
动态贝叶斯网络在空间目标威胁评估中的应用*
2021-06-04 04:11
舰船电子工程 2021年5期
(中国电子科技集团公司第二十八研究所 南京 210007)
1 引言
空间目标的意图分析与威胁评估作为空间目标监视系统的重要功能,尚没有辅助工具,目前完全依赖人工进行分析判断。系统保留的大量历史轨道数据和历史重大事件信息没有得到有效挖掘和利用,急需一套能够根据空间目标动态情报信息自动进行威胁评估的工具,辅助指挥人员分析决策。
空间目标威胁评估的核心在于如何利用信息融合中的低层次数据,结合高效的算法,在较高层次上对空间目标威胁度进行评估[1~2]。目前,对于空间目标的意图分析及威胁评估的研究尚处于初期阶段,多数为基于单一特征的威胁等级分析。
贝叶斯网络以概率模型和概率语言为推理依据,尤其适用于解决战场信息动态变化性问题。贝叶斯网络理论,基于积累的历史数据和专业知识进行建模,对多传感器、多来源的多维信源进行合成、自动分析,生成更有效、更精确的信息,并大大提高威胁评估自动化程度,能够极大满足用户的实际诉求,非常具有创新性和研究价值[3~6]。
传统的贝叶斯网络不能将时间因素对评估结果的影响反映到模型中去,由于战场信息的瞬息万变,本文考虑时间因素对事件的影响,通过动态贝叶斯网络建立威胁评估模型,根据专家知识和历史样本数据设置模型参数,最后通过空间目标威胁评估系统建模仿真,验证了方法的有效性。
2 动态贝叶斯网络概述
贝叶斯网络(SBN)是一种有向无环图,它表示了变量间的概率依赖关系[7]。领域变量用X={X1,X2,…Xm} 表示,变量的取值用x={x1,x2,…xm}表示,则贝叶斯网络的联合概率分布如下:

以静态贝叶斯网络为基础,动态贝叶斯网络(DBN)把静态的网络结构与时序信息相结合。假设其中的变化在离散时间点间发生,这些离散时间点通过非负数索引[8~9]。假定X={X1,X2,…Xn} 属性集随时间变化,X1[t]表示t时刻属性Xi的值,X[t]是随机变量Xi[t]的集合。为表示全过程中网络结构变化轨迹的度,在随机变量X[0]∪x[1]∪…上进行概率分布。此处假设在X中的整个变化过程满足马尔可夫链模型,即:

还假定整个过程是静态的,即:转移概率P(X[t+1]|X[t])与时间t无关。基于这两个假设,动态贝叶斯网络包括两部分。
1)先验网络B0,表示初始时态X[0]的分布;
2)转移网络B→,表示所有时间t上的转移概率P(X[t+1]|X[t])。
