
基于ESO-MLD 的逆变器开路故障快速诊断方法
2021-06-05 09:14:00王霞霞陈超波杨雪芹
电源学报 2021年3期
王霞霞,陈超波,杨雪芹,高 嵩
(1.西安工业大学电子信息工程学院,西安 710021;2.西安邮电大学通信与信息工程学院,西安 710121)
随着电力电子技术的快速发展,含逆变器的电机驱动系统广泛应用于电动汽车、新能源发电、航空等领域。电机驱动系统是由电机、传感器、控制器和逆变器组成,这几部分都有可能发生故障。据统计,34%的电力设备故障是由半导体和焊接故障导致的[1],而逆变器中至少80%的故障来自于半导体故障[2]。逆变器故障会影响电机驱动系统的正常运行,进而造成经济损失。所以对逆变器开关管故障诊断方法的研究是非常有必要的。
逆变器故障主要分为短路故障和开路故障。逆变器开路故障是由开关管故障或驱动器故障引起的,而且驱动器栅极击穿也可导致绝缘栅双极型晶体管IGBT(insulated gate bipolar transistor)开路故障[3]。短路故障发生的持续时间很短,一般在电路中通过串联快速熔断器将短路故障转化为开路故障进行诊断。文献[4]综述了21 种开路故障和10 种短路故障的诊断方法,并对这些方法的优缺点进行了总结。目前,逆变器开路故障诊断的方法主要是基于电流信号[5-9]和电压信号的诊断方法[10-13]。文献[5]提出了一种基于平均电流Park 矢量法的逆变器故障诊断方法,其检测算法过于复杂,不易实现且依赖于负载;文献[6]研究了一种归一化直流电流法,解决了故障诊断对负载的依赖性问题,但此方法在闭环系统中诊断效率较低;文献[7]提出一种改进归一化直流电流法,此方法可用于闭环控制策略的系统中;文献[8]提出一种电流矢量轨迹斜率法,易受负载的影响,诊断速度慢;文献[9]研究了一种基于参考电流误差法的逆变器故障诊断方法,该方法利用参考电流与输出电流的差值来进行故障诊断,对负载变化具有一定鲁棒性,但不能用于开环系统;文献[10]研究了基于电压解析法的逆变器故障诊断方法,利用参考电压与实际测量电压相比进行故障诊断,该方法需要增加额外的电压传感器;文献[11]研究了基于开关函数模型的逆变器故障诊断方法,但建模时没有考虑开关管的死区时间,容易造成误诊断,而且该方法诊断故障时需要高速光耦器或比较器,成本较高;文献[12]建立了逆变器-电机混杂系统模型,通过三相电流估计值与实际测量值的差值来检测故障,根据电流变化规律建立的电流残差信息表定位故障;文献[13]提出了一种基于二阶滑模观测器与混合逻辑动态模型的无电压传感器逆变器开路故障诊断方法,该方法中滑模观测器的抖振现象较为严重。近年来,基于人工智能的故障诊断方法开始兴起,主要有神经网络法[14-15]、模糊逻辑法[16]、支持向量机法[17]等。
针对电机驱动系统存在外部干扰和不确定因素的问题,本文提出一种基于扩展观测器和混合逻辑动态模型的逆变器故障诊断方法。根据开关管在正常工作和故障状态下的电流流向路径构建逆变器的混合逻辑动态模型,以系统输出的三相相电压为检测量设计一种电压扩展观测器,并对相电压进行实时估计。通过观测器观测的相电压和实际系统相电压之间的残差进行故障检测,并依据故障状态下各相相电压残差之间的数值关系进行故障定位。最后,通过仿真证明该方法的正确性。
1 逆变器的混合逻辑动态模型
含逆变器的电机驱动系统的拓扑如图1 所示,其中,逆变器是由6 个IGBT T1—T6和6 个反向二极管D1—D6构成,Udc为直流侧电压,ia、ib、ic为三相绕组电流,e=[ea,eb,ec]为三相反电动势,R 为定子绕组电阻,L 为定子电感,F1—F6是快速熔断器。

图1 含逆变器的电机驱动系统的拓扑Fig.1 Topology of motor drive system with inverter
在逆变器和电机组成的系统中,将电机等效为电阻、电感和反电势串联组成的电路。电机的连续模型为

