
GPS-L1/ BDS-B1非重叠频率紧组合相对定位
2021-06-07 02:19赵文浩刘根友王生亮
大地测量与地球动力学 2021年6期
赵文浩 刘根友 王生亮 高 铭
1 中国科学院精密测量科学与技术创新研究院大地测量与地球动力学国家重点实验室,武汉市徐东大街340号,430077 2 中国科学院大学地球与行星科学学院,北京市玉泉路19号甲,100049
随着全球四大导航卫星系统的逐步建成与完善,多系统间的兼容互操作联合定位成为今后GNSS发展的必然趋势[1]。由于不同卫星导航系统间存在系统间偏差(inter-system bias,ISB)和频率不一致等问题,通常使用的多系统相对定位模型为每个系统独立选择参考星,形成系统内双差,这种组合方式一般称为松组合。而紧组合是指不同系统间只选择一颗参考星,既形成了系统内双差,又形成了系统间双差[2-3]。在一些复杂观测环境(如树下、城市峡谷等),由于卫星数量严重缺失,此时使用单系统解算模式可能出现无法解算的情况,而使用双系统联合定位模式仍可以解算。另外,在卫星数量十分稀少的情况下,松组合模型很难固定模糊度,而紧组合模型能有效增加观测方程数量,提高模糊度固定率及定位精度。
目前,国内外学者对紧组合的研究主要集中在GPS/Galileo组合的重叠频率(L1与E1)上,而对BDS与其他系统间的紧组合及不同系统间非重叠频率紧组合的研究较少[4-11]。本文对短基线下GPS-L1(1 575.42 MHz)/BDS-B1(1 561.098 MHz)非重叠频率紧组合相对定位算法进行研究,详细推导了短基线下GPS-L1/BDS-B1非重叠频率紧组合相对定位数学模型,并对事先标定DISB的方法进行详细介绍;同时,分析GPS-L1/BDS-B1非重叠频率DISB的稳定性,并基于GPS-L1/BDS-B1单历元相对定位实验验证紧组合相较于松组合的优越性。
1 数学模型
由于GPS和BDS使用的坐标系统及时间系统不一致,在进行GPS/BDS精密相对定位时必须进行考虑。在坐标系统方面,尽管GPS和BDS分别采用WGS-84和CGCS2000坐标系,但在进行相对定位时,两者的区别可以忽略不计[12-13];在时间系统方面,GPS时与BDS时相差14 s,因此将BDS时加上14 s,使两者的时间系统统一[14]。
1.1 非差观测方程
假设一台GNSS接收机同时接收GPS/BDS伪距与载波相位观测值,则卫星s与接收机i之间的非差伪距与载波相位观测方程为:
(1)
(2)

1.2 单差观测方程
在测站i、j之间作差可以消除与卫星有关的误差。在短基线情况下,可以忽略电离层和对流层延迟,用单差算子Δ表示观测值之差,则i、j站间的单差观测方程可表示为:
(3)
(4)
1.3 松组合相对定位模型
GPS/BDS松组合联合相对定位解算时,假设GPS/BDS系统分别选择G1、B1作为参考星,系统内双差可以进一步消除与接收机相关的误差,用双差算子Δ∇表示观测值之间的双差,则GPS/BDS松组合双差观测方程可表示为:

(5)

(6)
(7)
(8)
1.4 紧组合相对定位模型
在松组合模型中,每个系统选择各自的参考星进行系统内双差;而在紧组合模型中,多个系统选择一个共同的参考星,除系统内双差外,还需进行系统间双差。假设GPS/BDS紧组合定位时,选择G1作为双系统的共同参考星,则双差方程可表示为:

(9)


(10)
由于GPS-L1和BDS-B1的频率不一致,进行系统间双差时接收机端初始相位无法消除,单差硬件延迟无法形成双差硬件延迟,单差模糊度也无法形成双差模糊度,此时进行参数重组,令
(11)
λB1DISB
(12)

(13)

由于紧组合模型多估计了一个DISB参数,导致法方程秩亏,并且单频时秩亏数为1,此时要对参数进行重组,令


(14)

(15)

(16)


(17)
虽然紧组合模型增加了观测方程数量,但同时也增加了待估参数,方程的冗余度不变,所以理论上模型强度不变,并不会增加定位的精度和模糊度固定的成功率[6-8]。
1.5 事先标定DISB
(18)


