
基于改进粒子群算法的LED照明均匀性的研究
2021-06-04 03:15:18雒强杰张团善
微型电脑应用 2021年5期
雒强杰, 张团善
(西安工程大学 机电工程学院, 陕西 西安 710048)
0 引言
LED作为第四代照明光源,由于高光效、体积小、低能耗等特点,在工业中得到广泛的应用[1]。因单个LED发光效率有限,为了提高发光效率,使其能应用于各种场合需要,采用阵列排布的方式来满足。但LED发光近似朗伯分布,会使得光照不均匀。为了解决这类问题,对LED还需进一步光学设计,提高它的均匀性。在解决光照均匀问题方面,目前主要有以下方法。文献[2]中,在机器视觉对图像质量高要求的基础上,找出设计过程中可能对图像的成像质量影响的主要因素,设计出一种环形结构的LED阵列,有效提高成像的质量。但针对的结构单一,不具普遍性。文献[3]是LED照明质量方面和其显色性的研究,建立评价的数学模型,通过两个针对性的实验,得到LED的显色性和显色指数的视觉可参考标准,但采样光源单一,未涉及结构的影响。文献[4]中为了得到较大范围均匀的LED照明,在能量守恒和光线折射定律的基础上,通过仿真编程得到自由曲面透镜模型,仿真得出均匀性达80%以上的照度分布。但是没有考虑阵列LED之间的位置分布。而且LED数量的多少取决于被照面的光照度要求及照明光学系统的空间光强分布。
