考虑信号灯和能耗的电动车最优路径规划*
2021-06-09 15:18周登辉杜荣华
汽车工程 2021年5期
胡 林,周登辉,黄 晶,杜荣华,张 新
(1.长沙理工大学汽车与机械工程学院,长沙 410114;2.长沙理工大学,工程车辆轻量化与可靠性技术湖南省重点实验室,长沙 410114;3.湖南大学,汽车车身先进设计制造国家重点实验室,长沙 410082)
前言
近年来,电动车已经取得了可观的发展,并在全世界范围内得到有效的推广。到2018年底,我国的纯电动汽车的保有量达到211万辆。但是电动汽车相对于传统燃油车还存在一些问题,例如,电池的容量影响续航里程,电动汽车的充电问题等都在一定程度上制约了其进一步发展。电动汽车相比于传统的燃油车存在的优点是能在制动时回收一部分能量,而在城市路网中存在大量的信号交叉口,因此,对于电动汽车最优路径规划,须考虑信号交叉口及其制动能量回收的影响。
国内外学者对于燃油车的路径规划问题已经开展了很多研究。结果表明,信号交叉口延时对路径规划结果具有重要影响[1-4]。Hu等[5]将信号交叉口造成的时间上的延误等效叠加进最优路径算法中,提出一种考虑信号灯造成延时的改进A*算法;在此基础上加入了对交叉口的速度优化[6]和能耗影响[7],提出一种最优路径规划算法。杨帆等[8]考虑信号交叉口等待时间,提出了信号交叉口处的等待函数,建立了新的标号算法。周熙阳等[9]则考虑了转向类型对信号交叉口等待时间的影响,提出了一种考虑信号交叉口转向类型的CMTA*算法,但该算法没有考虑交叉口协调的情况。Tang等[10]将速度导引策略引入到车辆跟踪模型中,研究多信号交叉口单车道车辆的驾驶行为和油耗,该方法有效地降低燃油消耗和平均停车时间,为信号交叉口生态驾驶策略提供了指导。Wang等[11]考虑信号交叉口对车辆的能源消耗产生的影响,优化车辆在城市道路条件下的速度,提出了一种新的混合动力汽车(HEV)队列速度优化策略,该策略在降低混合动力汽车队列油耗和提高交通平稳性方面具有较好的性能。
续航里程是电动汽车性能的一个关键参数。很多学者针对能耗和制动能量回收进行了研究[12-15]。Yao等[16]分析了不同道路类型电动汽车能耗因素的差异,建立了不同道路类型的电动汽车能耗因子模型,指出在电动汽车能量优化路径规划过程中应考虑基于道路类型的能耗因子。顾青等[17]根据车辆运行时的能耗,考虑能量损失与回收等因素,并考虑了剩余电量和充电站位置,提出了一种基于改进A*算法的电动车能耗最优路径规划方法。Cedric等[18]检测和量化车辆的运动学参数与能耗之间的关系,利用电动汽车实际能耗数据,构建了3种电动汽车能耗计算模型。Strehler等[19]提出了一种具有可转换资源和充电站的约束最短路径求解模型。通过对最优路径中可能出现的几种循环类型进行分类,给出了排除这些循环类型的充分条件,推导出了具有可证明性和严格可行性的近似方案。对于提高电动汽车再生制动能量回收率也得出了相关的结论,有学者提出的控制策略能有效提高能量回收的效率[20-21]。也有部分学者针对电动汽车的能量回收方法和影响因素做了相关分析[22-23]。Ma等[24]考虑充电设施,以最小运输时间为目标,对多配送中心电动汽车的分布路径问题进行优化,基于Bertsimas的鲁棒离散优化理论,建立了具有可调鲁棒性的电动汽车分布路径鲁棒优化模型。张智明等[25]针对公交车的行驶路线中站点固定、须频繁启停和没有考虑实时交通信号灯信息的问题,基于车路协同设计分析公交站点间不同的“加速—匀速—减速”的行驶工况,结合交通信号灯信息和站点距离信息,以单位里程油耗最低为目标,获得纯电动公交车在站点间的一种最优行驶工况。实证研究表明,电动汽车在城市行驶周期行驶时能耗较低,制动时的回收能力较强[26-27]。
综上所述,如何综合考虑信号交叉口和能量回收进行电动车的路径规划是有待解决的问题,因此本文中提出了一种考虑交叉口信号灯及制动能量回收的电动汽车最优路径规划的A*算法,来寻找到达目标点的时间最短和能耗最小的路径方法。
1 考虑信号灯及能耗的最优路径算法
1.1 路网模型构建
城市道路网中,根据道路交叉口节点和路段的分布特点构建路网模型,该模型包括节点位置、路段长度、转向信息等。路网数学模型描述如下:

路网模型中,用G=(N,D,V,E)来表示整个路网,N={n i|i=1,2,3,...}表示路网中所有节点的集合;D={(d ij)|i,j∈N}表示连接各节点之间的弧段长度,V={v ij(t)|i,j∈N}表示弧段的实时速度,E={e ij|i,j∈ }N表示从节点i到节点j的行驶能耗。
1.2 交通灯模型构建
基于车路协同系统,控制系统是基于假设车辆配备有汽车基础设施通信设备,在任意时刻t,未来道路的坡度、距红绿灯距离、红绿灯信号配时及相位、动态速度限制等信息发送到实时控制器。从全球定位系统和车载传感器可以得到车辆的行驶状态(实时速度、加速度等)。节点i到节点j的行程时间包括路段dij的行驶时间和交叉口j处的等待时间,如图1所示。
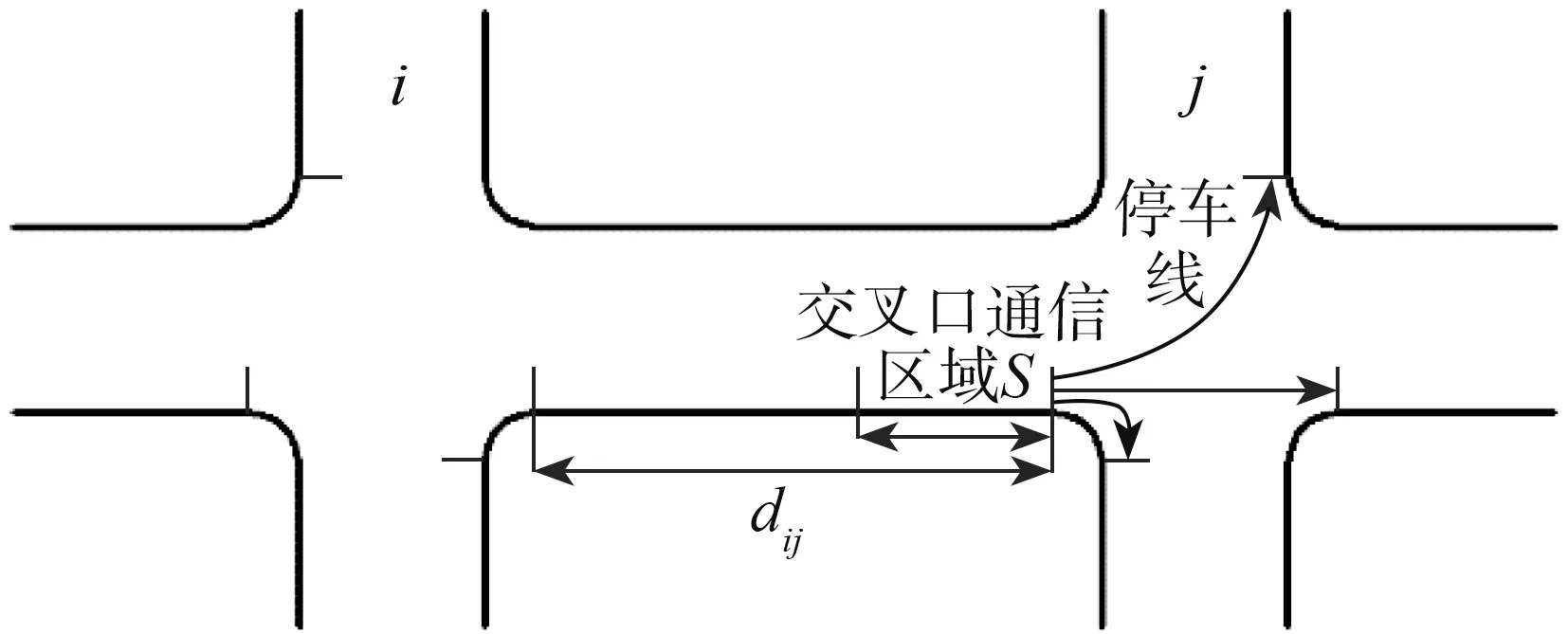
图1 车辆交叉口决策示意图
根据实时获取的信息对车辆的行驶状况进行预判,不考虑道路的坡度影响。车辆到达信号交叉口通信区域S,对车辆做出决策,分为加速、减速、匀速和停车4种通过状态;车辆到达停车线时,同一相位同一时刻只允许一个方向通过,因此选择的路段不同,在交叉口的等待时间和通过交叉口的能耗也不同;通过车路协同系统,可以得到每一路段电动车的实时速度V t。
路网中的交叉口采用单点信号控制,本文中所采用的交通灯模型建立在4相位信号控制交叉口的基础上,将交通灯相位分为红灯和绿灯状态,将黄灯状态时间叠加至红灯相位计算。将汽车通过交叉口的状态分为绿灯匀速通行、红灯前匀加速通行、红灯匀减速通行和红灯等待4个阶段。信号红灯时长用r表示(将黄灯时间纳入红灯状态计算),绿灯时长用g表示,一个信号周期示意图如图2所示。
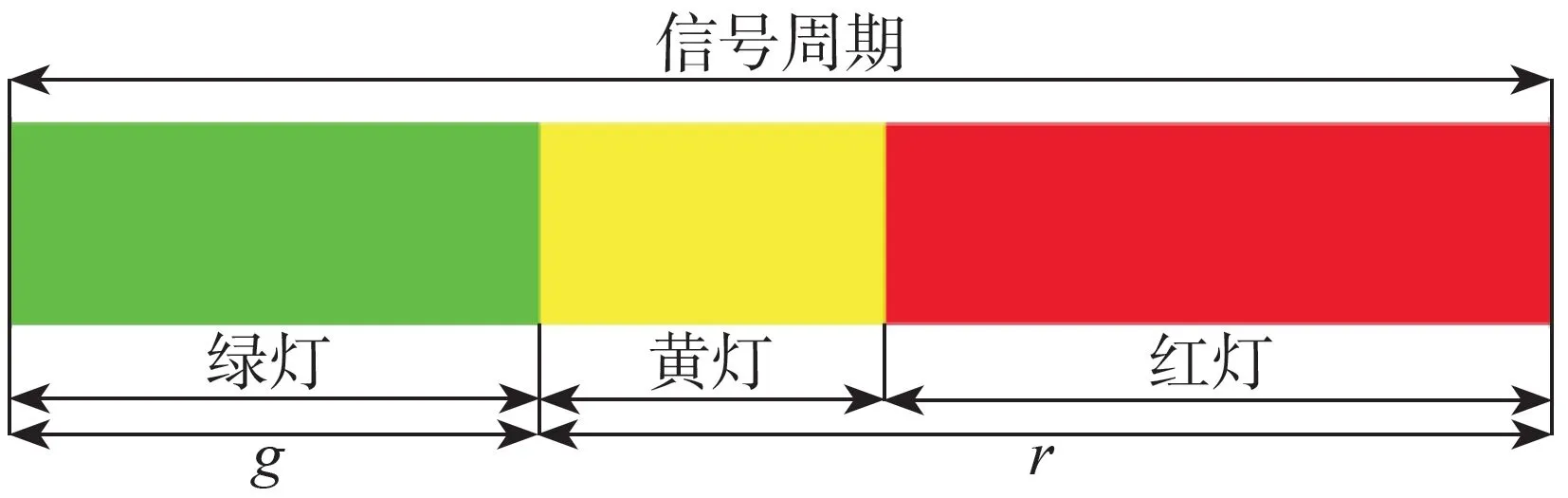
图2 信号周期示意图
当电动汽车将要到达的交叉口时信号灯处于绿灯相位,但是绿灯时长不足以支持车辆以当前速度匀速通过,当车辆选择通过加速到最大限度在绿灯结束之前通过交叉口,此时须考虑前方是否有车和与本车的车头时距,当车头时距大于临界车头时距时,车辆能在红灯之前加速通过。根据信号交叉口处的车辆到达规律[28],本文拟采取对数正态分布模型来描述车头时距的分布。根据对数正态分布函数密度函数为