式中,uan、ubn、ucn为电机三相绕组电压。
根据电路约束关系和星型连接的特点可知
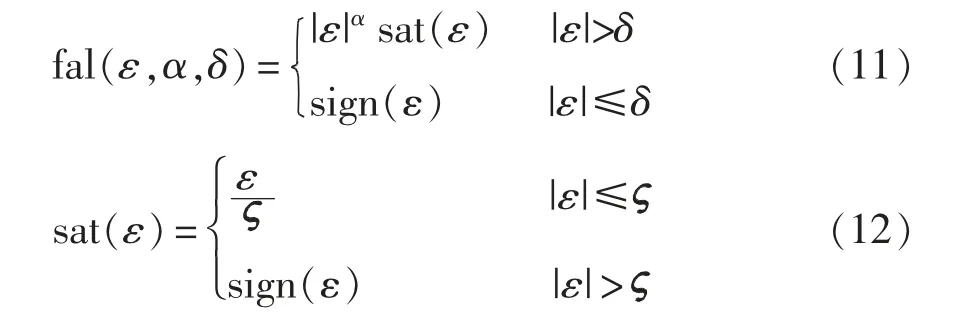
假定逆变器的6 个开关管的开关信号由符号s1—s6表示,1 表示开关管处于导通状态,0 表示开关管处于断开状态;δa、δb、δc表示电机三相绕组的电流流向,1 表示电流流入绕组,0 表示电流流出绕组。以c 相为例,如果δc=1,则说明c 相电流流入绕组,即ic>0;如果δc=0,则说明c 相电流流出绕组,即ic<0。其他两相的情况与此类似。
在实际应用中,逆变器中单个和2 个IGBT 发生开路故障的情况较多,所以本文讨论单个开关管和2 个开关管发生开路故障的诊断方法。以c 相为例,电流流向和开关信号的不同,会影响uco的运行状态。根据逆变器正常工作时电流的流向路径得到uco的运行状态,具体分析结果如表1 所示。

表1 c 相正常工作时uco 的真值表Tab.1 Truth table of uco when phase-c works normally
对表1 中的uco的状态进行逻辑运算,将uco不为0 的状态进行相或运算,可得uco的表达式为

根据a 相、b 相正常工作时uao、ubo的运行状态,可推导出uao和ubo为

即逆变器正常工作时,各相的相电压为

将式(5)代入式(2),可得三相绕组电压的表达式为

将式(6)代入式(1),建立逆变器的混合逻辑动态模型为

2 逆变器IGBT 开路故障诊断策略
在理想情况下,电机驱动系统输出的实际电压值与电压扩展观测器估计的电压值相等,即电压残差为0。当逆变器中开关管发生开路故障时,系统输出的电压波形会发生畸变,此时根据该状态的电压测量值与逆变器正常工作时的实际电压值之间的残差以及残差中所包含的故障信息进行故障检测和故障定位。本文所提故障诊断方法的诊断策略如图2 所示,当逆变器的开关管处于正常工作状态时,逆变器的混合逻辑动态模型和电压扩展观测器的输出均为正常电压值,且二者在数值上大致相等,即残差近似为0,也就是开关管没有发生开路故障;当逆变器的单个开关管或2 个开关管发生开路故障时,根据逆变器混合逻辑动态模型输出的三相电压实际值u 和电压扩展观测器观测的三相电压估计值产生的电压残差Δu 进行故障检测,利用电压残差Δu 包含的故障信息建立残差信息表进行故障定位。电压扩展观测器利用系统状态变量三相电流i 和扰动量,以及利用电机的反馈信号(电角度θ、角速度ωs和给定磁通ψ)得到控制量反电动势e 来估计三相电压。

图2 逆变器开路故障诊断策略框图Fig.2 Block diagram of diagnosis strategy for inverter under open-circuit fault
2.1 扩展观测器的设计
在电机驱动系统中,为了解决其他硬件电路或传感器的引入而降低故障诊断精确率的问题,本文设计了一种电压扩展观测器对输出的三相相电压进行实时估计,进而消除系统中其他一些未知干扰和不确定因素的影响,提高故障诊断精确率。
设一种受未知扰动作用的非线性不确定系统[18]的表达式为

式中:f(x,x(1),…,x(n-1),t)为未知函数;ω(t)为未知扰动;x(t)、u 和y(t)分别为系统状态变量、系统控制量和输出变量;b 为控制量增益。
将x(n)(t)扩张到状态变量中,即状态变量被扩张为x(t),x(1)(t),…,x(n-1)(t),x(n)(t)。系统以x(t)为输入分别跟踪这些扩张的状态变量,即z1→x(t),…,zn→x(n-1)(t),zn+1→a(t),a(t)=(x,x(1),…,x(n-1),t)+ω(t)。则系统的扩展观测器可设计为
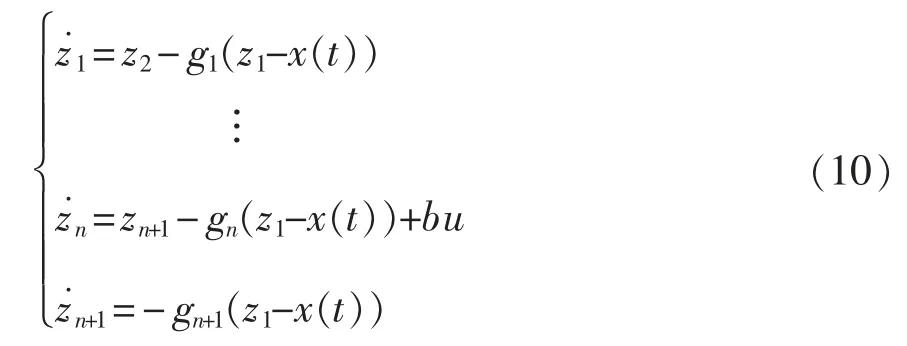
式中,gi(·)为非线性函数,一般取如下形式
将逆变器的混合逻辑动态模型式(8)改写成