本文在以上所涉及问题的基础之上,通过LED朗伯体发光模型,推导照射面的阵列分布光照度模型。以照射面光照强度的均方根差作为评价函数。算法改进之后优化的位置分布,使照射面的光照度具有较高的均匀性。
1 光源的模型
1.1 单个光源模型
LED属于朗伯型发光体,它的光强分布由具体发光角的余弦值所决定[5]。因此两者关系的近似方程,为式(1)。
E(r,θ)=E0(r)cosmθ
(1)
其中,θ是光源的发光角;E0(r)是θ=0方向上距离为r处的照度值;m为光源的朗伯辐射指数,和LED芯片的生产工艺有关。当m=1时,LED可当作理想朗伯光源。受到工艺限制,其值通常大于1。由式(1)可知,m值越小,光照强度E会越大。其值计算式,如式(2)。
m=-ln2/[ln2(cosθ1/2)]
(2)
其中,θ1/2是光源的发光强度为最大值一半时的角度。在制作生产的时候已经确定。由式(1)、式(2)计算可得,当LED光照与接收面垂直时,得到光强式,如式(3)。
(3)
其中,z为光源到照射平面的距离;I0为光源法线上的光强。为了便于研究,将式(3)在直角坐标系下转换坐标,可设光源平面上某一点A(x,y,z)距离光源平面z的照射面上某一点C(xp,yp,0)处的光照强度,为式(4)。
(4)
1.2 LED阵列照度分布模型
因为单个LED芯片的发光功率很小,通常用多个LED成阵列分布使用,用来满足不同场合的要求。本文采用平面阵列分布共有N个来进行研究。因为LED是一种非相干光源,故C点的光照强度是N个光源(xi,yi,z)在C点处的叠加。