式中σ2和u为分布参数。根据对数正态分布模型来描述车头时距分布,可得到车流产生相邻两车头时距大于等于临界车头时距的概率:

在考虑信号交叉口处的速度引导策略时,为便于分析起见,将交通流的行驶近似分为4个阶段:绿灯匀速通行、红灯前匀加速通行、红灯匀减速通行和红灯停车等待阶段,如图3所示。v i表示电动车平均速度,Δt表示加速通行阶段时长,ΔT表示减速通行阶段时长。
匀速阶段 对应部分即当车辆进入信号交叉口通信范围内,交通灯相位处于绿灯通信阶段,车辆以当前速度v i通过交叉口,该过程没有剧烈驾驶行为的存在,车辆克服了阻力消耗的能量,且在匀速行驶过程中充分发挥电动机的驱动功率。这个阶段占交通信号周期的概率为pc。
匀加速阶段 对应部分即当车辆进入信号交叉口通信范围内,交通灯相位处在红灯前加速阶段,车辆以加速度a1由速度v i加速到最大速度vmax,然后以速度vmax行驶通过交叉口,再以加速度a2减速到v i继续行驶。车辆克服了阻力和加速阻力所消耗的能量,这个阶段占交通信号周期的概率为pa。
匀减速阶段 对应部分即当车辆进入信号交叉口通信范围内,交通灯相位处在红灯减速阶段,在停车线后以最低限速行驶,进行不完全停车,车辆以加速度a2由速度v i减速到最小速度vmin,然后以速度vmin行驶到交叉口停止线,并在制动减速过程中回收部分制动产生的能量。这个阶段占交通信号周期的概率为pd。
停车等待阶段 对应部分即当车辆进入信号交叉口通信范围内,车辆在交通信号控制周期内没有通过交叉路口,因此在交叉路口停车线以后形成完全停车状态,车速由v i减到0。该阶段的车辆所消耗的能量仅用来维持电动汽车内部辅助行驶装置的运行以及电动机内阻的热消耗,并在制动减速过程中回收部分制动产生的能量。这个阶段占交通信号周期的概率为ps。