(19)
由式(15)可知,采用紧组合相对定位模型估计出的DISB参数实际上吸收了参考星之间的双差模糊度,即使采用单历元模式进行解算,仍需考虑参考星的变换。在对最开始参考星不变的几个历元进行DISB标定后,如果参考星发生变化,可以采用式(20)对标定的DISB进行转换:


(20)

2 实验分析
2.1 实验数据与处理策略
本文选取科廷大学短基线实验数据(CUTB0~CUTC0),其中2台接收机类型相同,均选用Trimble NetR9接收机,天线类型为TRM 59800.00 SCIS,数据采集时间为2018-01-08,采样间隔为30 s。数据处理策略为GPS-L1/BDS-B1单历元短基线相对定位,利用高度角定权方法,选取高度角最大的卫星作为参考星,固定模糊度采用最小二乘模糊度降相关平差法(LAMBDA),并根据ratio值是否达到阈值3或5对模糊度是否固定成功进行判断[10]。
分别采用松组合与事先标定DISB的紧组合模型对实验数据进行处理,并对处理结果进行比较分析。首先使用紧组合相对定位模型对DISB的稳定性进行分析,并对事先标定DISB的方法进行详细介绍,分别对截止高度角为10°、20°、30°、40°时2种数据处理模式的模糊度固定率及误差分布进行统计与分析。
2.2 DISB稳定性分析
采用式(16)和式(17)的紧组合相对定位模型对实验数据进行解算,得到伪距DISB及相位DISB的估值时间序列,结果如图1(a)和1(b)所示。从图1(a)可以看出,解算得到的伪距DISB值十分稳定,平均值为-0.54 m,标准差为0.28 m,由式(15)可知,采用紧组合相对定位模型估计出的DISB参数实际上吸收了参考星之间的双差模糊度。从图1(b)可以看出,每次参考星变换都会引起DISB估值的变化,而在参考星稳定不变的时间域内,所估得的DISB值也十分稳定。由于参考星之间的双差模糊度参数与相位DISB参数系数相同,无法将实际的相位DISB单独分离出来,故在分析相位DISB稳定性时,通常只分析所估计出的DISB参数的小数部分,整数部分被参考星间双差模糊度吸收。图1(c)为采用式(16)和式(17)估计出的DISB参数的小数部分,从图中可以看出,其在时间域内十分稳定,平均值为0.44周,标准差为0.02周。由此可知,可以采用事先标定DISB的紧组合模型对实验数据进行解算。
图1 伪距与相位DISB时间序列Fig.1 DISB time series of pseudo range and phase
2.3 模糊度固定率分析
对截止高度角为10°、20°、30°、40°时GPS/BDS的可观测卫星数量进行统计,结果见图2。从图中可以看出,当截止高度角为10°和20°时,GPS/BDS每个历元的卫星数量都在4颗以上;当截止高度角为30°时,BDS系统卫星数量都还在4颗以上,而GPS系统则出现少量卫星数为3颗的历元,此时使用GPS单系统解算模式将无法解算;当卫星高度角为40°时,BDS系统的卫星数量仍然保持在4颗以上,GPS系统则出现了大量卫星数量在4颗以下的历元,此时使用GPS单系统解算模式将出现大量无法解算的历元,使用双系统联合定位模式仍可以解算。
图2 不同截止高度角卫星数量Fig.2 Figure of the number of satellites with different cut-off altitudes
图3为不同截止高度角下GPS-L1/BDS-B1松组合与事先标定紧组合的模糊度固定ratio值,从图中可以看出,当截止高度角为10°时,紧组合与松组合的模糊度固定ratio值整体相差不大,这是因为卫星数量充足,紧组合相对松组合对ratio值的提高还不是十分明显,此时松组合的平均ratio值为10.0,紧组合的平均ratio值为12.5。当截止高度角为20°和30°时,紧组合的ratio值已经明显高于松组合,这是因为随着卫星数量的减少,紧组合模型增加的多余观测量产生的效果越来越明显。高度角为20°时松组合的平均ratio值为13.7,紧组合的平均ratio值为25.9;高度角为30°时松组合的平均ratio值为10.5,紧组合的平均ratio值为29.1。当高度角为40°时,紧组合的一部分历元远远高于松组合,主要因为此时卫星数量十分稀少,GPS系统大部分历元卫星数在4颗以下,使用松组合很难固定模糊度,而紧组合在这种场景下具有巨大优势,此时松组合的平均ratio值为5.1,紧组合的平均ratio值为19.1。