式中,u=B1σ=[uanubnucn]T。
根据式(13)设计扩展观测器时,输出z1跟踪电机驱动系统的三相电流i,z2观测电机驱动系统的三相电压扰动,则设计的扩展观测器模型为

式中:β1、β2为观测器系数;α1、α2为非线性因子;δ1、δ2为滤波因子;ε=z1-i;f0(z1)=Az1;b=B2;u1=e。由式(18)即可得到电机驱动系统的三相电压u 的实时估计值。在设计的电压扩展观测器模型中,系统的状态变量为三相电流i 和扰动量,系统的控制量为反向电动势e,系统的输出量为三相电流i 和三相电压扰动量。本文是利用观测系统的三相电流得到三相电压的估计值。上述电压扩展观测器观测系数β1和β2是通过参考文献[19-20]和多次仿真实验相结合确定的,β1,β2是调节响应速度的比例系数,其值越大,跟踪越快,但同时会导致滤波效果变差。δ1、δ2为Fal 函数滤波器的滤波因子,滤波因子越大滤波效果越好,但同时也导致了跟踪大大延迟,所以需要综合考虑滤波效果和跟踪效果,在二者之间折中考虑,一般情况下滤波因子可取5T≤δ≤10T,其中T 为采样时间。也可根据仿真实验效果适当调整滤波因子的数值,进而达到更好的滤波效果。非线性因子α1、α2一般在0~1 之间取值,非线性因子的数值越大,跟踪效果越快,但同时会导致滤波效果变差。所以在设定观测系数β1和β2、滤波因子δ1和δ2以及非线性因子α1和α2时,需要在三者之间综合考虑[21]。
2.2 基于相电压残差的逆变器开路故障诊断方法
2.2.1 单个开关管发生开路故障
以c 相为例,对T5、T6任意一个开关管发生开路故障进行分析,得到各自发生开路故障的电压残差。当只有T5一个开关管发生开路故障时,电流的流向路径如图3 所示,其中,虚线代表开关管处于开路故障。
图3 T5 发生开路故障时电流流向路径Fig.3 Current flow path when open-circuit fault occurs at T5
表2 T5 开路故障时的真值表Tab.2 Truth table of when open-circuit fault occurs at T5

表2 T5 开路故障时的真值表Tab.2 Truth table of when open-circuit fault occurs at T5

即仅有T5发生开路故障时,各相的相电压为

由式(6)和式(16)可得,仅有T5发生开路故障时电压残差为

由式(17)可得,当仅有T5发生开路故障时,a、b 相的电压残差均为非正数,c 相的电压残差为非负数且数值上是a、b 相的2 倍,根据电压残差的正负即可判断是哪相的开关管发生了开路故障。
2.2.2 2 个开关管同时发生开路故障
当c 相上的2 个开关管T5、T6同时发生开路故障时,电流的流向路径如图4 所示,其中,虚线代表开关管处于开路故障。


图4 T5、T6 同时发生开路故障时电流流向路径Fig.4 Current flow path when open-circuit fault occurs at T5 and T6 simultaneously
表3 T5、T6 开关管同时故障时的真值表Tab.3 Truth table of when fault occurs at T5 and T6 simultaneously

表3 T5、T6 开关管同时故障时的真值表Tab.3 Truth table of when fault occurs at T5 and T6 simultaneously
即当开关管T5、T6同时发生开路故障时,各相的相电压为

