
基于HOG 特征的成型轮毂识别方法
2021-06-05 07:04顾寄南黎良臣
机械设计与制造 2021年5期
韩 璇,顾寄南,黎良臣
(江苏大学机械工程学院,江苏 镇江 212013)
1 引言
在现代自动化生产过程中,机器视觉系统广泛地用于各种工况监视、成品检验和质量控制等领域[1]。在汽车制造行业,轮毂的视觉定位、识别与测量技术也应用广泛[2]。目前,人工识别的效率已经无法满足快速的自动化生产需求,需要采用基于机器视觉的方法实现对轮毂的分类。
基于机器视觉的轮毂分类方法的研究国内也进行了很多,文献[3]提取出轮毂的形状特征并采用模板匹配的方法对轮毂进行分类;文献[4]研究了轮毂基于灰度信息的模板匹配分类方法;文献[5]对轮毂图像进行旋转模板匹配,完成对轮毂的识别。但是,模板匹配方法受光照的稳定性,均匀性以及图像上轮毂与背景对比度的影响较大,不稳定的光照条件会降低轮毂识别分类的精度。此外,模板匹配法过度地依赖模板图像的质量。
为了降低上述因素对轮毂图像识别分类精度的影响,采用一种基于梯度方向直方图特征(HOG)和支持向量机(SVM)的轮毂图像分类方法。首先对采集的样本轮毂图像进行预处理,接着提取出正负样本的HOG 特征,利用SVM 对样本数据进行训练得到相应的分类模型并输入测试数据完成轮毂的识别实验。其算法大致流程图,如图1 所示。
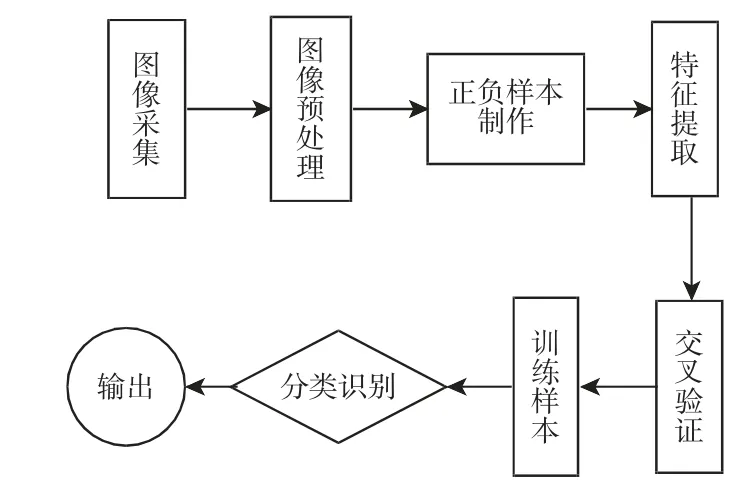
图1 算法流程图Fig.1 Algorithm Flowchart
2 轮毂图像的采集和预处理
样本图片的来源是成型轮毂分拣系统中的原始图像,轮毂的图片由欧姆龙CCD 工业相机拍摄所得,光源为LED 环形光源,照明方式为前向照明,为了验证提出的方法是否可行,调节光源控制器使光源呈现弱光、正常光和强光三种状态,大量地拍摄不同光源状态下的轮毂图片,并将其转化为灰度图像,从中选择合适的图片用于正负样本的制作。