由式(4)可得,N个光源到照射面C点的总光照强度,如式(5)。
(5)
1.3 光照度均匀性模型
根据国家标准规定,实验室及等室内的平均照度值至少是300lx。定义的照射面均匀度为最小照度与均匀照度之比,即U=Emin/Eav。本文采取上述方法评价光照均匀性,为了便于计算,将照射平面分为N×M个点,由式(5)得出照射面上的平均光照强度,以及标准差,如式(6)、式(7)。
(6)
(7)
对于照射平面的均匀性判定,不同的研究对其有着不同方式的定义,本文使用均方根误差作为评价函数,来判定照射面的均匀性。取均方根误差作为适应度函数,如式(8)。
f(x1,y2;…;xi,yi;…;xn,yn)=σ/Eav
(8)
其中,Eav表示照射面的平均照度值,均方根误差作为目标照射面的评价函数。来反映目标照射面的光照均匀性,均方根误差函数值越小,照射面的均匀性越高。
2 算法设计
2.1 传统的算法
粒子群算法是生物学家和社会心理学家受到鸟类的群体行为启发,进行建模仿真后提出的一种仿生优化算法,此算法是个体间通过相应的合作与竞争,搜索空间中的最优解[6]。算法优化首先生成初始种群,每个粒子都可能是函数问题的一个解,通过不断地迭代寻优,在解空间中跟随局部和全局两个极值来更新自己的状态,也就是粒子目前寻找到的最优解和整个群体当前所找到的最优解。通过适应度来评价解的品质。算法原理:先假设一个任意维度的空间,由这个空间中的所有粒子组成群体。