
一种基于特征组合分类的杂波背景下红外弱小目标检测算法*
2021-06-04 04:12
舰船电子工程 2021年5期
(中国人民解放军海军装备部装备项目管理中心 北京 100071)
1 引言
传统的红外跟踪光电设备项目,红外搜索与跟踪系统具有周视扫描搜索的特点,可以实时获取360全景图像进而得到态势信息,是全空域实时探测的关键。但是,红外搜索与跟踪系统获取的图像数据量大,背景类型和差异性极大,包含天空云杂波背景、地面建筑物背景、地物自然背景和飞鸟等各种干扰,给目标检测带来了极大的困难。
复杂背景下弱小目标检测的难点在于,红外小目标尺寸小,亮度往往低于云杂波、人工建筑物的亮度,极易淹没在背景中,难以通过轮廓和亮度信息完成对目标和干扰杂波的有效分类。为了在杂波背景中检测弱小目标,业内学者提出了一些方法。Kim[1]等提出了基于目标局部灰度标准差、局部频率能量等特征信息的分类方法,这类特征信息受图像背景灰度、干扰物亮度的影响较大。Wang[2]提出了一种利用四个特征对目标威胁程度进行评估的方法,可以有效区分海面目标的威胁程度,一定程度抑制海面杂波的干扰。Wang[3]通过局部对比度、目标尺寸和目标局部分割占空比等特征信息区分目标和干扰杂波,但是该算法对每个特征信息采取独立的门限判断,特殊背景下某些特征算子会失效,易引起误判。Deng等采用了一种改进的局部对比特征算子,提出了一种加权的局部差异测量特征用于杂波抑制[4]。近年来基于卷积神经网络类算法在红外目标检测方面得到应用,SSD[5]、DSSD[6]、YOLOv3[7]、YOLOv4[8]等在多个网络层上进行检测,提高了网络在不同尺度目标的检测效果,但是这类算法对目标尺寸有一定的限制,难以适应点状目标的检测。目前,机器学习[9~11]类算法在目标检测场景中也具有较好的表现。
本文分析了红外目标成像模型和典型干扰杂波的灰度特性,选取了一组可以有效区分红外弱小目标和干扰杂波的特征组合,包含局部梯度、局部占空比和分割形态特征等,然后利用支持向量机(SVM)对不同特征组合进行学习和评估,实现真实目标和干扰杂波的有效分类。
2 目标模型和背景灰度特征分析
分析目标与背景特征的差异性是实现目标和干扰杂波准确分类的基础。远距离目标的红外辐射经过大气传输后,辐射能量进入红外探测系统的光学窗口被传感器接收,能量在大气传输过程中,大气衍射效应会使目标在红外焦平面阵列上形成弥散光斑,辐射衍射可近似为高斯分布的点扩散函数,红外弱小目标的灰度分布可以用二维高斯分布近似为

式中:x0、y0是目标中心坐标;Pr·Ppsf表示目标中心亮度。
图1是红外探测系统获取的实际点目标图像及其点目标局部区域的灰度分布图,图中,左边为点目标图像,右边为图灰度分布。

图1 小目标弥散模型
弱小目标和典型地物背景全景红外图像具备如下特征:
1)弱小目标一般在空中,灰度分布呈高斯帽状,尺寸一般小于10×10像素,形态单一,缺少足够的轮廓细节信息。
2)低空全景图像区域分布广,背景灰度起伏较大,主要干扰包括人工建筑物、地面山林、云层和其他地物干扰。
3)干扰物往往呈现片状、条状,面积具有不确定性但远远大于小目标,干扰物形状与小目标具有显著的区别,干扰物的灰度可能大于目标灰度。