图3 不同截止高度角ratio值Fig.3 Ratio values of different cut-off height angles
表1(单位%)为以ratio值为3和5作为成功固定模糊度的阈值时,不同截止高度角下松组合与紧组合的模糊度固定成功率。从表中可以看出,当以ratio=3作为模糊度成功固定的阈值时,随着卫星截止高度角的增大,紧组合相对松组合的模糊度固定成功率有了明显提高。其中,当卫星截止高度角为10°和20°时,紧组合相对松组合的模糊度固定成功率没有明显提高;而当截止高度角为30°和40°时,模糊度固定成功率分别提高了14.72%和36.04%,提升较为明显。当选择ratio=5作为检验模糊度成功固定的阈值时,截止卫星高度角在10°、20°、30°和40°时,GPS系统平均卫星数量分别为9颗、7颗、5颗和4颗,BDS系统平均卫星数量分别为11颗、9颗、8颗和6颗,紧组合相对松组合的模糊度固定成功率分别提高10.04%、17.26%、31.74%和42.85%。因此,随着检验模糊度成功固定标准的严格,紧组合相对松组合提升模糊度固定成功率的效果更加明显。
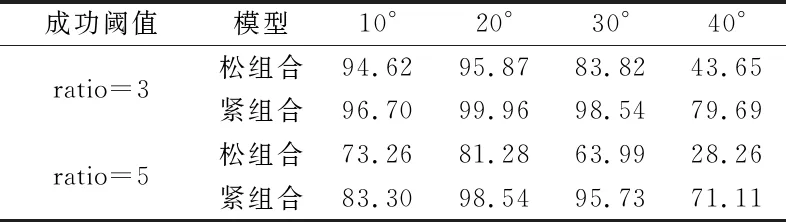
表1 不同截止高度角模糊度固定成功率
图4为不同截止高度角下GPS/BDS单频松组合与紧组合的模糊度精度衰减因子(ADOP),由图可知,相比于松组合模型,使用紧组合模型后ADOP值有了显著降低,并且随着截止高度角的增大,ADOP值的降低效果越明显。不同截止高度角下ADOP的平均值统计见表2。
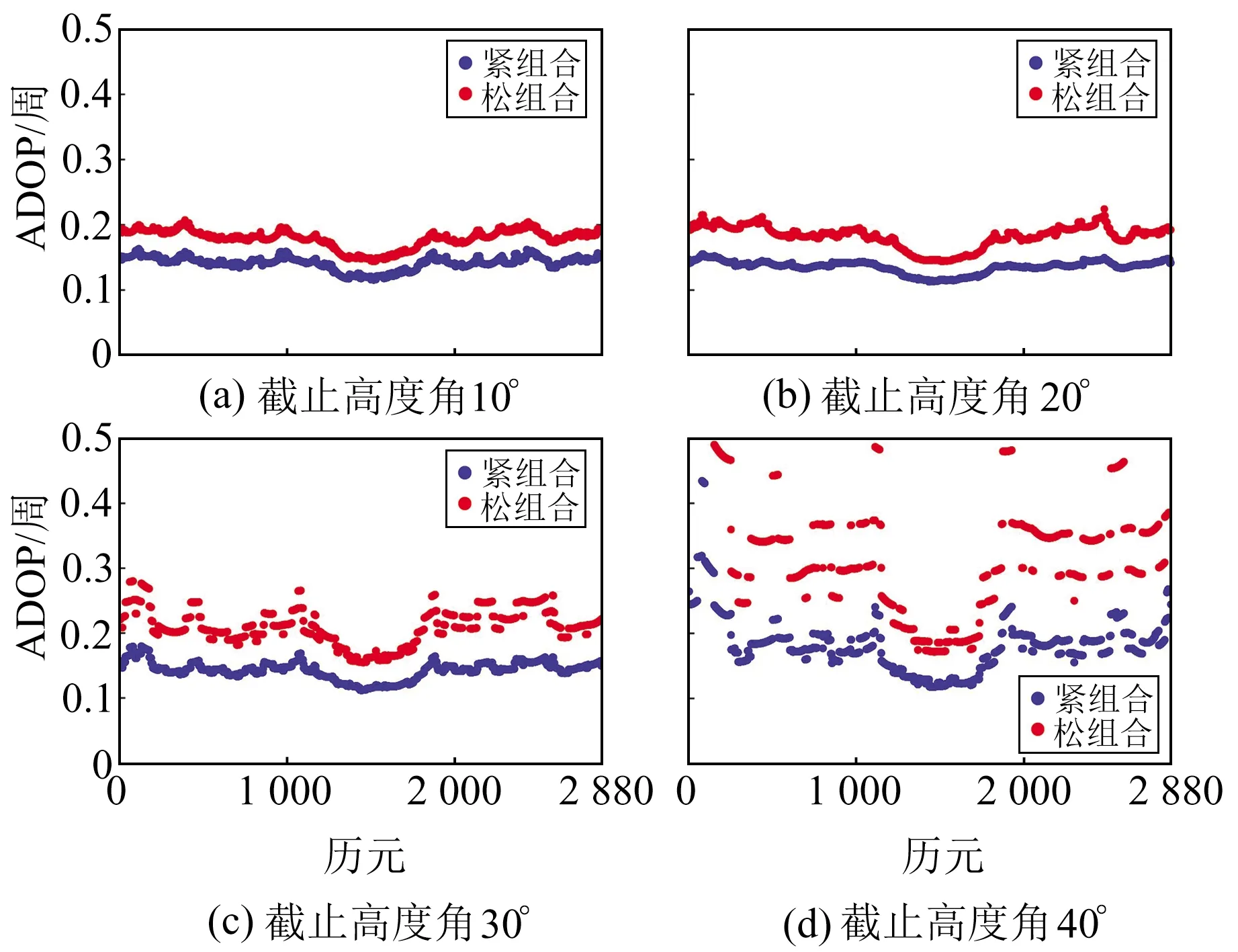
图4 不同截止高度角的ADOPFig.4 ADOP with different cut-off height angles