图3 信号交叉口行驶分类阶段示意图
根据交通信号灯各相位的时长计算出的4阶段概率为
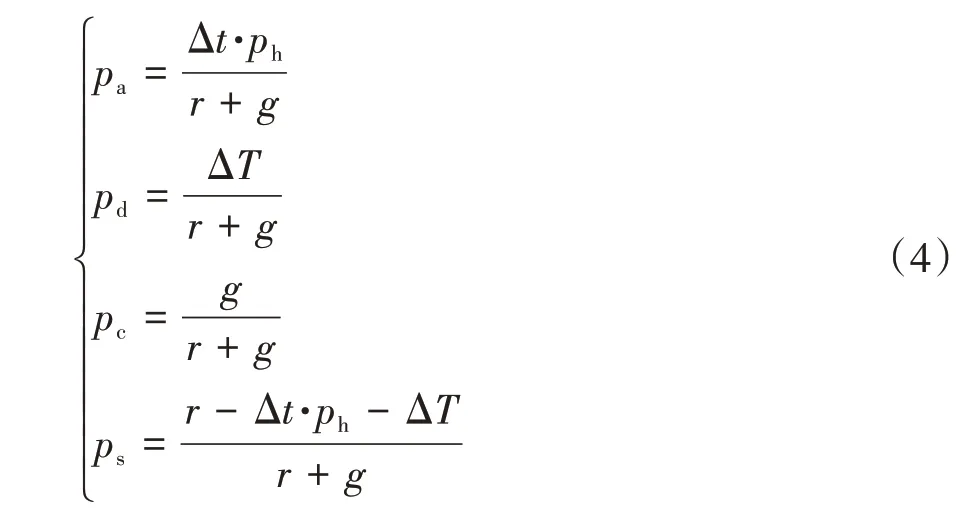
式中ph为车头满足车辆加速通行的概率。
1.3 电动汽车能耗模型构建
电动汽车的能耗受多种因素的影响[22],比如驾驶行为因素、能量回收率因素、风速和阻力等因素。不能用一个简单的模型来描述,国内外学者对电动汽车的能耗模型进行了研究[28-31],但考虑制动能量回收的问题很少。而电动汽车与传统的内燃机汽车最大的不同点为制动能量再生特性,且该特性是与传统内燃机汽车的本质区别,如图4所示。
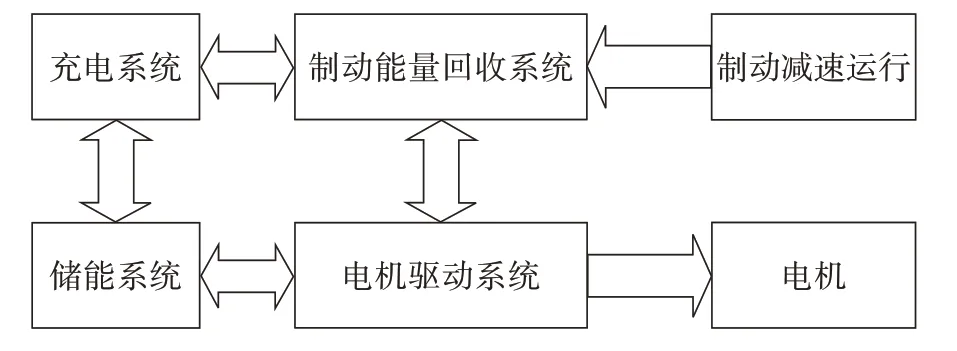
图4 电动汽车能量回收示意图
现有的大多数能耗模型并没有体现出电动汽车的这一典型特性,本文中采用文献[32]中提出的能耗模型,并计及了制动能量回收。进行制动能量回收统计时,假设如下:①计及制动回收能量时车速高于15 km∕h;②城市道路不考虑坡度的影响;③对于驾驶员因素所造成的制动能量回收的影响不做考虑;④在整车需要范围内制动力由驱动电动机提供。基于以上4个假设,车辆在相邻交叉路口行驶时,为便于分析起见,将通过交叉口行驶近似分为4个阶段:匀加速阶段、匀速阶段、匀减速阶段和停车等待阶段。通过计算得到一个能耗估计模型,该模型能够准确计算出在各个阶段的能耗。电动汽车制动时,一部分用于克服道路阻力和空气阻力,一部分则转变为汽车制动器的热能。汽车制动时的能耗可表示为

式中:ηEV为整车效率;N为行驶工况下总制动区段数;u为行驶工况下制动区段序数;v t、v0分别为某制动区段的末速度和初速度,km∕h;Eb为制动能耗,kJ。
对于纯电动汽车,滚动阻力和空气阻力所消耗的能量无法加以回收利用。汽车的制动力主要由机械制动器摩擦制动力和电动机制动力两部分组成。摩擦制动力做功是将汽车的动能转变为热能,散于大气,这种能量转换过程是单向不可逆的,因此无法加以利用,只有电动机制动力所做的功才可以被利用。因此,电动汽车回收的能耗可表示为

式中:κ为电机制动力占总制动力的百分比;ηc为飞轮惯量经电机给蓄电池的充电效率;Ff、Fw、Fj分别为滚动阻力、空气阻力、加速阻力[33];vb为在制动状态下的车速。
车辆通过信号交叉口可分为4个阶段,分别对应不同能耗模型。当电动车进入交叉口通信范围内时,忽略坡度的影响,电动汽车瞬时功率消耗计算公式为

式中:Pt为电动汽车行驶过程中克服阻力(摩擦阻力、空气阻力)所消耗的功率;Pa为电动汽车加速所须消耗的功率,其中电动汽车辅助装置和本身电器所消耗的功率用Pe表示;m为汽车的整备质量,kg;f为滚动阻力系数;δ为旋转质量换算系数;ρ为空气密度;CD为空气阻力系数;A为迎风面积;v为车速。
当电动汽车匀加速通过交叉口时,电动汽车先加速,再匀速,然后减速,电动汽车加速进入交叉口通信区域时刻为0,电动汽车通过交叉口的能耗可表示为
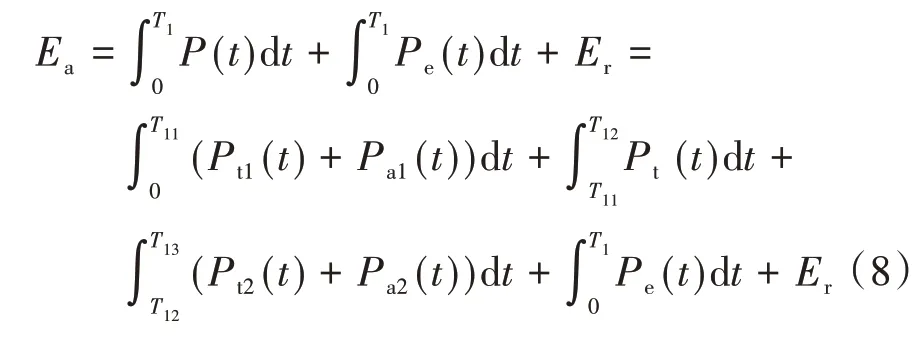
式中:P(t)表示阻力和加速阻力所消耗的功率;0~T1表示匀加速通过信号交叉口的过程。其中0~T11表示匀加速过程;Pt1(t)、Pa1(t)分别表示匀加速过程中克服阻力和加速阻力所消耗的功率;T11~T12表示匀速过程;Pt(t)表示匀速过程中克服阻力消耗的功率;T12~T13表示匀减速过程;Pt2(t)、Pa2(t)分别表示匀减速过程中克服阻力和减速阻力所消耗的功率;Pe表示辅助装置及本身电器所消耗的能量。
当电动汽车匀减速通过交叉口时,先减速,再匀速,假设电动汽车进入交叉口通信区域时刻为0,其通过交叉口的能耗可表示为