图2 典型地物背景图像
3 基于特征差异的目标检测与识别
红外搜索与跟踪系统需要从单帧高分辨率图像中检测出疑似目标,并对疑似目标进行分类识别,剔除云层、地物等杂波干扰,保留真实目标。该算法先通过TOPHAT滤波器抑制图像背景;然后对滤波后的图像进行自适应分割和聚类处理,得到可疑目标信息;然后统计可以目标的局部特征信息,形成特征信息组合;最后利用SVM分类器对特征信息分类,实现真实目标和干扰杂波的精细识别。基于特征差异的目标检测与识别流程如图3所示。
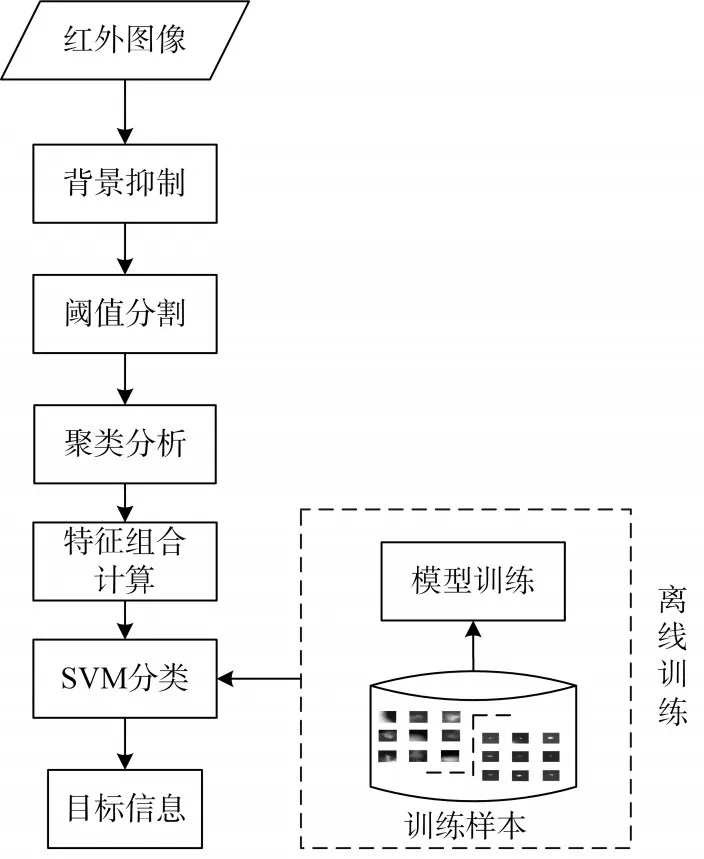
图3 目标检测算法框图
3.1 Tophat背景抑制算法
红外图像中的背景部分灰度变化平缓,在频率域以低频成分为主,目标为灰度突变的点状,主要是高频成分,可以用高通滤波器实现图像背景和目标的分离。常用的背景估计滤波器有Max-Mean滤 波[12],Max-median 滤波[13],Tophat滤 波[14]等,Tophat滤波属于非线性滤波器,具有一定的保边缘特性,对图像背景拟合的精度较高。
形态学Tophat变换可以描述为

其中,f为变换前图像,b为结构元素,ftop为Tophat变换后的图像,°为形态学开运算。
3.2 目标特征组合
为了区分小目标和背景干扰,这里设计了一组目标特征组合,包括局部梯度等级、八邻域梯度标准差、目标局部占空比、二阶矩和圆形度。将这些特征组合为一个向量,组合方式为

其中,F为特征组合,[Np,Sf,R,D,SL] 为组合特征的特征元素。
1)局部梯度等级
对于红外小目标,其目标中心灰度一般大于其周边灰度,目标局部有一定的对比度。分别对目标中心和邻域8个方向取样,计算中心灰度均值与8方向局部均值的差值(梯度),局部梯度等级为差值大于0的数量,定义如下:

其中,Np表示中心灰度均值与8方向局部均值的差值大于0的数量,count(*)为Ci大于0的数量,Ci为第i个方向的梯度。
这里,m0为目标邻域灰度均值,mi为第i个方向的邻域灰度均值,目标局部梯度示意图如图4所示。
2)八邻域梯度标准差
对于典型弱小目标,8方向梯度大小具有一致性,理想情况下,8方向梯度大小相等;对于干扰杂波,由于其灰度分布具有一定随机性,8方向梯度一般差异较大。八邻域梯度标准差可以表征目标梯度的一致性特征。其定义如下:

其中,Sf为8方向梯度标准差,M为8方向梯度均值。
3)目标局部占空比
在小目标的局部图像内,目标区域灰度大于局部背景灰度,通过一定得阈值可以将背景和目标分割出来,分割后典型目标为圆斑状,目标面积在局部图像区域所占比率往往小于10%;而干扰杂波灰度分布较复杂,前景和背景无明显的灰度差异,分割后前景在局部区域内所占面积往往接近50%。
目标局部占空比定义如下:

其中,NI>thd为分割后目标面积;NLocal为局部总面积。

图5 典型目标和干扰的占空比对比
4)二阶矩
二阶矩表征目标像素点分布的紧凑度。典型小目标为点状,二阶矩比较小;而干扰杂波局部图像分割后形状具有不确定性,可能为条状或离散随机形状,二阶矩较大。
二阶矩表达式如式(8)所示。

其中,(xj,yj)为分割后非零像素坐标,(μx,μy)表示目标中心坐标。
5)圆形度
圆形度描述了目标的轮廓形状特性。在分割后的局部图像中,以目标中心八个方向上离中心距离最远的像素作为目标外轮廓点,对于典型目标,中心与8个轮廓点的距离相近,距离标准差小,圆形度高。
目标圆形度定义如下:
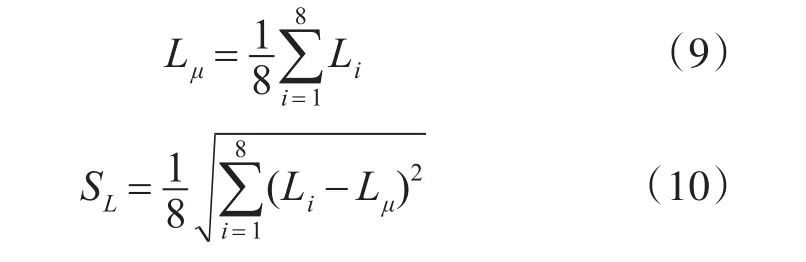
其中,Li,i∈{1,2,…,8}表示目标中心与外轮廓点的距离,SL为目标圆形度特征。

图6 目标和云边缘分圆形度示意图
3.3 SVM分类器
支持向量机(Support Vector Machine,SVM)是基于统计学习的机器学习法,通过求解一个满足分类要求的最优超平面[15]实现分类,该超平面在满足分类精度的同时,使得超平面两侧有最大的裕量。目标检测问题可以简化为一个二分类问题[16]。
要得到红外弱小目标与干扰杂波的分类超平面,则需要构建样本集如下:
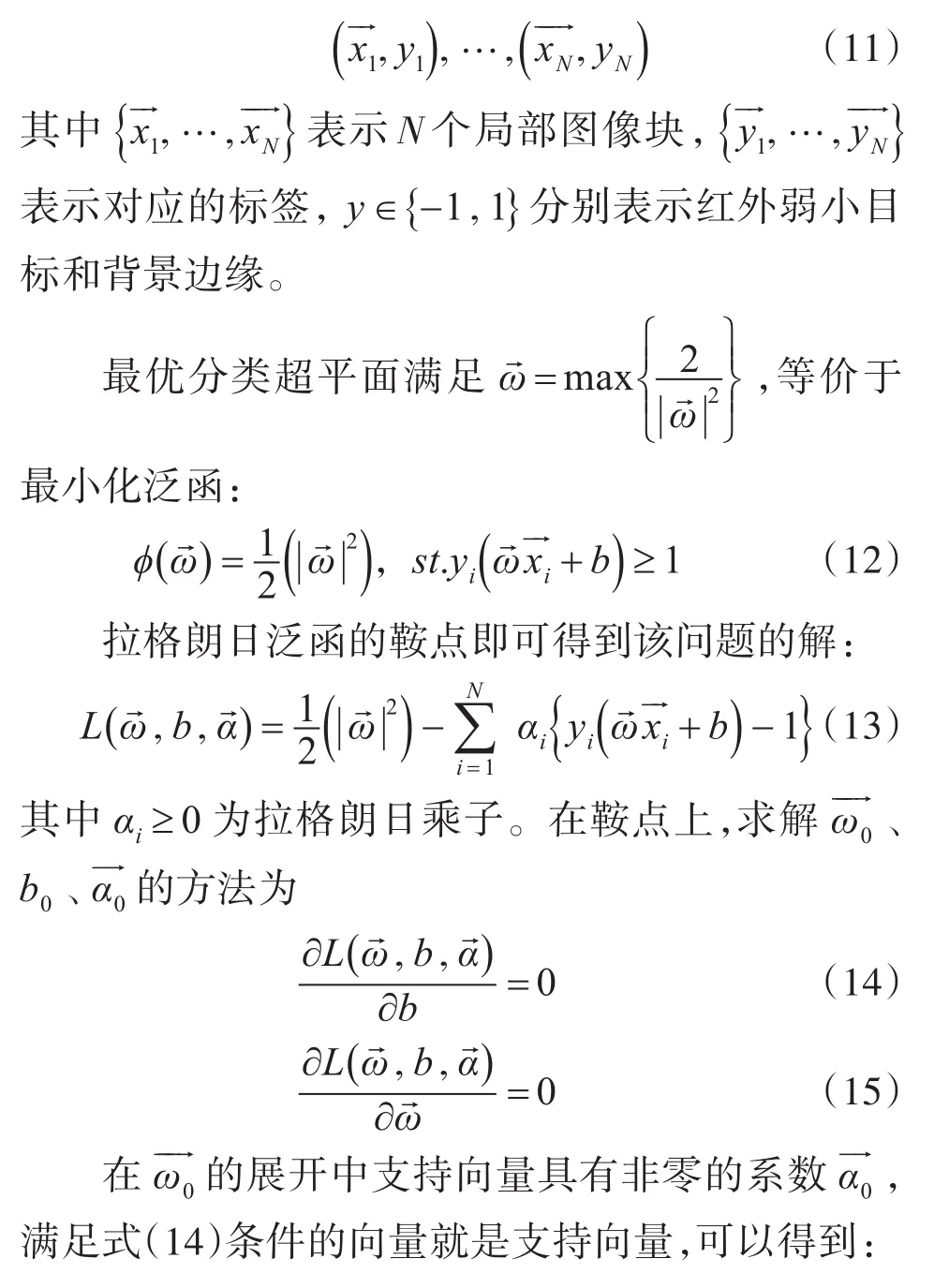