可以假设Xi=(Xi1,Xi2,…,XiD)T是第i个粒子的位置,通过适应度函数计算Xi计算当前的适应度值。此时的速度为Vi=(Vi1,Vi2,…,ViD)T,对应个体的极值为Pi=(Pi1,Pi2,…,PiD)T,整个群体极值为Pg=(Pg1,Pg2,…,PgD)T。在迭代过程中,更新的速度和位置,如式(9)、式(10)。
(9)
(10)
其中,d=1,2,…,D,即自变量的个数;i=1,2,…,N,N是种群的规模;ω为惯性权重;c1,c2为加速因子,其范围在(0,4)之间;rand是(0,1)之间的随机数。
2.2 算法的改进
通常传统的粒子群算法迭代更新到后期时,群体中粒子位置与群体最优位置之间的差异会变小,导致粒子的多样性会降低,算法全局搜索能力下降。为了改善这种情况,需要对惯性权重进行调整。标准的惯性权重,如式(11)。
(11)
其中,ωstart=0.9,ωend=0.4,t是粒子当前的迭代次数;tmax是最大迭代次数。整个算法的搜索过程是非线性的,较大的ω有利于对种群进行全局寻优,而较小的ω更适合进行局部寻优,这样可以加快算法的收敛。但是权重按这样变化会影响后期的最优解,所以对惯性权重的改进可以提高算法的优化分布。
本文提出对粒子群算法改进惯性权重[7]。权重是随着适应度值改变而改变。当粒子的位置趋近于局部优化时,权重增大,反之权重减小。优化过程中,有的目标函数值高于平均目标值的粒子,对应的惯性权重较小,则保留;有的目标函数值低于平均目标值的粒子,对应的惯性权重较大,则略去。让算法在寻优过程中避免两种(即局部寻优和提前寻优)可能影响结果的情况,如式(12)。