式中:0~T2表示匀减速通过信号交叉口过程;0~T21表示匀减速过程;T21~T22表示匀速过程;T22~T23表示匀加速过程。
当电动汽车匀速通过交叉口时,假设电动汽车进入交叉口通信区域时刻为0,电动汽车通过交叉口的能耗可表示为

式中:0~Tu表示匀速过程。
当电动汽车经过交叉口停车等待时,假设电动汽车进入交叉口通信区域时刻为0,电动汽车停车等待阶段时间短,辅助装置及本身电器所消耗的能量可以忽略不计。所以电动汽车通过交叉口的能耗可表示为

式中:0~T3表示电动汽车经过交叉口停车等待的整个过程;0~T31表示匀减速到停车过程;T31~T32表示从0开始匀加速过程。
以上分别计算出电动汽车在通过信号交叉口时匀加速、匀速阶段、匀减速和停车等待阶段的能耗。通过式(4)计算出来的信号交叉口的通行概率分别对应不同能耗模型,计算出电动汽车通过交叉口的能耗为

1.4 考虑信号灯及能耗的最优路径算法
本文中不考虑电动汽车中途充电的情况,也即起点到终点的路径长度能耗在车辆的续航里程范围内。在城市路网中,车辆通过信号口工况分为4阶段包括加速、减速、匀速和停车等待,在实际行驶过程中,遇交叉口时,实际停车等待的概率较大,此时电动车制动时产生的能量能回收一部分,所以在车辆通过交叉口,考虑能量的回收将实际反映出电动车真实能耗。提出一种考虑信号交叉口及能量回收的节能路径算法。在交通灯的影响下,根据电动车的能耗模型以及交叉口交通灯相位的4种通过模式,结合A*算法,提出了考虑交通灯和能量回收的电动车路径规划算法,估价函数描述如下:

式中:f(j)为当前节点估价函数;g(j)为起点到当前节点的实际费用,由历史迭代计算可以得出;h(j)为当前节点到目标节点的预估代价;g(i)为初始节点到当前节点的实际费用;E(j)为通过交叉口的能耗,如式(12)所述;D(n)为当前节点到目标节点的曼哈顿距离。
A*算法通过open和close两个表来记录节点和区分节点,通过表格节点之间的迭代计算,最后求得结果。考虑交通灯及能耗的最优路径算法步骤如下。
步骤1:将路网中的所有节点作为节点集合,生成空的open和close表,选择一个节点作为路径的初始节点,放入open表中,并以路径初始起点作为当前节点。
步骤2:从节点集合中选取当前节点邻近节点作为路径的下一个扩展节点。
步骤3:计算步骤2中所选的所有待扩展节点的估价函数,即f(j),所述待扩展节点的估价函数的值由当前节点的实际费用g(j)和当前节点到目标节点预估代价h(j)两部分组成,其中g(j)由两交叉口间非通信距离能耗值和通过交叉口的能耗E(j)两部分组成。
步骤4:选取步骤3中所有待扩展节点的估价函数值最小的路径节点连接当前节点,判断该节点f(j)是否为最小,如果是,将所选取的待扩展节点作为当前节点加入open表中,否则加入到close表,若当前节点为目标节点,则路径规划结束;否则,返回步骤2。
通过A*算法步骤,得到的计算流程图如图5所示。
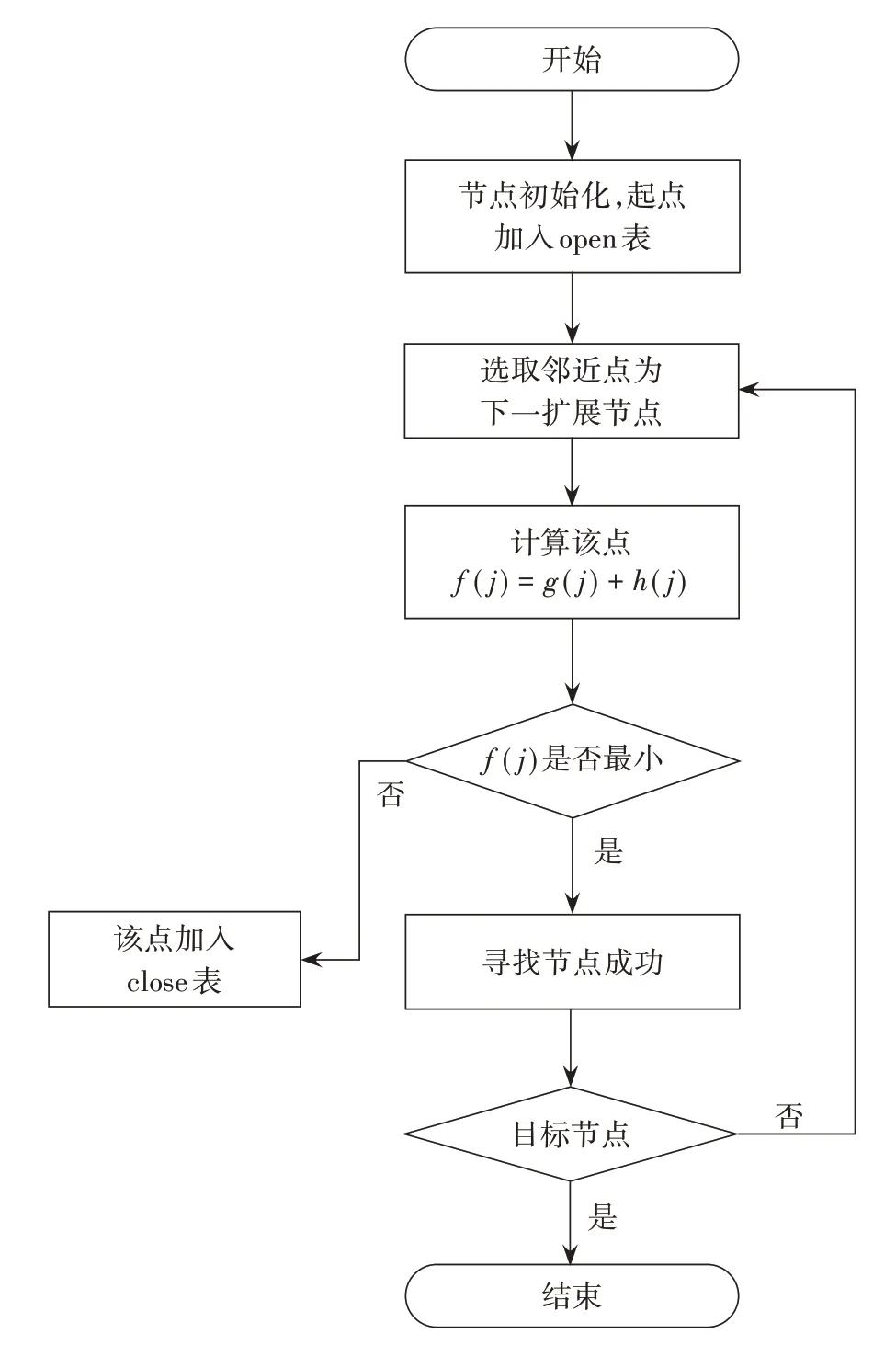