通过以上公式,可完成对样本集的分类超平面参数学习,从而获得红外弱小目标与背景边缘的分类超平面。
4 试验验证
为了验证本文算法有效性,利用红外搜索与跟踪设备采集了一定数量的红外图像数据,图像背景为天空云层背景和低空地物背景,目标为小型无人机和远距离民航飞机,人工标注了真实目标和干扰杂波图像样本。选用了820张为25×25像素的真实目标样本和1500张干扰杂波样本图像。计算训练图像样本的特征组合,利用的特征组合训练SVM分类器参数。测试过程中,准备1000帧包含小目标的天空、地空复杂背景的红外图像,真实目标经过人工标注,对本文算法和经典tophat算法分别进行测试。图7为目标和干扰杂波样本集。

图7 样本数据集
图8实线为本文算法检测概率和单帧平均虚警数量分布曲线,虚线为经典的tophat目标检测算法的分布曲线。由分布曲线可知,在同等检测概率条件下,本文算法的平均虚警数量显著低于经典tophat算法,说明该算法对杂波有很好的抑制效果;在同等的平均虚警数量条件下,本文算法的目标检测概率高于经典tophat算法,说明该算法具有很好的弱目标检测性能。

图8 算法检测概率和虚警率分布曲线
5 结语
针对红外弱小目标和杂波干扰的有效分类的难题,本文分析了典型红外小目标和干扰杂波的局部灰度分布特征差异性,设计了一组特征组合,并采用SVM分类器对被测目标特征组合进行分类,达到提取真实目标和剔除杂波干扰目的。试验结果表明,本文算法可以比较有效地实现复杂背景下红外弱小目标和杂波干扰的有效分类,具有一定的军事应用价值。
猜你喜欢
兵器装备工程学报(2022年8期)2022-09-13
九江学院学报(自然科学版)(2022年2期)2022-07-02
北京航空航天大学学报(2022年6期)2022-07-02
成都信息工程大学学报(2022年2期)2022-06-14
舰船电子工程(2022年1期)2022-02-12
集装箱化(2021年1期)2021-04-12
舰船电子对抗(2020年5期)2020-11-26
中国信息技术教育(2020年2期)2020-02-02
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
福建基础教育研究(2019年3期)2019-05-28