一个DBN是由在符合变量X[1],X[2],...X[∞]上的半无限网络结构(B0,B→)来定义的,实际应用时只需要在有限区间0,...T上推理即可。因此,动态贝叶斯网络在X[0],X[2],...X[t]上的联合概率分布为

其中P(X[t+1]|X[t])可从转换网络模型中求得。可以看出,动态贝叶斯网络通过对变量的不同特征间的依存关系建立数学模型,较好地反映了变量特征间的时序关系。
3 威胁评估模型构建
建立贝叶斯网络威胁评估模型包括建立模型结构和确定参数两个阶段。模型结构建立的目的是为了确定满足要求的网络拓扑结构,首先需要确定模型的节点,可以分析模型的目标和特征变量,其次需要分析节点之间的依赖关系;确定参数是为了根据历史样本数据来学习网络模型的参数,在确定参数后还需要逐步调整和优化,使其更接近真实状态。
3.1 特征变量提取
在空间目标威胁评估系统中,需要获得目标的多种属性,才能最终确定目标的威胁等级[10]。贝叶斯网络模型的关键是选取威胁评估属性集。
通过借鉴领域知识和专家知识,威胁因素中可选取的变量有威胁目标类型、成像分辨率、信号接收能力、载荷工作状态、目标位置[11~13]。各威胁因素的权重是不同的,为降低个别因素造成的评估结果的不确定性,需要对各威胁因素进行融合处理[14]。
3.2 确定网络拓扑
根据建立贝叶斯网络的方法,建立基于贝叶斯网络的威胁评估模型。图1是基于专家经验的空间目标威胁评估贝叶斯网络的先验模型。
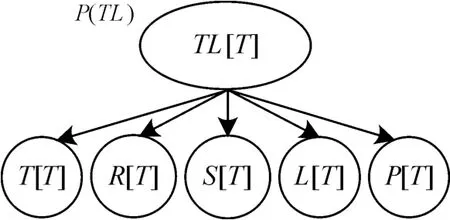
图1 贝叶斯网络的先验模型
其中T为威胁目标类型,R为成像分辨率,S为信号接收能力,L为载荷工作状态,P为目标位置。各变量的状态空间设计如下。
1)目标类型(T){侦察监视(T1)、气象测绘(T2)、导航定位(T3)、导弹预警(T4)、通信保障(T5)、其他(T6)};
2)成像分辨率(R){0~3m(R1)、3m~10m(R2)、10m以上(R3)};
3)信号接收能力(S){0~10dB(S1)、10~20dB(S2)、20dB以上(S3)};
4)载荷状态(L){工作正常(L1),故障(L2)};
5)目标位置(P){范围内(P1)、范围外(P2)};
6)威胁等级(TL){高(TL1),中(TL2),低(TL3)}。
动态贝叶斯网络模型则在先验模型的基础上,根据相邻时序间的变量构建因果关系,以反映变量之间的依存关系以及变量随时间变化的规律。图2为基于连续时序的贝叶斯网络威胁评估转移模型。
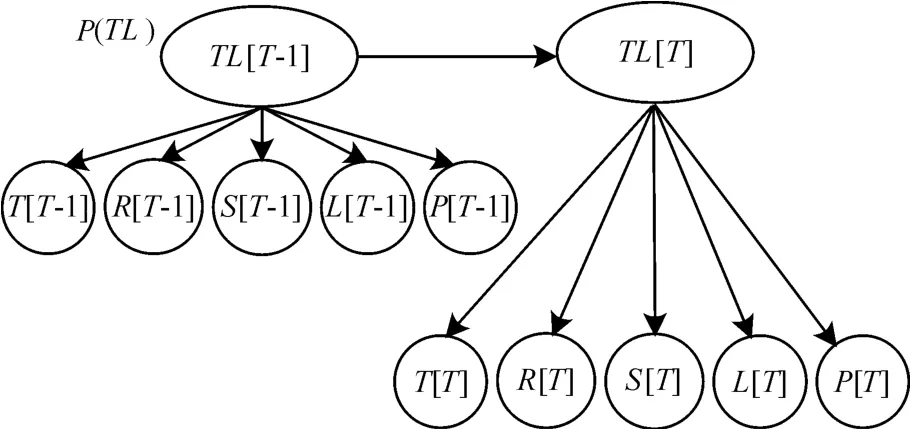
图2 贝叶斯网络的转移模型