图5 A*算法流程图
2 算法验证
设计一个简单的路网来阐述本文中提出的考虑信号交叉口及能量回收的最优路径规划算法的实现过程。图6为路网简单示意图。开始节点为1,终节点为25,其中包括25个信号交叉口和40条路段,T形路口3个。
算例条件设置如下。
(1)路网中的各路段均为双向通行,长度如表1所示。路网中的最高限速值设为60 km∕h,最低限速为15 km∕h,平均速度为35 km∕h。车辆的加速度设为1.5 m∕s2,减速度设为2.5 m∕s2。
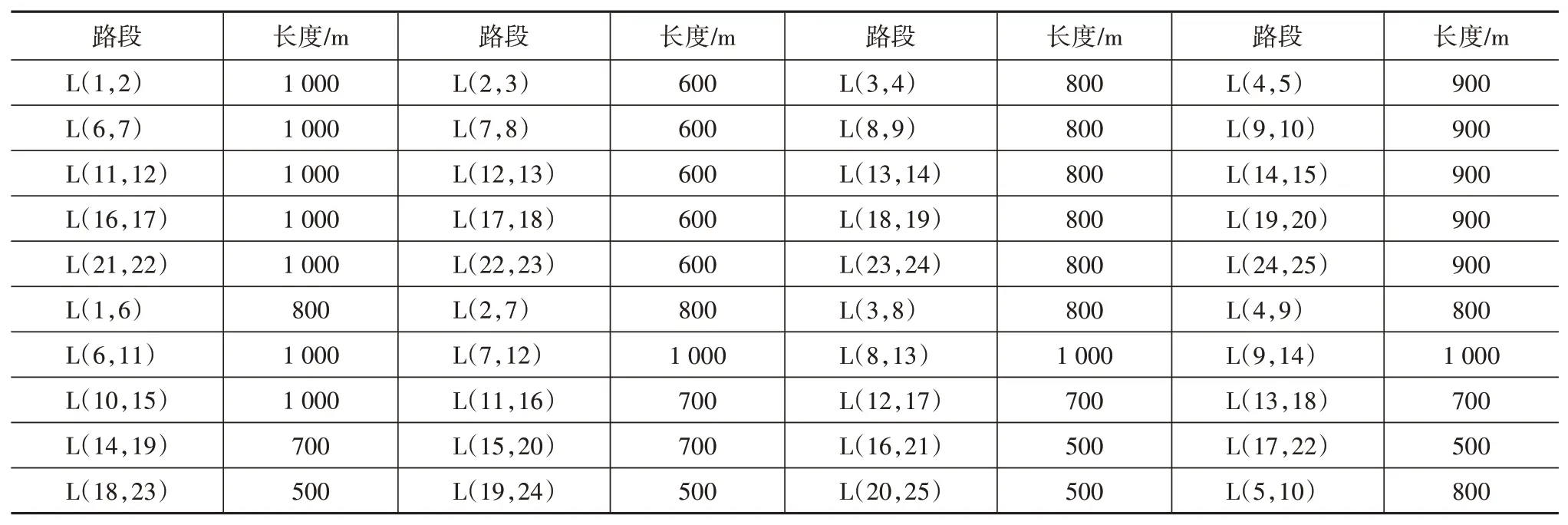
表1 路网各路段长度
(2)对算例中所有信号交叉口相位相序作统一规定:十字交叉口为4相位,相位1为南北向直行,相位2为南北向入口左转,相位3为东西向直行,相位4为东西向入口左转。节点15、20两个T形路口为2相位,相位1为南北向直行和南进口左转,相位2为西进口左转。节点6为2相位,其中相位1为南北直行和南进口右转,相位2为东进口右转。
(3)基于车路协同系统,在通信区域S任意时刻t,电动车能够获取信号灯和交通实时信息,即距红绿灯距离、红绿灯信号配时及相位、动态速度限制等。通信距离S设为200 m,各相位配时信息如表2所示。
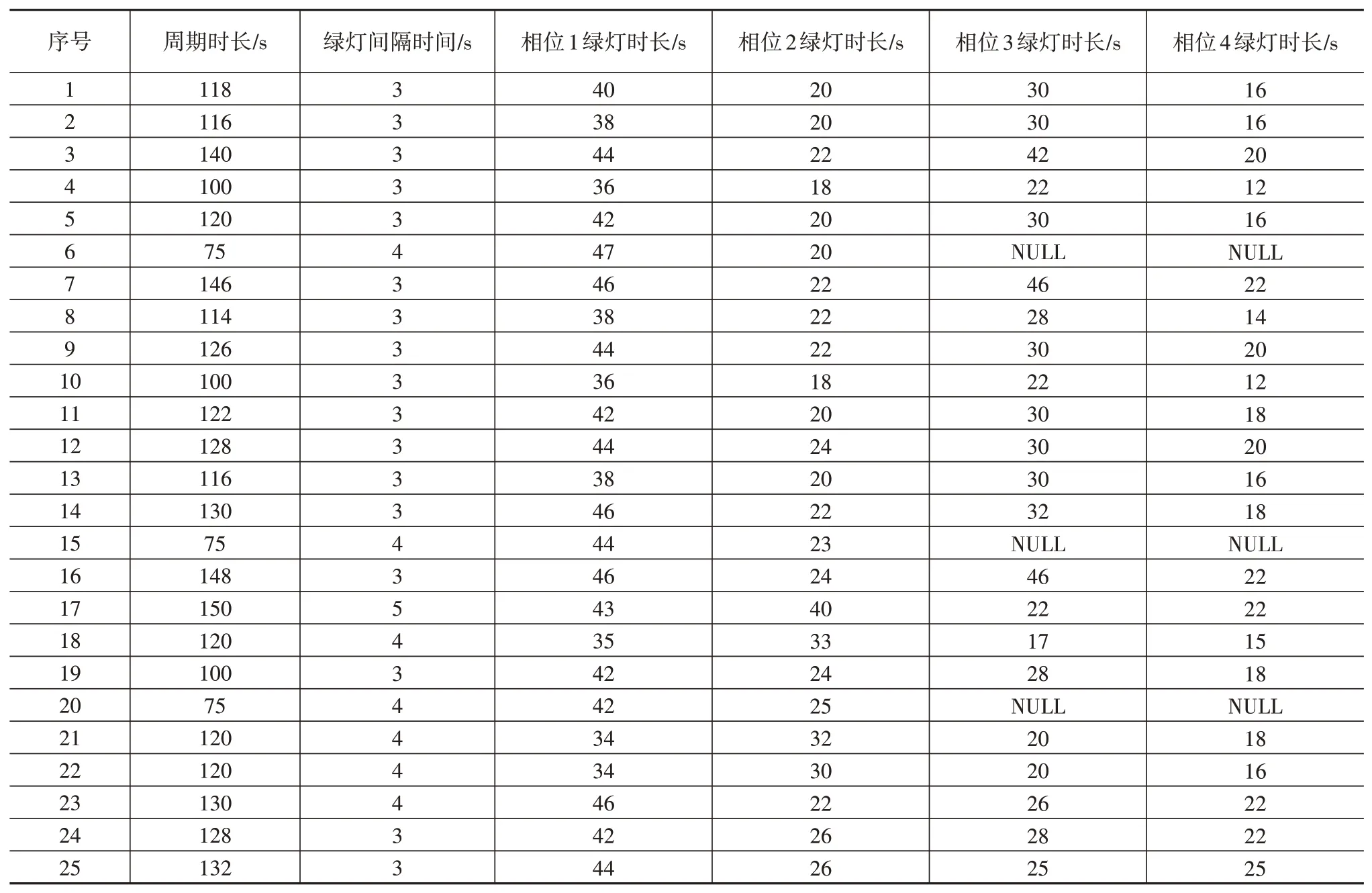
表2 交叉口信号配时表
(4)算例验证中的整车参数定义及其数值如表3所示。

