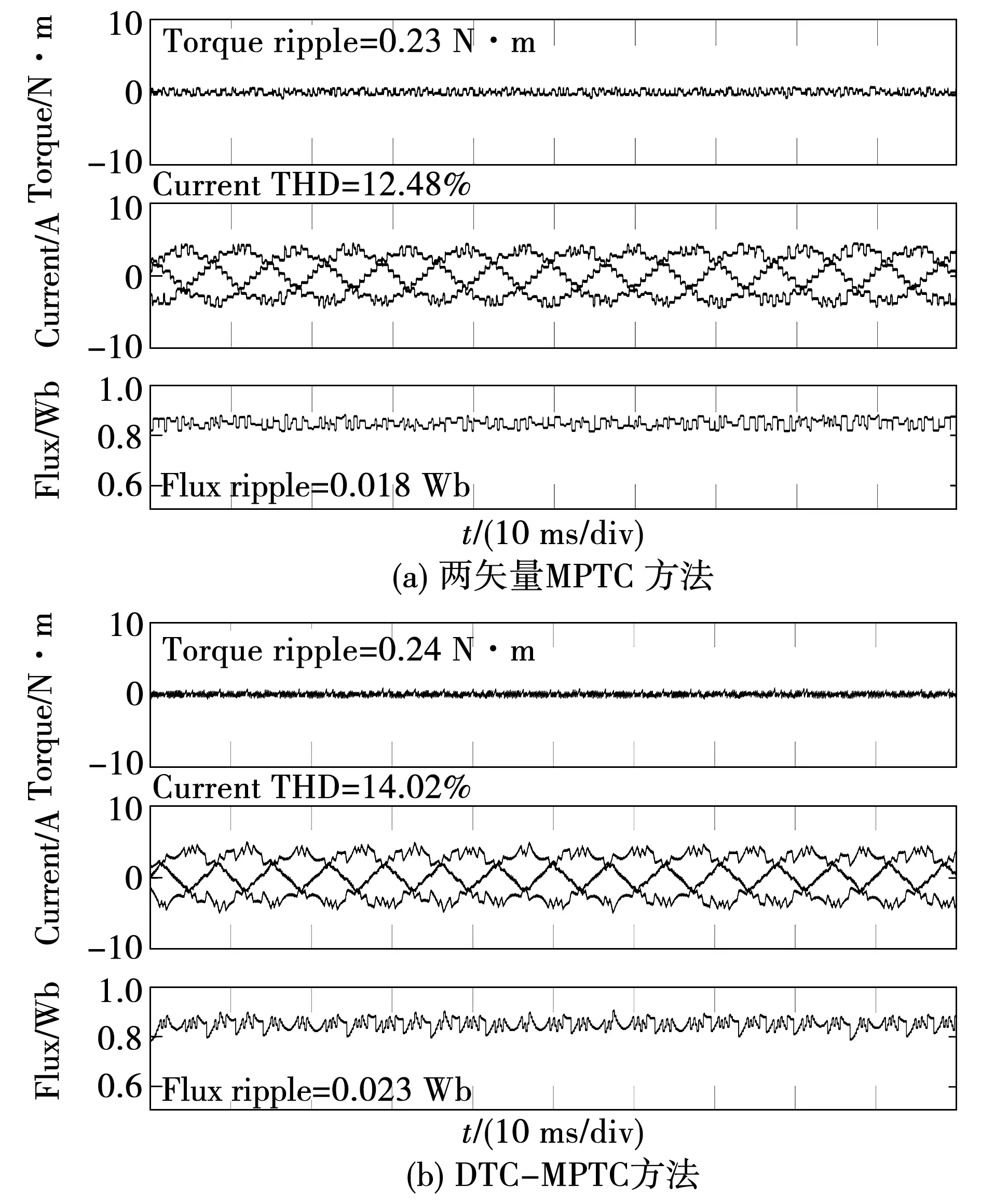
图10 转速1 440 r/min负载0稳态实验波形Fig.10 Experiment waveform of two methods at steady state when speeds are both 1 440 r/min and loads are 0
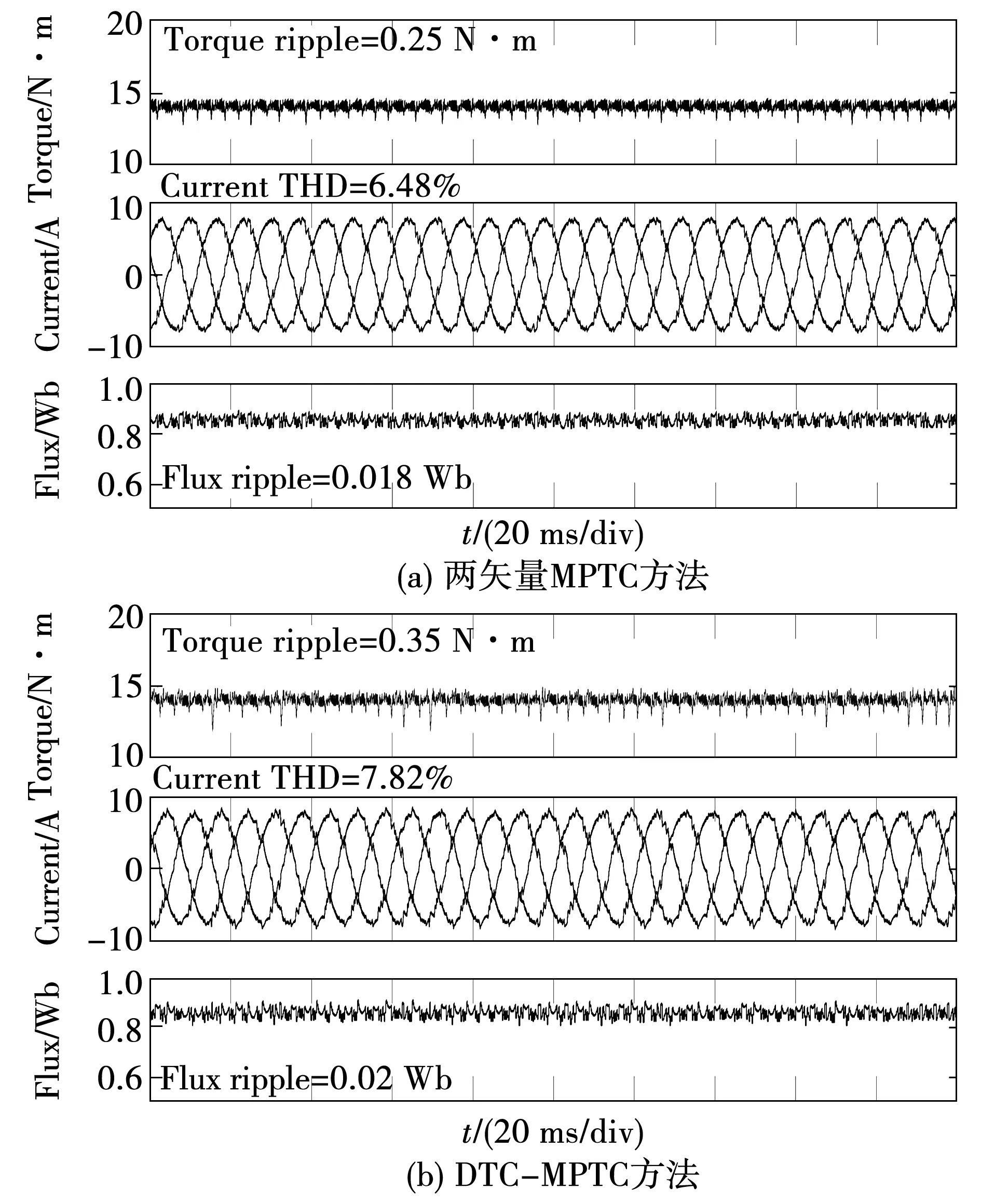
图11 转速1 440 r/min负载14 N·m稳态实验波形Fig.11 Experiment waveform of two methods at steady state when speeds are both 1 440 r/min and loads are 14 N·m
5 结 论
本文在分析传统DTC和两矢量MPTC的基础上,提出了一种基于转矩脉动最小的模型预测控制,通过仿真和实验对比验证了算法的正确性,并得出如下结论:
1)文中所提出的DTC-MPTC方法在减小转矩脉动与动态响应、电流谐波以及磁链波动抑制等稳态和动态性能方面,均能取得与两矢量MPTC相近的控制效果,满足轨道交通车辆运行需求。
2)在高速区域时,DTC-MPTC方法通过转矩滞环判断条件,选择传统DTC电压矢量输出,避免了复杂的代价函数与占空比计算,可以有效减少系统计算量。
猜你喜欢
家教世界(2023年25期)2023-10-09 02:11:56
大电机技术(2022年3期)2022-08-06 07:48:24
中国特种设备安全(2022年3期)2022-07-08 02:21:56
核科学与工程(2021年4期)2022-01-12 06:30:04
煤气与热力(2021年4期)2021-06-09 06:16:54
中华戏曲(2020年1期)2020-02-12 02:28:18
阅读(低年级)(2018年5期)2018-05-14 15:47:44
电测与仪表(2016年10期)2016-04-12 00:26:38
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20