3 图像HOG 特征的提取
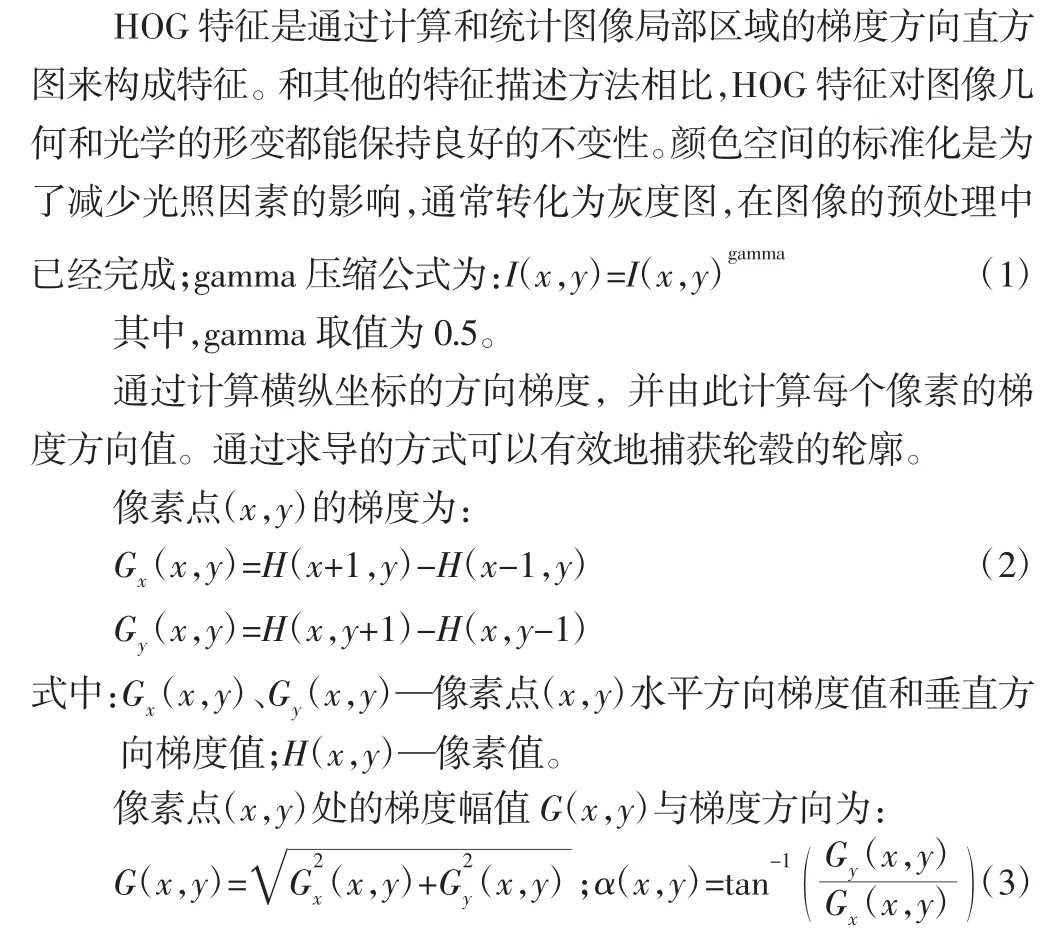
HOG 特征采集的一个“细胞”的像素大小为16×16 的矩形区域,将像素的梯度方向将360°均匀划分成9 个直方图通道,“细胞”内的每个像素对其梯度方向所在的直方图通道进行加权投票[6],权值采用梯度幅值的高斯加权计算方法得来。
对梯度强度进行归一化能够进一步对光照和边缘进行压缩,归一化处理能够有效地克服图像局部光照变化与背景对比度变化的影响[6]。归一化块由四个“细胞”组成,块与块之间互相重叠。采用归一化的方法可以有效减弱图像局部变化的影响。采用的归一化函数为L2-norm,其计算式为:

训练样本的像素为64×64,归一化块的个数为9,每个“细胞”代表着维数为9 的特征向量,则一个样本提取到的HOG 特征向量维数为9×4×9=324 个,该向量描述了整张图片的信息,提取出所有正负样本的HOG 特征后,将它们制作成数据文件,放入支持向量机中训练,如图2 所示。
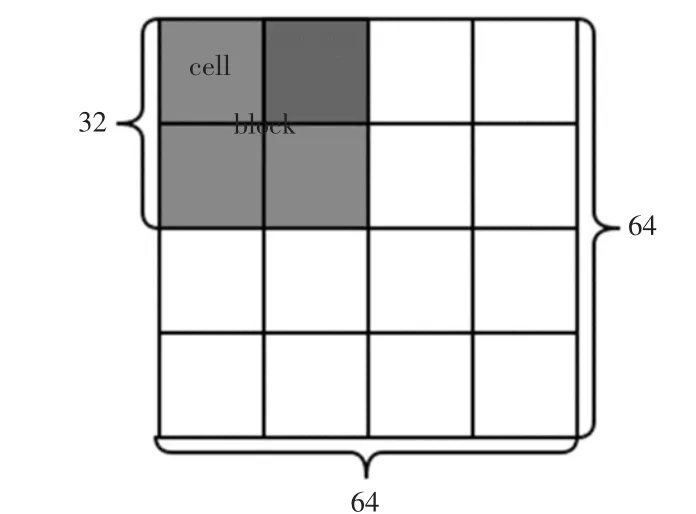
图2 块与细胞结构图解Fig.2 Structure Diagram of Block and Cell
4 实验与分析
利用MATLAB R2016a 和Libsvm-3.23 工具箱对不同光照条件下的轮毂进行识别实验,计算机为Win7 系统,配置i5 处理器,主频2.60GHz,内存为4G。
4.1 实验样本的设计
实验选取了两种不同型号的轮毂A 和轮毂B 在三种不同光照条件下(弱光、正常光和强光)拍摄得到的图片作为样本。将图片中的轮毂A 提取出来作为实验的正样本,将剩余轮毂B 的图片作为负样本。根据正负样本HOG 特征提取的计算方法,将预处理后的样本图片输入用MATLAB 编好用于提取HOG 特征的程序中,完成正负样本HOG 特征的提取,最后将所有样本的HOG特征值制作成用于训练的数据格式。现将部分正负样本以及提取出其中一对正负样本的HOG 特征给出,如图3~图5 所示。