(12)
其中,f是粒子当前的适应度函数值;favg为群体平均适应度值;fmin是最小适应度值。
改进算法后优化光源的步骤如下:包括种群个数、迭代次数以及粒子的位置、速度和初始参数等,对种群初始化;根据式(6)、式(7),计算各个粒子的适应度,求解出个体最优值和群体最优值。通过式(9)、式(10)来更新粒子的位置、速度。当迭代次数达到设定最大次数时,则退出迭代,输出结果,否则转到步骤(2)继续执行。流程如图1所示。
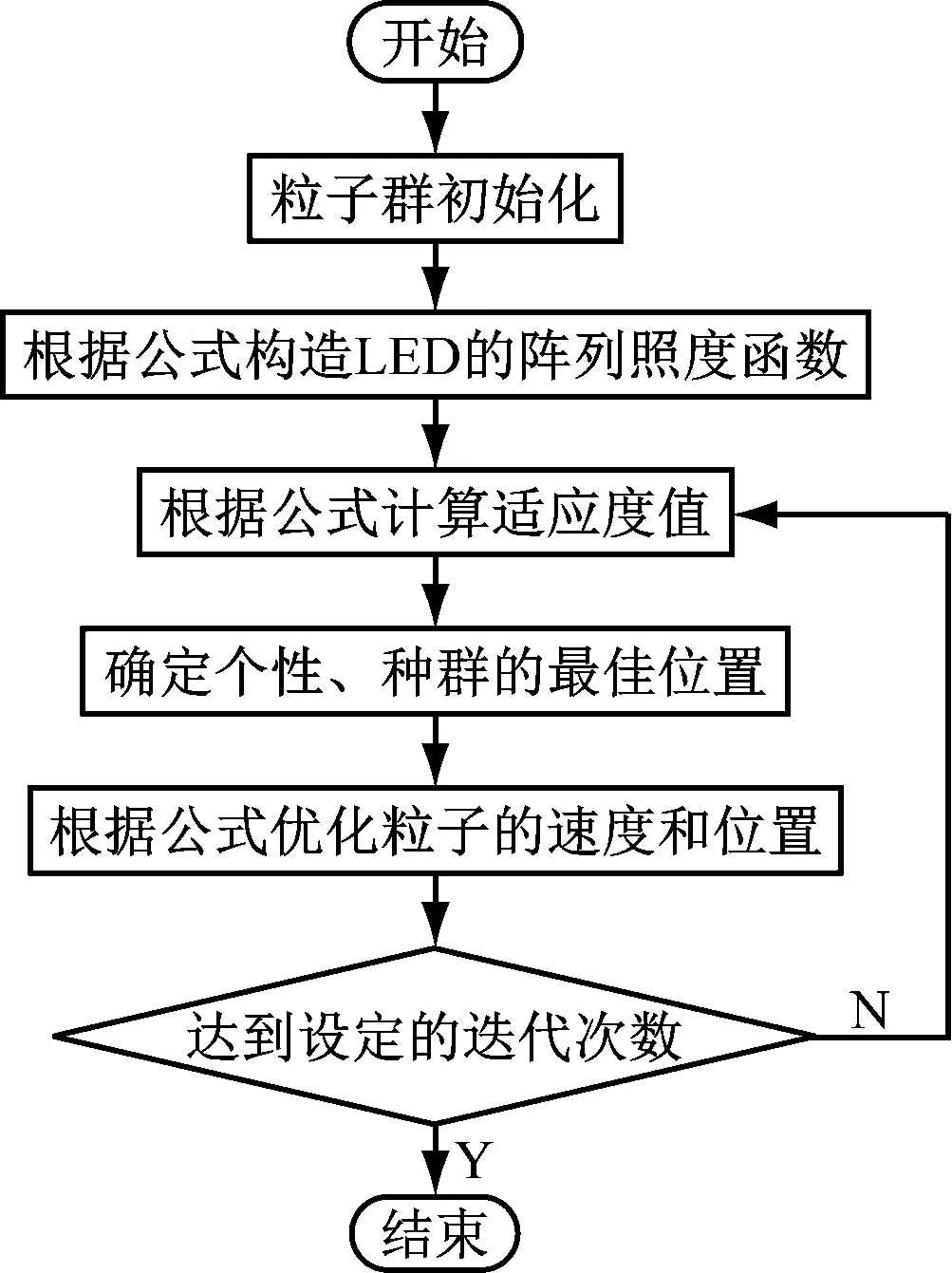
图1 流程图
3 仿真试验
3.1 算法的仿真
改进后算法的优化过程在软件Matlab2019b下仿真,参数初始值,如表1所示。
表1 算法参数值表
仿真结果,如图2所示。
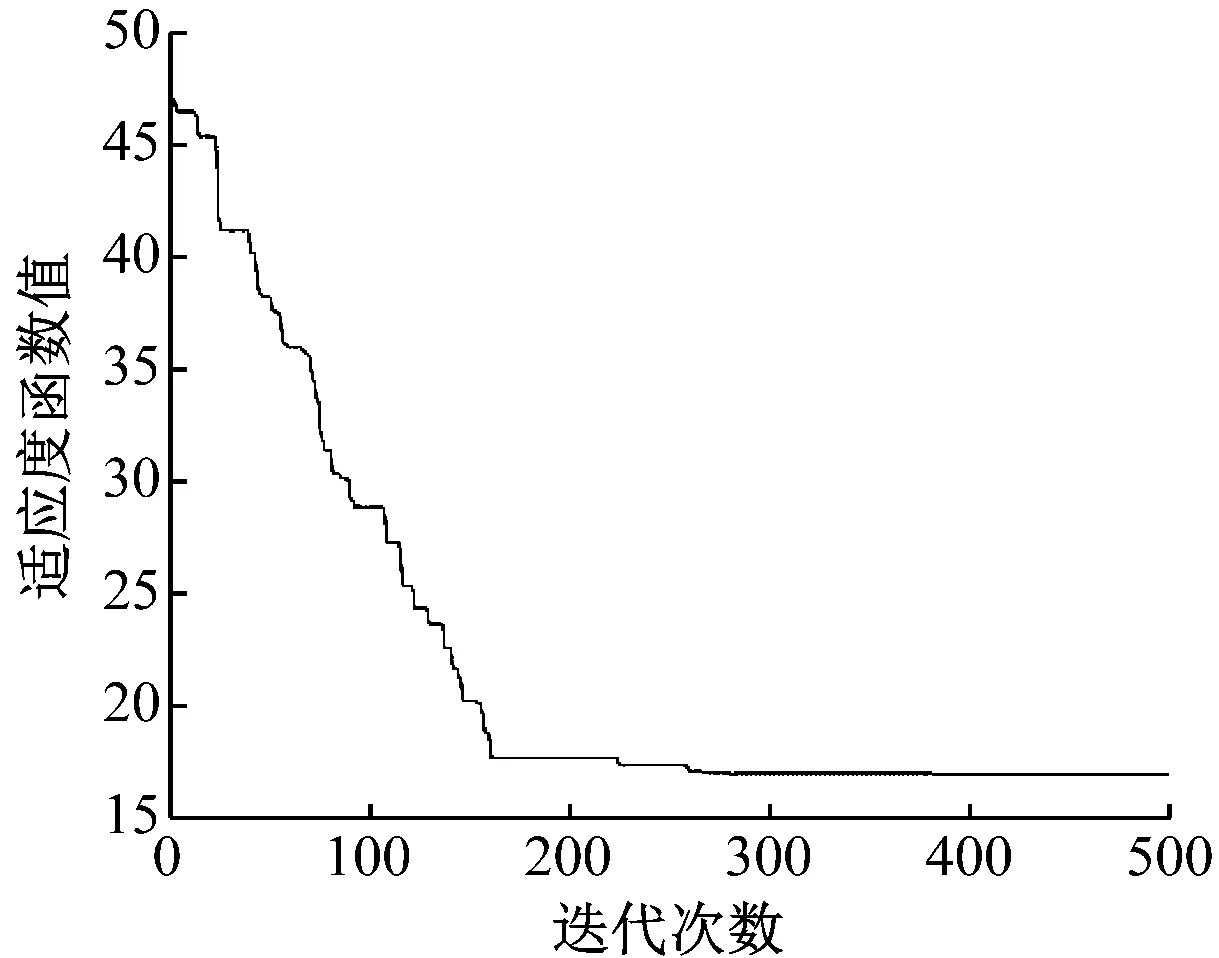
图2 算法迭代过程
如图2可知,通过粒子群算法优化收敛情况可知,适应度函数值及均方根误差值随着迭代的次数而降低,在迭代160次时基本达到最小值,改进算法之后的优化过程得到一定的提升,提高了优化速度。
3.2 仿真分析
Tracepro是一种基于蒙特卡罗的非序列光线追迹软件,由美国Lambda Research公司开发,具有强大的光学分析功能[8]。能够较为清晰地搭建算法优化后的模型,因此选择在该软件中建立模型[9],如图3、图4所示。