3.3 条件概率矩阵
条件概率矩阵作为一种专家知识,反映的是专家对于关联节点间因果关系的认识。基于专家经验结合对历史样本数据的统计,由T、R、S、L、P推理TL的规则采用条件概率表描述如表1。

表1 条件概率矩阵
考虑条件概率矩阵的确定有一定的人为影响,可以通过反复调试样本数据的方法适度修正矩阵数据,以提高威胁评估的准确性。
4 威胁评估模型仿真
根据以上模型构建空间目标威胁评估系统,假设预先没有任何情报信息,根据历史数据统计出空间目标威胁等级的先验信息为P(TL)=(0.280,0.347,0.373)。系统完成初始化后,模型准备完毕。当我军情报系统探测到敌方空间目标的信息后,更新拓扑网络中的观测节点信息,并触发网络推理,完成模型中网络节点的概率分布的迭代,得到目标威胁程度的概率分布。
假设本次任务中的三个敌方空间目标为阿派司卫星5、长曲棍球5、空间跟踪与监视系统卫星(以下以目标1、目标2、目标3代替)。系统同时对这三个目标进行威胁评估。
对于目标1,在T-1时刻,假设传感器检测到目标类型为通信保障;下一时刻T,传感器检测到目标载荷状态为故障;T+1时刻,传感器检测到我方目标在目标1的探测范围内;对于目标2,在T-1时刻传感器检测到目标类型为侦察监视;下一时刻T传感器检测到目标的成像分辨率为3.11m;T+1时刻,传感器检测到目标载荷状态为故障;对于目标3,在T-1时刻,传感器检测到目标类型为导弹预警;T时刻,传感器检测到目标成像分辨率为2.13m;T+1时刻,传感器检测到目标信号接收能力为5dB。
根据以上信息运用动态贝叶斯网络推理,并和静态贝叶斯网络推理结果进行对比。
动态贝叶斯网络推理算法评估过程如图3所示。
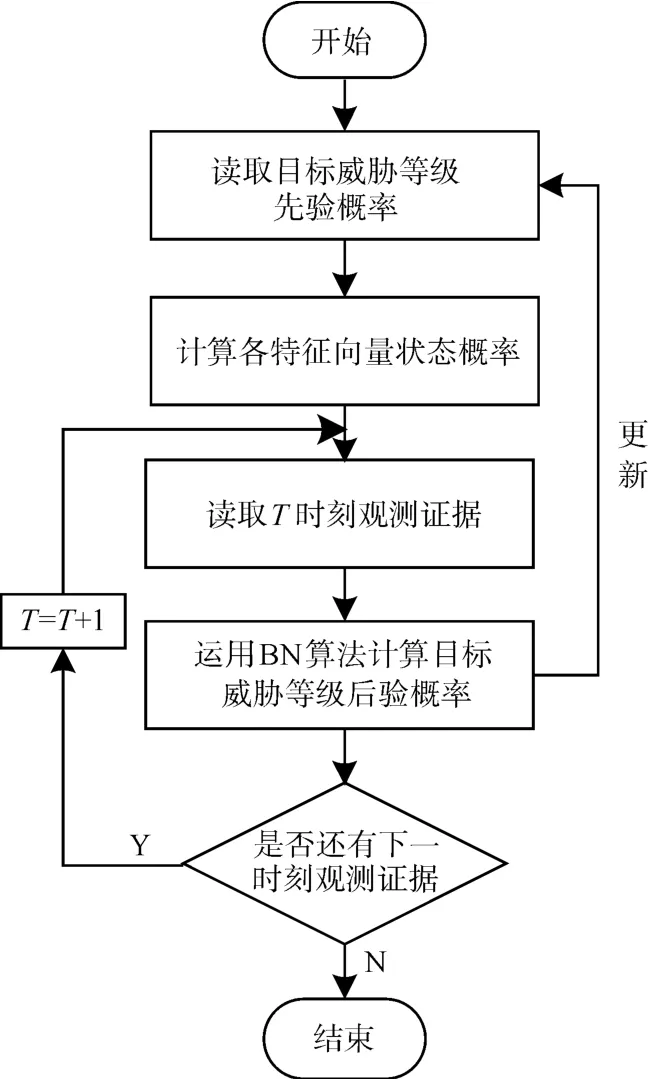
图3 DBN算法评估流程
目标在各时刻用静态贝叶斯网络推理得到的威胁程度概率分布如表2所示。

表2 SBN推理的威胁等级后验概率
用动态贝叶斯网络推理得到的威胁程度概率分布如表3所示。
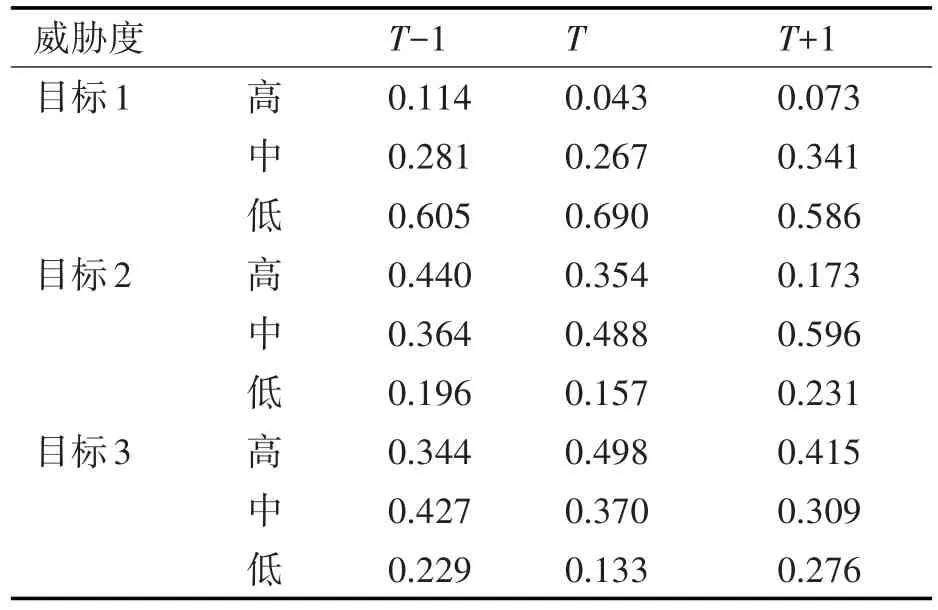
表3 DBN推理的威胁等级后验概率
5 仿真结果分析
根据以上两组仿真结果可知,先验信息的变化会导致不同的推理结果。以目标1为例,两组仿真结果的对比如图4所示。

图4 两组数据评估结果