图3 部分正负样本Fig.3 Positive and Negative Samples
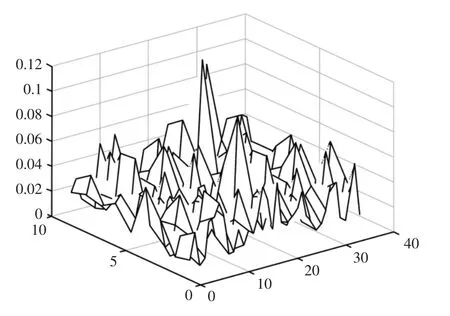
图4 正样本的HOG特征值Fig.4 HOG Eigenvalue of Positive Sample
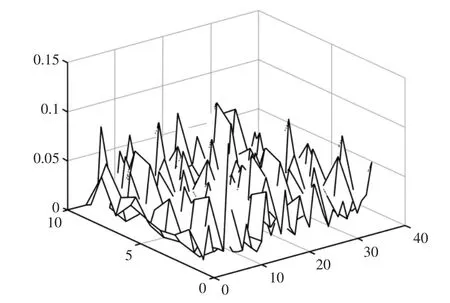
图5 负样本的HOG 特征值Fig.5 HOG Eigenvalue of Negative Sample
4.2 支持向量机的原理
在识别工具的选用上,采用的是支持向量机(Support Vector Machine,SVM)。其主要思想是将样本从原特征空间通过变换转换到高维特征空间,在高维特征空间中选取最优超平面进行分类。本实验的样本数据非线性可分,需要引入核函数K(x,xj)和ξi将输入空间的非线性可分样本数据通过函数映射到高维特征空间中,然后在高维特征空间中构造线性判别函数来代替原空间的非线性判别函数[6],最优分类函数为:

4.3 支持向量机参数的选择
本实验的支持向量机有两个参数需要选择:惩罚参数C 和径向基函数的参数σ。
实验主要使用交叉验证和网格搜索法对两个参数进行优选,使用的支持向量机库为Libsvm-3.23 工具箱,得到的参数,如图6 所示。可知最优参数C=32,σ=1,交叉验证精度为88.89%。
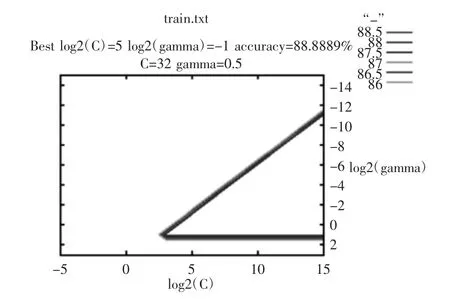
图6 交叉验证结果图Fig.6 Result Chart of Cross-Validation
4.4 支持向量机训练结果
训练好的分类模型参数,如表1 所示。
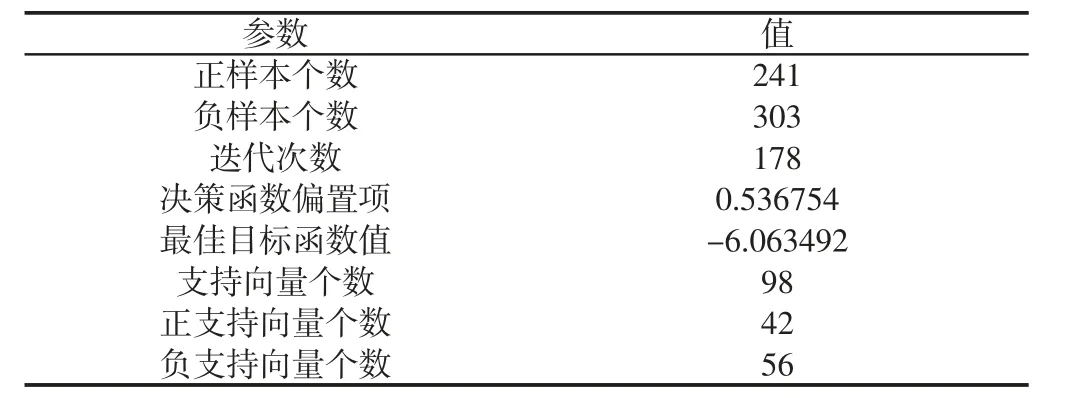