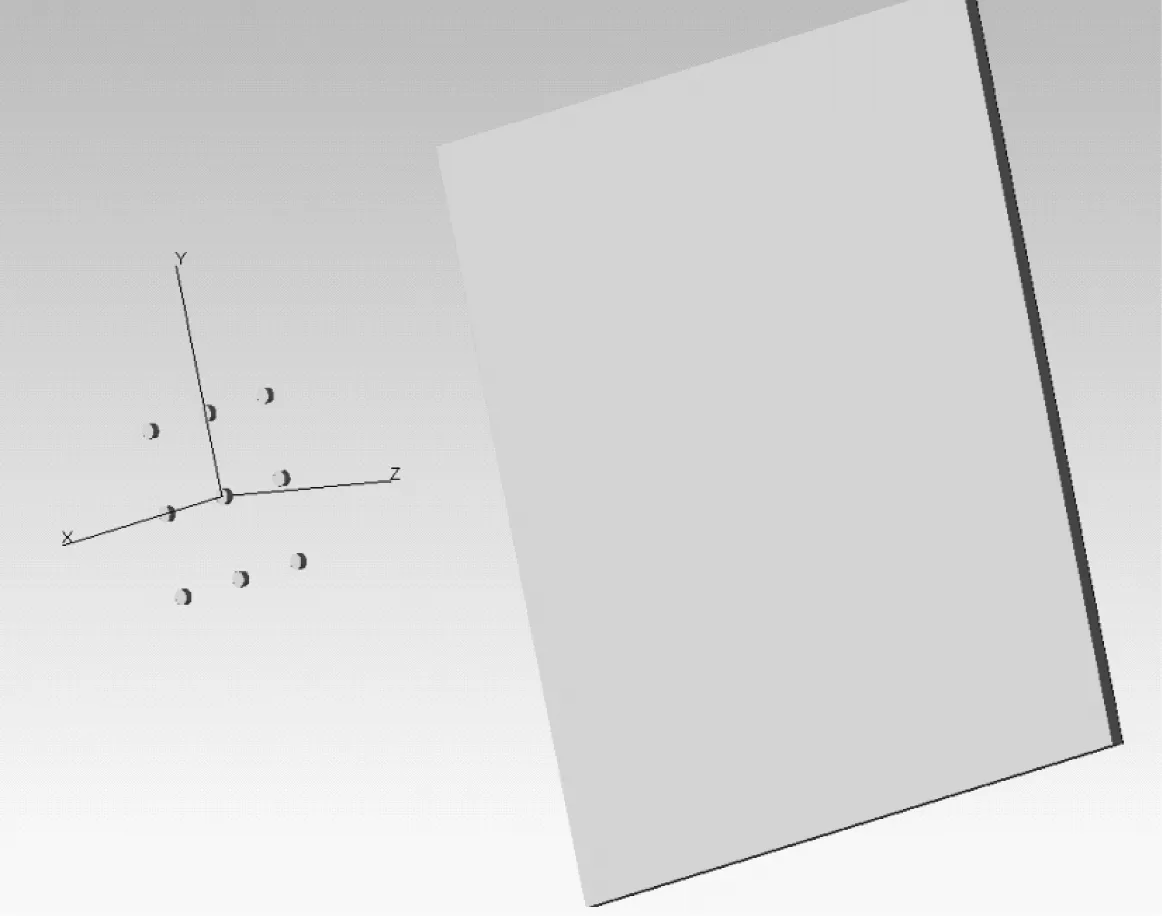
图3 优化前LED阵列
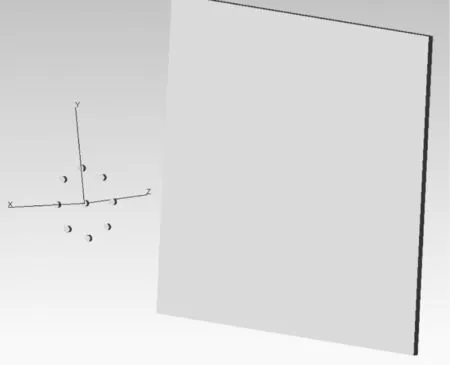
图4 优化后LED阵列
在软件Tracepro中对其进行模拟,比较算法优化阵列位置前后模型的照度变化。首先建立对应的阵列模型,发光芯片均为1×1×1(毫米)的立方体,设置LED出射角度符合朗伯反射规律,波长设置为可见光范围内的500 nm,单个LED光源的出射光线均为10 000条。所得结果如图5、图6所示。
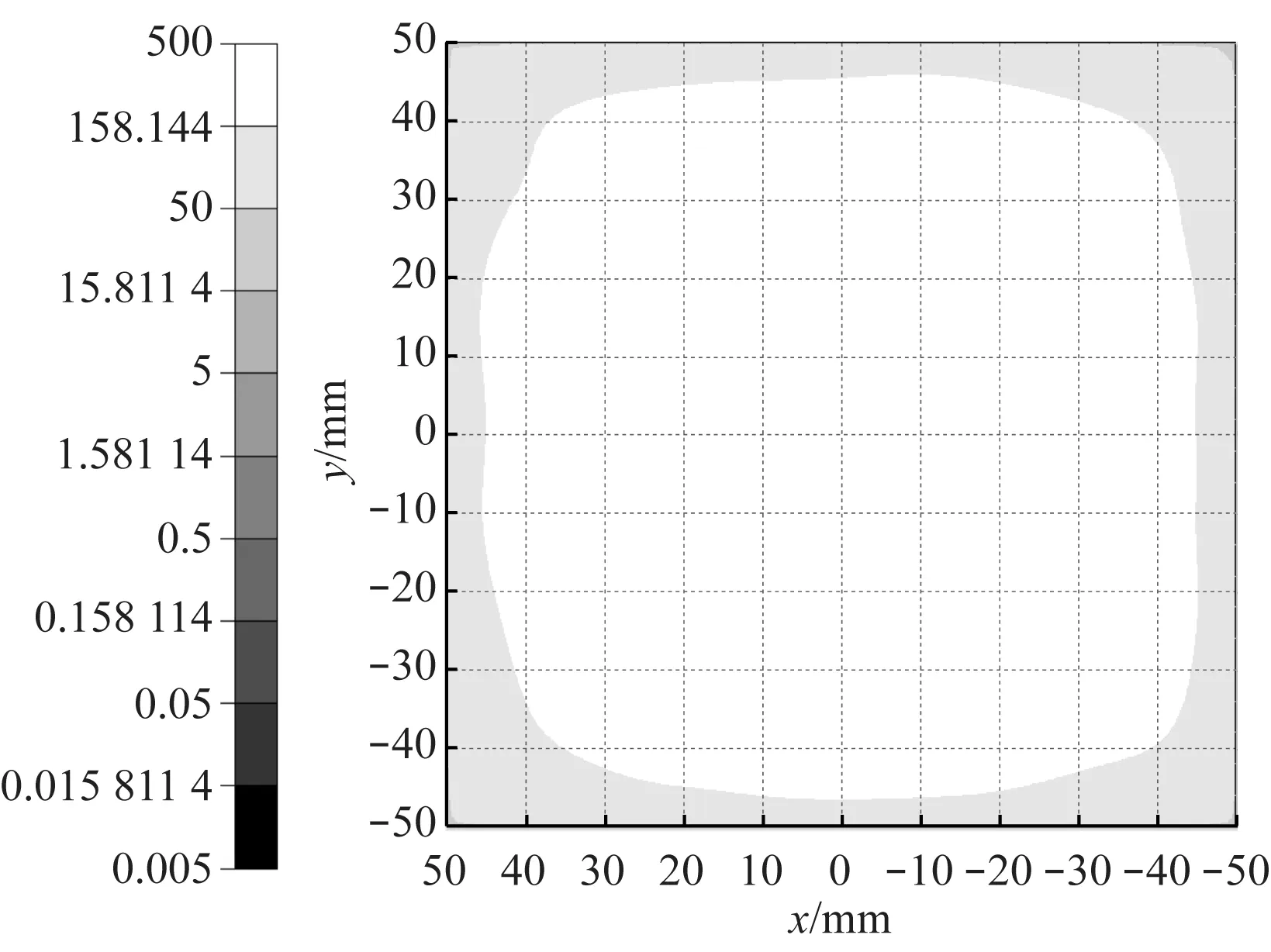
图5 优化前LED阵列的照度分布图和照度轮廓图
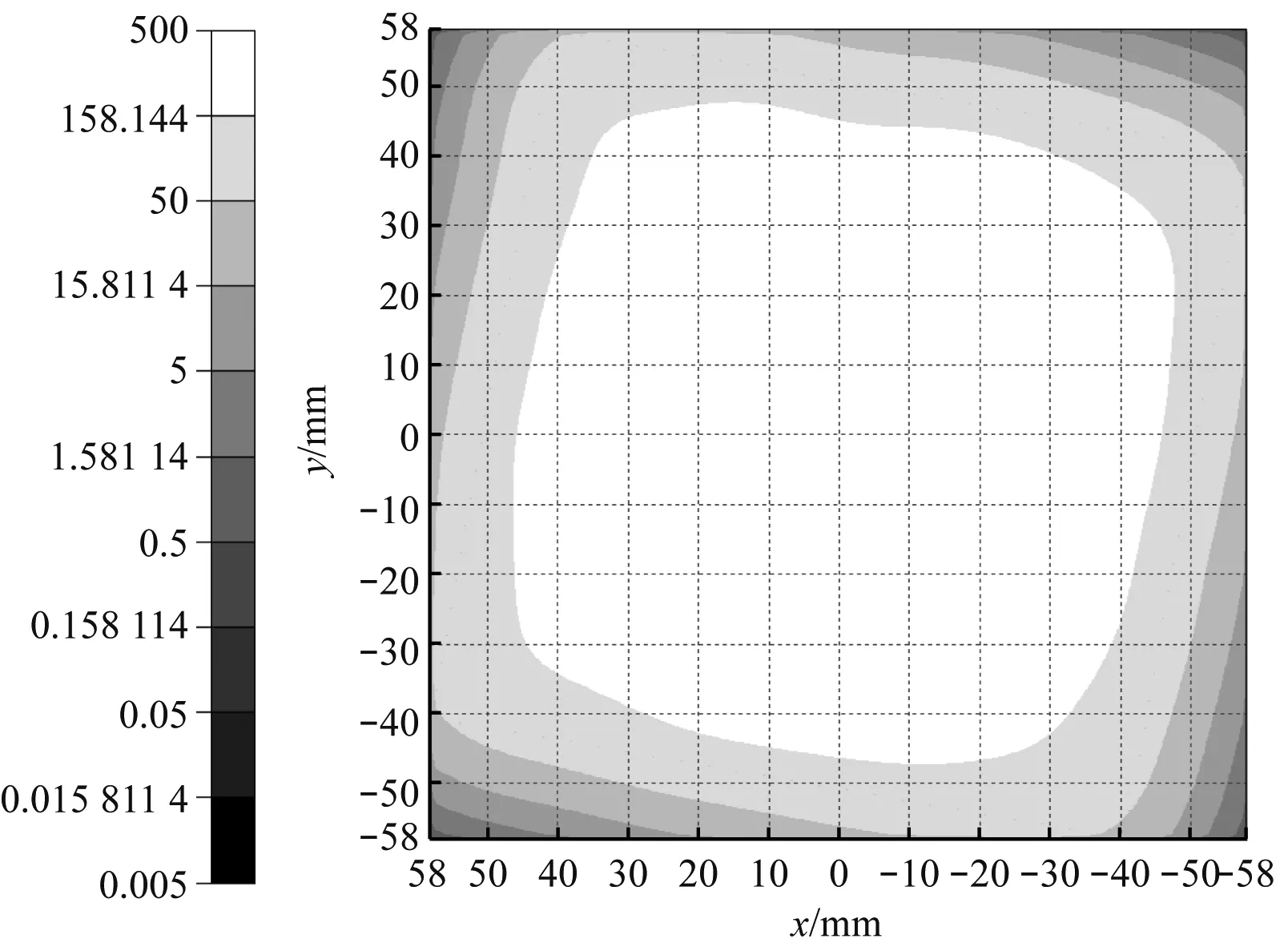
图6 优化后LED阵列的照度分布图和照度轮廓图
图5是优化前LED阵列的照度分布图和照度轮廓图。图6是优化后LED阵列的照度分布图和照度轮廓图。
由仿真结果可知,优化前的辐射的照度平均值为201.9;而算法优化后阵列辐射的照度平均值为215.2。考虑到LED因制作工艺和材料等因素的影响,要丢失一部分光线;同时由其原理可知,朗伯体光源在发光时会丢失一部分。除去这些损失之后,再通过对照射面上的照度图进行分析。可得出经改进的粒子群算法优化的阵列聚光性更好。
4 总结