表3 算法验证整车主要参数
根据本文中提出的算法,首先由各信号灯的配时信息,根据式(4)计算出各阶段的概率;根据路段通行速度、电动车的加速度等已知信息分别计算出加速通行阶段、匀减速通行阶段、匀速通行阶段和减速至停车等待阶段的能耗,结合四者在交叉口的通行概率,所得能耗路径为①-⑥-⑦-⑧-⑨-⑩-○15-○20-○25的能耗最优,路径包含了4个十字路口,3个T形路口,如图7虚线路径所示,路段总长6.3 km。

图7 能耗最优路径示意图
根据交通灯的相位配时信息,计算出由路网信息和能耗模型得到电动车通过交叉口的能耗,如表4所示。最终算得路段的能耗约为4 744 kJ。

表4 各交叉口节点能耗
将改进的算法和传统的A*算法性能进行对比,如图8所示。改进后的算法能耗要优于原算法。虽然行驶时间增长了6%,但能量消耗减少了约13%。改进后的算法道路费用总成本降低,其性能优于传统的A*算法。

图8 A*算法前后对比
选取10组具有一定距离且不同起点的路段,进行算例验证,得到如图9所示的验证结果。分别用两种算法计算出10组的能耗最优路径。考虑信号灯及能耗的改进A*算法,所得的路径能耗明显优于A*算法。本文中所提出的算法综合考虑了信号灯及能耗,能准确根据两者得出一个综合费用最低的结果。
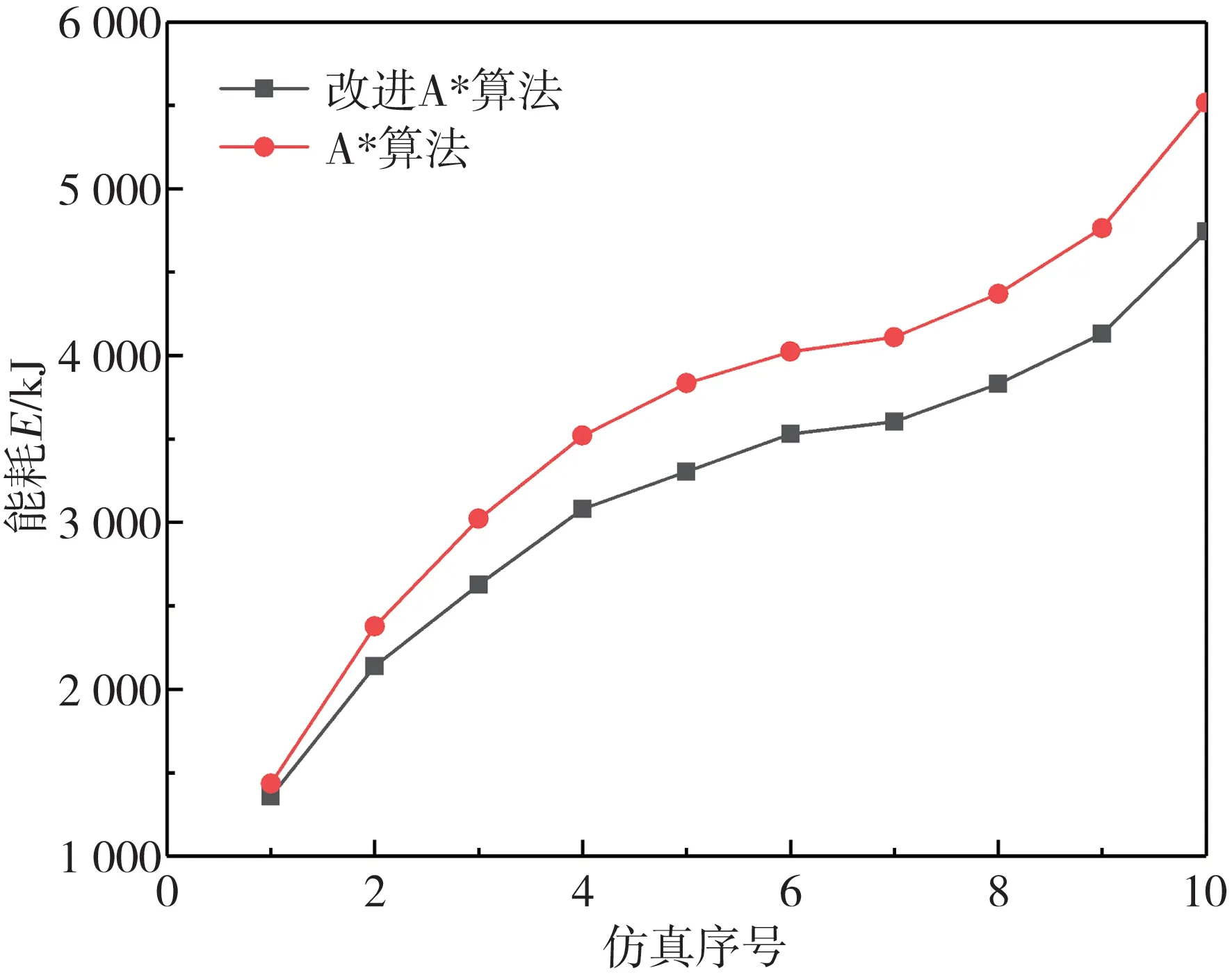
图9 算例验证结果对比
3 结论
提出了城市路网中考虑交通灯和能量回收的最优路径规划算法。将交通灯相位分为红灯和绿灯状态,黄灯叠加至红灯相位计算。将电动汽车通过交叉口的状态分为绿灯匀速通行、红灯前匀加速、红灯匀减速和红灯停车等待4个阶段。在此基础上结合A*算法,提出了基于电动车能耗最优的改进A*算法。算例验证表明,相比传统的A*算法,该算法所计算出的总费用最低,其在传统算法的基础上考虑了信号交叉口和能量回收的影响,车辆通过信号交叉口时须根据交通灯相位进行加、减速操作,会对电动车的能耗及续航里程产生影响。该算法通过分别计算路段通行能耗和交叉口通行能耗,有效权衡路径长度和交叉口密度的影响,可有效延长电动汽车的续航里程。该算法适用于交通灯密集的城市道路网,且路段交通灯越密集,该算法的优越性越明显。同时,算法也存在一定的局限性。在不同时间段内信号交叉口的到达车流具有明显的差异。在交通流高峰时间段内,车流密集,车头时距小,车辆加速通过交叉口的概率也小。
后续研究中,须进一步考虑以下几个方面:(1)更加精确的城市行驶工况;(2)考虑不同时间段的交通流分布,进一步分析交通流影响下的车头时距,提高算法的精确性;(3)进一步优化电动车的能耗预估模型。
猜你喜欢
机械工业标准化与质量(2022年8期)2022-10-09
建材发展导向(2022年14期)2022-08-19
物流科技(2022年2期)2022-05-07
汽车实用技术(2022年7期)2022-04-20
建材发展导向(2021年19期)2021-12-06
建材发展导向(2021年23期)2021-03-08
知识就是力量(2019年7期)2019-07-01
华人时刊(2018年15期)2018-11-10
环球时报(2018-10-15)2018-10-15
儿童故事画报·发现号趣味百科(2017年9期)2018-03-13