
钢轨扣件横向偏移特征检测算法研究
2021-06-01 11:25王恩鸿柴晓冬钟倩文李立明张乔木
城市轨道交通研究 2021年5期
王恩鸿 柴晓冬 钟倩文 李立明 张乔木
(上海工程技术大学城市轨道交通学院, 201620, 上海∥第一作者, 硕士研究生)
轨道检测是保障列车安全运行的重要手段,其中钢轨扣件检测是轨道检测的关键问题之一。目前较多使用人工检测的方式,存在效率低、不安全的缺点,虽然已经利用轨检车上线检测,但误检率仍然较高,存在一定的安全隐患。近年来,国内外专家对钢轨扣件检测问题进行了积极的探索,尤其对钢轨扣件检测算法进行了深入的研究。
文献[1]运用特定区域像素定位扣件区域,使用灰度特征和HOG(方向梯度直方图)特征描述特征向量,通过Chi开方距离分类器实现对ω型扣件的断裂检测,具有一定的有效性和可行性。文献[2]利用枕肩定位,提取PHOG(分层梯度方向直方图)特征和MSLBP(多尺度局部二值模型)特征加权融合,提取扣件宏观纹理特征,采用SVM(支持向量机)分类,对ω型扣件进行缺陷检测,定位特征不够显著,但鲁棒性强能够满足自动化检测。文献[3]利用SIFT(尺度不变特征变换)提取扣件图片特征,进行归一化为Fisher向量,使用Linlinear分类,能够实现对ω型扣件图像检测,具有较高的识别率及鲁棒性。
以上算法在扣件检测中定位方面受扣件的复杂背景环境影响较大,对于扣件的特征提取,文献[5]改进了LBP(局部二值模式)算法提取扣件的显著特征,利用模板匹配算法精确定位,以相邻两个扣件的差值判断实现自适应检测,LBP特征显著,有着很高的鲁棒性和适应性。文献[6]针对扣件存在形状变化、光照差异和异物遮挡的问题提出GMPM(高斯混合部件模型)算法,将归一化的HOG作为GMPM的底层特征,误检率低。
目前,通常运用深度学习算法对ω型弹条扣件的断裂、缺失等损坏状态进行识别,主要针对WJ-7、WJ-8类型扣件进行检测。本文针对无砟轨道中带绝缘帽的、分开式扣件Pandrol SFC型弹条扣件的偏移松动进行检测,目前Pandrol SFC弹条扣件主要应用于无砟轨道。因为Pandrol SFC的扣件具有安装成本低、使用寿命长的优势,所以在未来的铁路应用上有着很大的空间。本文算法不但对Pandrol DFC、Pandrol EF型弹条扣件的松动检测有很大的参考价值,而且对ω型的弹条扣件特征提取也具有一定的参考价值。
本文提出了针对无砟轨道Pandrol SFC型弹条扣件的松动算法。首先,进行图像滤波预处理,获得噪声影响相对较小的扣件图像;其次,对预处理图像进行背景分离,滤除图像中无效信息,获取并定位图像中的扣件区域,进行类二值强化,滤除图像中的杂波,获得突出的扣件背景分离后的图像;再次,为了精确计算扣件偏移量,采用连通性对扣件的图像进行轮廓特征提取;最后,通过轮廓特征精确定位扣件、两个螺母和两个紧扣垫的关键位置,连接形成四边形,对所取得的扣件4点的位置特征与安全状态下的扣件特征进行偏移量的计算,可得出扣件横向松动偏移量,从而判断扣件状态。
1 扣件横向偏移算法原理
图1给出了钢轨扣件横向偏移算法的流程图。通过降噪标准化处理,获得了噪声小、运算量少的标准图像;再通过聚类二值强化对扣件图像前景、背景进行分离,利用聚类算法进行扣件前景、背景分割二值强化,采用矩不变原理滤掉不相关特征,进行关键特征定位;最后通过关键四边形的位置关系计算扣件的横向偏移量。
1.1 图像标准化降噪
用线阵相机拍采集到的图像分辨率为4 096像素×2 048像素,与实际的扣件图像等比例。为了减少噪声干扰,对原始扣件图像进行灰度化和高斯滤波处理,效果如图2所示。
1.2 扣件图像背景分割原理
背景分割是对扣件图像特征提取和识别的基础。传统的图像分割方法有OTSU[7]法、分水岭法[8]、k-means[9]算法。传统的分割算法在突出扣件图像的特点与均匀分布图像的像素两个方面有较大劣势。OTSU算法易产生大量噪点,分水岭算法易产生过度分割的缺陷。为了分离扣件与背景,采用k-means聚类分析来衡量像素点之间的亲疏程度,实现像素的分割。