由式(6)和式(19)可得,开关管T5、T6同时发生开路故障时电压残差为
由式(20)可得,当T5、T6同时发生开路故障时,a、b、c 三相的电压残差均可正可负,但c 相的电压残差为a、b 相的2 倍,也就是说可以通过三相电压残差之间的关系对故障相进行定位。
同理,该方法也可对a、b 相的开关管发生开路故障进行处理,得到a、b 相在不同故障情况下的电压残差,其结果如表4 所示。
3 仿真结果分析
在Matlab/Simulink 中搭建图1 所示的仿真模型,仿真参数如下:直流侧电压为Udc=360 V,频率为50 Hz,定子电阻为Rs=0.435 Ω,转子电阻为Rr=0.816 Ω,定子漏感Lls=4 mH,转子漏感Lrs=2 mH,互感Lm=69.31 mH,极对数p=2,转动惯量J=0.089 kg·m2,给定磁通ψ*=0.95 Wb。设定扩张观测器的参数β1=15,β2=300,α1=0.55,α2=0.35,δ1=0.2,δ2=0.1。通过多次仿真实验,电压残差的阈值设定为Uth=0.16 V。为了逆变器中开关管开路故障诊断实现后可以简单明确地显示开关管的故障信息,在仿真模型中利用单位阶跃信号来指示故障开关器件。当逆变电路无故障时,故障指示器上的数值均为1;当逆变器中有开关管发生开路故障,通过一定的算法使得故障指示器上的数值由1 变为0,这样就可以直观地看到故障相和故障开关管。逆变器正常工作时,三相电压和开关管工作状态信号波形如图5 所示,可见,电压扩张观测器观测的电压与实际系统的电压基本吻合,跟踪效果好。

图5 正常三相电压和开关管工作状态信号波形Fig.5 Waveforms of three-phase voltage and working status signal of switches in the normal operation state of inverter
3.1 单个开关管开路故障
图6 为T5管发生开路故障的三相电压和开关管工作状态信号波形。在t=0.3 s 时移除T5管的驱动信号,即T5管发生开路故障,此时c 相电压残差正向迅速增加,a、b 两相的电压残差负向增加并且二者的增加趋势大致相同,在数值关系上c 相的电压残差大致是a、b 两相电压残差的2 倍,所以根据电压残差信息(表4)可以判断是c 相的T5管发生了开路故障,同时在开关管工作状态信号波形上也可直观地看到,在0.3 s 时T5管发生了开路故障。

表4 各相的相电压残差信息Tab.4 Phase voltage residual information for each phase
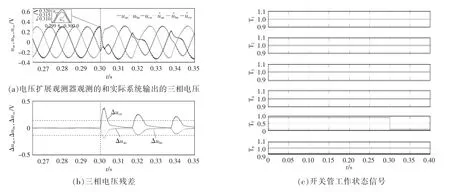
图6 T5 管发生开路故障的三相电压和开关管工作状态信号波形Fig.6 Waveforms of three-phase voltage and working status signal of switches when open-circuit fault occurs at T5
3.2 2 个开关管同时开路故障
图7 为T5和T6管同时发生开路故障的三相电压和开关管工作状态信号波形。在t=0.3 s 时,同时移除T5和T6管的驱动信号,即T5和T6管同时发生开路故障,此时c 相的电压残差先正向迅速增加,a、b 两相的电压残差负向增加并且二者的增加趋势大致相同,在数值关系上c 相的电压残差大致是a、b 两相电压残差的2 倍,根据电压残差信息(表4)可先诊断出T5管发生开路故障。然后c 相的电压残差负向迅速增加,a、b 两相的电压残差正向增加并且二者的增加趋势大致相同,在数值关系上c 相的电压残差大致是a、b 两相的电压残差的2倍,同样根据表4 诊断出T6管发生开路故障。在开关管工作状态信号波形上可直观地看到,在0.3 s时,T5和T6管同时发生了开路故障。
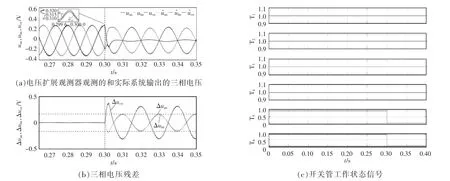
图7 T5 和T6 管同时发生开路故障的三相电压和开关管工作状态信号波形Fig.7 Waveforms of three-phase voltage and working status signals of switches when open-circuit fault occurs at T5 and T6 simultaneously
4 结语
本文通过逆变器正常工作和故障状态下的电流流向路径建立了逆变器的混合逻辑动态模型,考虑到建模过程中开关信号的死区时间,避免了误诊。同时设计了一种电压扩展观测器,避免了其他硬件路或传感器的引入增加故障率的问题。仿真结果表明该方法的诊断时间仅需0.015 s,能对单管故障和同相双管故障精确定位。今后可研究不同相的2 个IGBT 同时发生开路故障诊断方法,并加入一定的容错策略,以保证逆变器在故障状态下也可以正常工作。
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23 13:26:48
建材发展导向(2021年7期)2021-07-16 07:07:28
北京航空航天大学学报(2020年10期)2020-11-14 09:26:02
自动化学报(2019年6期)2019-07-23 01:18:32
青年歌声(2019年2期)2019-02-21 01:17:36
知识经济·中国直销(2017年11期)2017-11-28 05:34:13
中国公路(2017年16期)2017-10-14 01:04:46
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
