
基于自动控制原理的自适应调光百叶窗设计
2021-06-03 14:35杨莫寒姚可欣
科技创新与应用 2021年15期
杨莫寒,姚可欣
(东北林业大学,黑龙江 哈尔滨 150040)
1 百叶窗系统工程背景
传统上普遍使用的百叶窗采用手动控制调节光照强度,传感器控制的自动百叶窗系统,通过电力传动实现自动控制。系统采用光敏电阻对外界光照强度的变化进行感知,并以电压量的方式输出给比较元件,通过与标准电压进行比较,将得到的偏差量,通过电压放大器与功率放大器,使输出功率达到能驱动电机运转的电压等级,控制电机的正反转,从而控制百叶窗的开合,以调节室内的光线,不仅满足了人们的享受要求,也更加智能化。
2 自动控制系统工作原理
自适应调光百叶窗控制系统是通过光电传感器和实际光照强度的自动调节来实现百叶窗控制系统光照强度恒定的性能要求。系统工作原理图如图1 所示。
系统的工作过程如下:光电转换部分将实际光照强度由光电传感器转换为对应的电压值。光电转换部分期望光照强度由电压u1给定,并与实际光照强度u2比较得到光强差,即为光强偏差信号。偏差信号经电压、功率放大后,用以驱动伺服电动机,并通过传动机构拖动调压器传动触头。当光照强度偏高时,传动触头向减小电流的方向运动,反之加大电流,直到光强达到给定值为止。此时,偏差△u=0,电机停止转动。这样便可实现自动控制光照强度恒定的性能要求。
3 自动控制系统数学模型构建
3.1 电压放大电路传递函数
电压放大电路的电路原理图如图2 所示。
由电压放大电路图可得出输入电压和输出电压:
可得其传递函数为:

3.2 功率放大电路传递函数
功率放大电路如图3 所示。
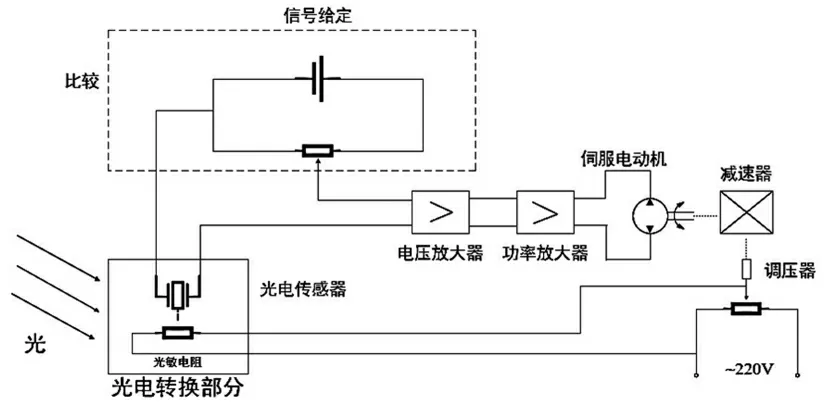
图1 光控自适应百叶窗控制系统的工作原理图
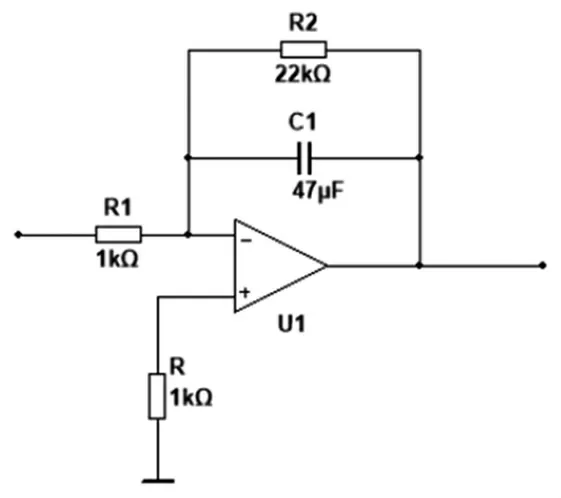
图2 电压放大电路的电路图
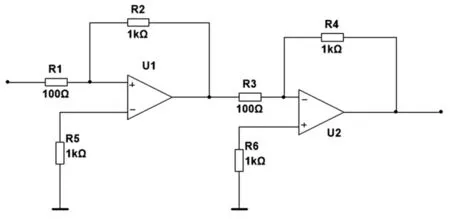
图3 功率放大电路
根据其输入输出电压关系,可得传递函数为:

3.3 直流电动机传递函数
直流电动机电路图如图4 所示。
电枢回路电压平衡方程:
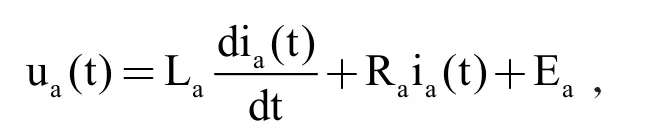
式中Ea是电枢旋转时产生的电势,其大小与励磁磁通成正比,方向一样电枢电压ua(t)相反。在工程应用中,电枢电路电感较小,通常忽略不计,因而采用公式计算:

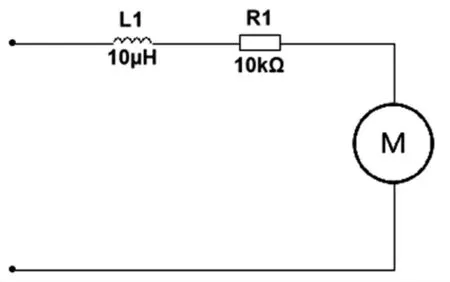
图4 直流电动机电路图
上面我们已经求得电枢控制直流电动机简化后的微分方程如公式:

式中Mc(t)可视为负载扰动转矩。根据线性系统的叠加原理,可分别求ua(t)到n(t)和Mc(t)到n(t)的传递函数,以便研究在ua(t)和Mc(t)分别作用下的电动机转速n(t)的性能,将它们叠加后,便是电动机转速的相应特性。由传递函数定义,于是有公式:

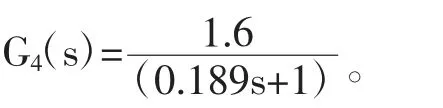
根据题目所给条件得到电机传递函数:
3.4 减速器传递函数
减速器对随动系统的工作有重大影响,减速器速比的选择和分配将影响到系统的惯性矩,并影响到快速性。
考虑到减速器的输入量为执行电机的转速n,其单位一般为r/min,而输出量应该为机械转角θm,若时间t以s 为单位,则
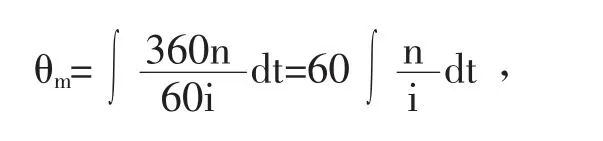
所以减速器的传递函数可表示为:
j 为减速器的传动比。
3.5 调压器传递函数
调压器为自耦变压器,其匝数比就是其传递函数,则
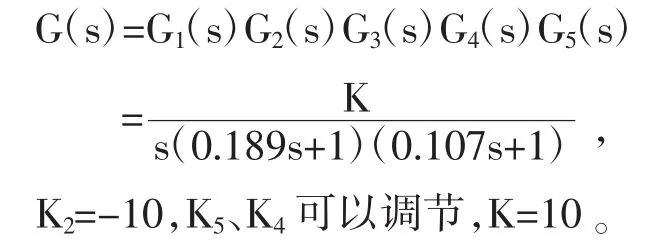
3.6 系统总传递函数
根据上述系统各部分的传递函数分析,系统传递函数为:
4 系统性能分析
4.1 稳定性分析
系统开环传递函数为:

为了确定能够使得系统稳定Ka的取值,列出劳斯表如下:
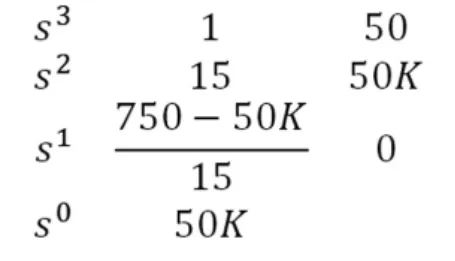
根据劳斯判据,系统如果想要稳定,要求第一列系数都为正数,故有:
求得Ka的取值范围为:0<K<15。
由此可见,当K=10 时,待校正系统是稳定的。
4.2 根轨迹分析法
由于忽略闭环极点则自适应光控百叶窗系统的开环传递函数为:
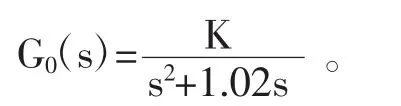
用MATLAB 来进行仿真绘制得到二阶系统根轨迹如图5 所示。
(1)稳定性能
从图5 可以看出,当根轨迹增益从零变化到无穷大时,所有的闭环极点不会越过虚轴进入到s 的右半平面,即当k>0 时,无论根轨迹增益k 为何值,闭环系统都是稳定的。
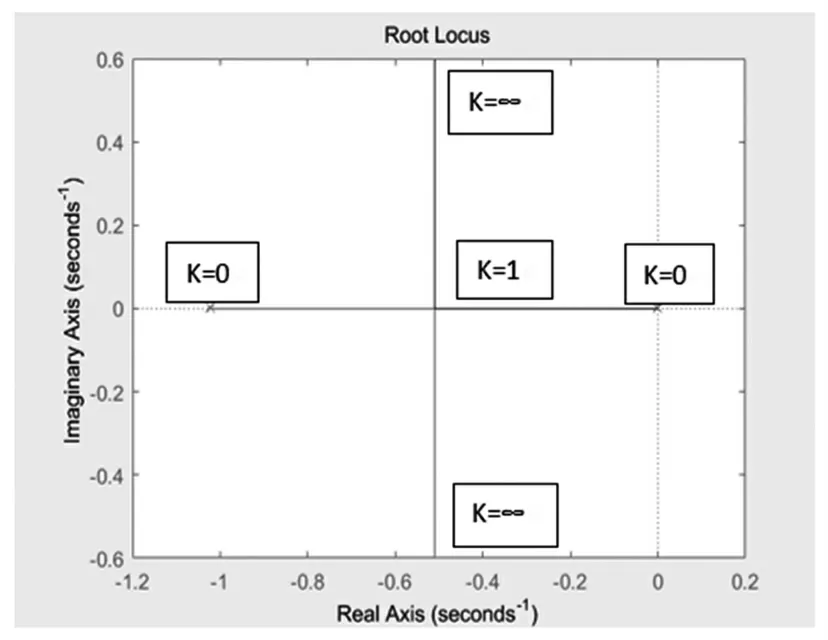
图5 二阶系统根轨迹
(2)稳态性能
由位于[s]平面坐标原点的开环极点个数可知系统的型别。由图5 可见,开环系统在坐标原点只有一个极点,所以系统为I 型系统,则由根轨迹图可以确定闭环极点位置的容许范围。
(3)动态性能
由图5 所示,当0<k<1 时,系统特征根为两个不相等的实根,此时系统处于过阻尼状态;当k=1 时,系统特征根为两个相等的实根,此时系统处于临界阻尼状态;当k>1 时,系统特征根为具有负实部的一对共轭复数根,此时系统处于欠阻尼状态。
4.3 系统频域分析法
已知系统开环传递函数为:

则系统的开环频率特性为:

其Bode 图如图6 所示。
相位裕度求取:
根据其伯德图,利用几何法求剪切频率ωc:
可求得剪切频率ωc=7.03rad/s,
则相位裕度γ=∠G(jω)cH(jω)c+180°,
代入剪切频率,则可得到γ=22°,
幅值裕度求:

根据正切公式,可求得相角穿越频率ωg=5.7rad/s 。
可得系统幅值裕度Kg=1.46。
由于γ=22°<45°,因此,对于相位裕量,系统不能达到预定要求,要进行校正。
引入串联无源超前网络对系统进行校正,此时系统的开环增益下降到原来的,通过提高放大器增益加以补偿,则可得超前校正装置的传递函数为:
选取期望裕度r*=45°,
根据期望的相位裕度确定φm=r*-r+△r=33,α=3.39。
对于校正装置则有:
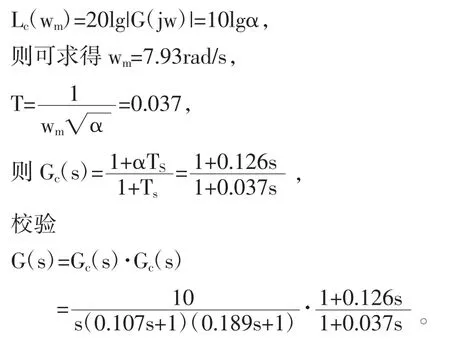
通过MATLAB 仿真可得伯德图如图7 所示。
由仿真可得其相位裕度变为180°-147°=33°,相比之前未校正系统得到了改进。
5 结束语
在本设计中,通过规律建模,得出了自适应光控百叶窗系统的传递函数,基于此传递函数使用MATLAB 及Simulink 动态仿真工具进行部分系统仿真与调试。使得系统性能更加优良。自适应光控百叶窗系统可以通过光线的明暗来自动控制百叶窗的开合,以调节室内的光线,不仅满足了人们的享受要求,也更加的智能化,在未来的发展中一定会广泛使用。
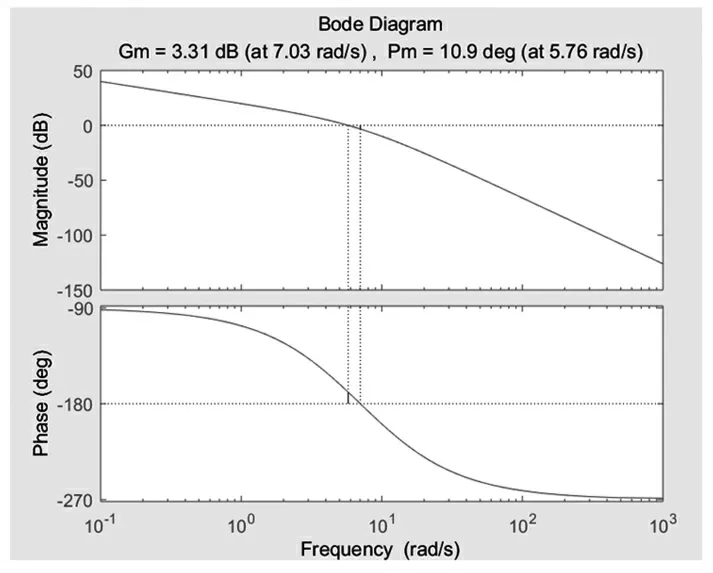
图6 系统伯德图
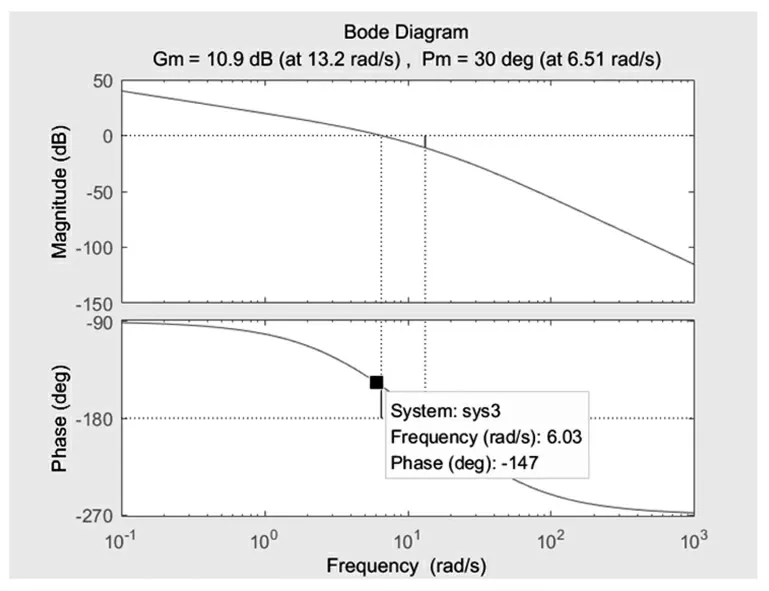
图7 校正后系统伯德图
猜你喜欢
电气电子教学学报(2022年3期)2022-07-30
电气电子教学学报(2022年3期)2022-07-30
燃料化学学报(2022年5期)2022-05-30
中国舰船研究(2022年1期)2022-03-19
新课程·上旬(2020年3期)2020-08-07
科学导报·科学工程与电力(2019年22期)2019-10-21
无线互联科技(2019年10期)2019-08-06
宇航总体技术(2018年5期)2018-10-15
中国建筑金属结构(2017年5期)2017-06-01
发明与创新·大科技(2017年5期)2017-05-16