表1 训练模型的参数Tab.1 Parameters of Training Model
4.5 实验结果
为了验证所提方法的有效性,将这里的方法与基于灰度信息的模板匹配方法进行对比试验。分别选取弱光、正常光、强光和三种光照条件下混合的轮毂图片各150 张作为待识别样本。实验分为两个步骤:第一步,分别选取正常光照下的两类轮毂图片各一张作为模板,将待识别的轮毂图片与模板图片进行匹配识别;第二步,用支持向量机训练得出的模型对待识别的轮毂图像进行识别。两种方法的识别准确率,如表2 所示。由表中数据可知,基于灰度信息的模板匹配方法识别正常光照下的轮毂的准确率最高,非正常光照下的轮毂识别率较低;基于HOG 特征的轮毂识别方法在不同的光照条件下都有着较高的识别准确率。

表2 识别准确率Tab.2 The Accuracy of Recognition
5 结论
由上述可知,采用一种基于梯度方向直方图特征和支持向量机的轮毂图像分类方法,其结论如下:(1)与传统的基于灰度特征的模板匹配方法相比,HOG 特征对于光照的影响有很强的适应能力。(2)正常光照下的轮毂识别准确率与非正常光照下的识别准确率基本一致,光照对总体的识别效果并无较大的影响。
猜你喜欢
中国机械工程(2022年8期)2022-05-09
新高考·高一数学(2022年3期)2022-04-28
上海涂料(2021年5期)2022-01-15
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19
音乐教育与创作(2019年8期)2019-05-16
制造技术与机床(2017年10期)2017-11-28
制造业自动化(2017年2期)2017-03-20
高中生学习·高三版(2016年9期)2016-05-14
大型铸锻件(2015年1期)2016-01-12
新高考·高二数学(2015年11期)2015-12-23