(1) LED的阵列研究对于解决光照要求较为精确的应用场合有着重要的实际意义;
(2) 粒子群算法因算法结构简单特点,通过群体寻优的方式来找到最优解,对LED的阵列寻优有着算法理论的支持。
(3) 本文在阵列LED光照不均匀的问题上。通过分析光源阵列光照和粒子群算法的特点,对LED的阵列分布用该算法进行优化,以均方根差作为评价照射面均匀度的目标函数。通过改进的算法优化阵列,将优化前后的阵列进行仿真,比较其前后的照度特性。
(4) 仿真结果表明,算法优化后的均匀性得到一定的提高。本文仿真结果为LED的设计提供了一定的参考价值。
猜你喜欢
中学生数理化·七年级数学人教版(2023年3期)2023-03-21 00:44:56
计算机仿真(2022年8期)2022-09-28 09:53:02
光源与照明(2019年4期)2019-05-20 09:18:24
电子测试(2018年9期)2018-06-26 06:45:40
自动化学报(2017年2期)2017-04-04 05:14:28
中学生数理化·七年级数学人教版(2016年2期)2016-05-30 21:20:57
中国塑料(2016年11期)2016-04-16 05:26:02
新高考·高二数学(2014年7期)2014-09-18 17:20:45
教育与职业(2014年16期)2014-01-19 01:24:36
舰船电子工程(2010年1期)2010-04-26 05:06:48