图1 钢轨扣件横向偏移算法流程框图

a) 线阵相机采集原图

b) 灰度化和高斯滤波处理效果图
k-means聚类算法是将像素按照一定的数据隶属度大小完成数据的归类划分,相似性高的像素划分一类,未被划分的相似度较低,对于k-means聚类算法具体描述如下。
图像的像素集合M聚合到k类中,产生以V={Vi}(i=1,2,…,k)为聚类中心的k类结果。通过迭代使得目标函数收敛,最终完成聚类和图像的分割,通过k-means算法将原始图像进行扣件前景和背景的分离,突出扣件和背景之间的明显差别,效果显著。三种背景分割算法的效果图如图3所示。
a) 标准降噪图 b) OTSU算法

c) 分水岭算法 d) k-means算法
针对扣件图像的特殊性,为了最大化保留扣件的特征,对扣件采用簇的数目大小为4的聚类方法,即将扣件图像分为4簇,以最少的簇产生最大的特征,并对聚类后的图像进行二值强化处理。将原来的4类像素通过阈值转化成为2类像素,由原来的三通道变为单通道的二值像素。
2 扣件横向偏移特征变换
2.1 扣件轮廓特征提取
2.1.1 轮廓提取
为了保证目标轮廓提取的完整性,采用最短路径的闭环搜寻方案,针对基于虚拟连接的显著图中的非闭合轮廓线获取最短路径。假设轮廓图像中存在Me个非闭合端点,任意的2个非闭合端点ep、eq之间的路径长度L(ep,eq),同两点间的欧式距离呈正相关关系,同连接ep呈负相关关系。因此,对两者进行归一化处理,取得L(ep,eq)的路径长度为:
(1)
通过反复迭代连接短路径的端点,可形成多个封闭环形轮廓线,能够有效地保证轮廓目标的完整性。图4为扣件轮廓提取效果图。

图4 扣件全局轮廓效果图
2.1.2 关键轮廓矩特征分离
根据Hu矩不变理论,通过提取矩特征可准确识别定位。用对曲线的积分代替区域的积分,则:
(2)
(3)
式中:
mp,q——Hu矩;
x——图像横坐标;
y——图像纵坐标;
C——图像中所有点。

(4)
φ1=μ2,0+μ0,2
φ2=(μ3,0+3μ1,2)2+(3μ1,2-μ0,3)2
φ3=(μ3,0-3μ1,2)2+(3μ1,2-μ0,3)2
φ4=(μ3,0-μ1,2)2+(μ2,1+μ0,3)2
(5)
获取安全状态下扣件的φ1、φ2、φ3、φ4、φ5、φ6、φ7,进行特征提取,并且获得4个关键轮廓的4个中心点坐标及标准安装的矩形度和扁形度:
s=a/b
(9)
e=ri/rc
(10)
式中:
s——提取轮廓的矩形度,越接近1则轮廓越接近方形,则轮廓越接近紧扣垫的轮廓;
a——轮廓的长;
b——轮廓的宽;
e——轮廓的扁形度;
ri——轮廓内切圆半径;
rc——轮廓外接圆的半径,越接近圆该轮廓越接近螺母轮廓。
第一层筛选:先对所有轮廓的中心坐标进行阈值筛选,以缩小非相关轮廓,减少计算量。
第三层定位与识别:矩特征如不变,将剩余轮廓特征值与标准安装不发生偏移的扣件进行对比,进行分类筛选。
利用层筛公式:
(11)
ω1+ω2+ω3+ω4+ω5+ω6+ω7=1
(12)
式中:
ω1—ω7——不同的权重参数。
图5为三层分离方法的效果图。

图5 扣件三层分离关键特征提取
通过以上方式获取关键特征轮廓,基于轮廓的中心坐标定位出扣件的4个关键轮廓、扣件的2个螺母轮廓和扣件的2个紧扣垫轮廓。
通过以上步骤,可获得扣件关键部分的轮廓特征属性,最终输出结果,如图6所示。图中:a2、b2、c2为经过4簇k-means聚类二值化效果;a3、b3、c3为扣件轮廓特征提取算法效果;a4、b4、c4为经过扣件特征提取后对扣件关键轮廓特征提取效果;a2、a3、a4为扣件发生向左的偏移结果;b2、b3、b4为安全状态下的扣件的效果图;c2、c3、c4为扣件发生向右偏移的效果。
由此,为有效识别高质量发展背景下政府引导基金的发展路径,本文首先在案例讨论的基础上对新兴产业的融资需求特征进行讨论,进一步对现有政府引导基金的主要运作模式进行讨论,分别探讨每种模式在新兴产业融资过程中的适用性,最后对政府引导基金推动新兴产业发展的具体方式进行展望,并提出政策性建议。