在第一组仿真数据中,初始先验信息为P(TL)=(0.280,0.347,0.373),各威胁等级的概率分布相差不大而威胁等级为低的可能性最大,在T-1时刻评估结果为P(TL)=(0.114,0.281,0.605),T时 刻 评 估 结 果 为P(TL)=(0.124,0.383,0.494) ,T+1时刻的 评估结 果 为P(TL)=(0.385,0.358,0.257)。各时刻推理过程没有更新先验信息,推理过程是相互独立的,最终的概率分布相差不大,威胁程度为高的概率最大。
在第二组仿真数据中,在T-1时刻得到的评估结果为P(TL)=(0.114,0.281,0.605),这与第一组数据中T-1时刻的结果一样,因为它们的先验信息相同;在T时刻,先验信息更新为T-1时刻推理得到的信息,得到的评估结果为P(TL)=(0.043,0.267,0.690),进一步提高了威胁程度为低的概率,且降低了另两种概率值。在T+1时刻,得到的评估结果为P(TL)=(0.073,0.341,0.586),威胁程度为低的概率下降,另两种概率值提高,最终的评估结果仍然是威胁程度为低的概率最大。显然,当前评估结果受历史评估结果的影响显著,当前评估结果综合了最新的证据信息和历史信息,具有信息累积的特点。
综上,基于动态贝叶斯网络的空间目标威胁评估结果和人类专家的评估结果高度一致。该方法不但是一种有效的推理算法,也是一种可以有效应用人类知识的专家系统。
6 结语
动态贝叶斯的评估方法可以对上一时刻学习来的知识进行处理并保存,获得的证据和有效信息会随着时间的推移而聚积,推理结果的不确定性逐步降低,精确性也越来越高。需要指出的两点是:1)当系统产生大量新的样本数据后,通过对已有样本数据的再次统计,特征变量的分界值和网络模型的参数可以不断被调整优化,评估结果的准确性进一步提升。2)在对所有证据的评估完成后可能会出现威胁等级的概率分布相差不大的情况,如果该类数据过多会对后续的统计结果产生一定的偏差。可以通过增加新的特征变量以及进一步细化特征变量的分界来降低这种情况发生的概率。
猜你喜欢
中学生数理化(高中版.高考数学)(2022年3期)2022-04-26
中学生数理化(高中版.高考数学)(2022年3期)2022-04-26
中学生数理化·高三版(2021年3期)2021-05-14
中学生数理化·高三版(2021年3期)2021-05-14
电机与控制学报(2018年9期)2018-05-14
智富时代(2018年11期)2018-01-15
智富时代(2018年11期)2018-01-15
科教导刊·电子版(2017年32期)2018-01-09
考试周刊(2017年16期)2017-12-12
数学学习与研究(2017年10期)2017-06-22