模型10°20°30°40°松组合0.1790.1820.2100.334紧组合0.1420.1360.1430.182降低20.8%25.6%31.9%45.3%
2.4 定位精度分析
表3(单位%)为松组合与紧组合在E、N、U三方向定位误差小于1 cm的历元占全部历元的百分比,从表中可以看出,当截止高度角为10°和20°时,松组合与紧组合的定位精度差别不大,绝大多数历元的定位误差都在1 cm之内;当截止高度角为30°时,紧组合1 cm以内的误差相对松组合在E、N方向所占比例提升约4%,U方向提升约14%;当截止高度角为40°时,紧组合的定位效果明显优于松组合,1 cm以内误差在E、N方向所占比例提升23%以上,U方向提升14%以上。

表3 定位误差小于1 cm的历元所占全部历元百分比分布
3 结 语
本文详细推导了短基线下GPS-L1/BDS-B1非重叠频率紧组合相对定位的模型与算法,论述了非重叠频率紧组合与重叠频率紧组合的处理区别,并对GPS-L1/BDS-B1非重叠频率的DISB稳定性进行分析。在DISB稳定的情况下可事先对其进行标定,将标定结果代入后续计算可以增加冗余观测量,有效提高模糊度解算的效率。利用短基线数据进行实验验证后发现,GPS-L1/BDS-B1间伪距与相位DISB均具有很好的时域稳定性,在使用单频单历元处理模式下,随着截止高度角的增加,使用事先标定DISB的紧组合相对定位模型比使用传统松组合模型的模糊度固定率提高3%~42%,平均ratio值提升25%~275%。在定位精度方面,当截止高度角为10°和20°时,卫星数量充足,紧组合与松组合的定位效果无太大区别;当截止高度角为30°和40°时,卫星数量稀少,紧组合的定位效果优于松组合。
致谢:感谢澳大利亚科廷大学(Curtin University)提供GNSS实验数据。
猜你喜欢
北京大学学报(自然科学版)(2022年4期)2022-08-18
测绘学报(2022年5期)2022-05-31
大地测量与地球动力学(2022年1期)2022-01-11
中国惯性技术学报(2020年2期)2020-07-24
石油地球物理勘探(2017年4期)2017-12-18
化学分析计量(2014年6期)2014-04-04
今日中学生(初一版)(2013年4期)2013-06-07
中学生数理化·七年级数学人教版(2008年11期)2008-12-24