图6 扣件关键特征提取效果图
2.2 扣件偏移量提取
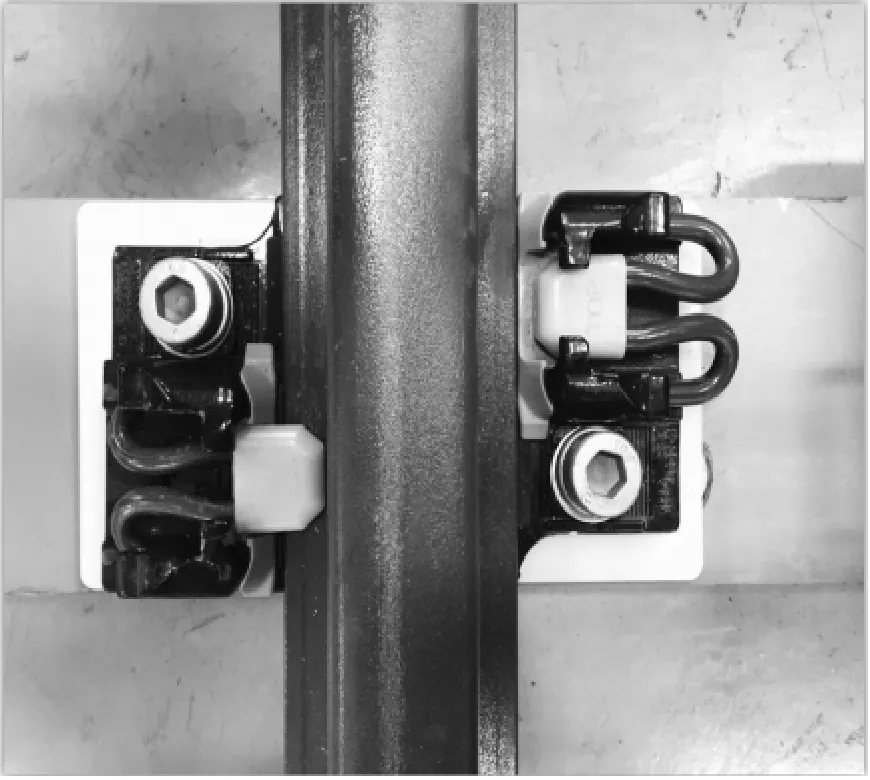
根据扣件的安装标准,得到在安全状态下扣件上部的螺母关键轮廓和扣件紧扣垫轮廓,以及扣件下部的关键螺母与紧扣垫轮廓的中心坐标首尾连接起来的平行四边形,如图7所示。

图7 扣件关键轮廓特征示意图
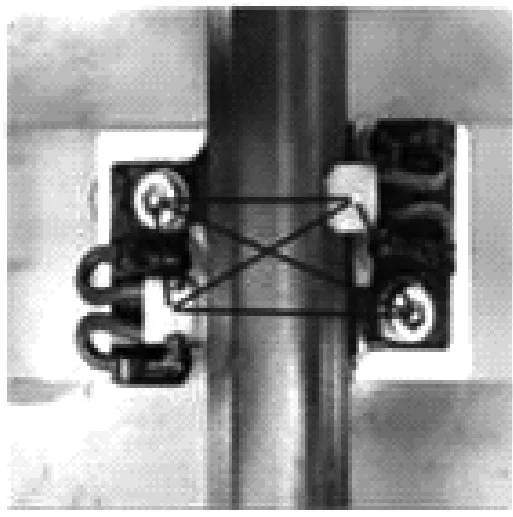
在实际扣件图像中,当检测的目标扣件发生带旋转的横向偏移时,如图8所示,将A(上部螺母轮廓中心)、B(上部紧扣垫轮廓中心)、C(下部螺母轮廓中心)、D(下部紧扣垫轮廓中心)首尾相连得到扣件关键四边形ABCD。当扣件发生横向偏移、带旋转的横向偏移时,通过关键特征提取能提取到扣件轮廓的关键特征,从而形成关键四边形。当扣件不发生横向偏移时,扣件关键四边形为平行四边形;当发生偏移时关键点产生位移时,使四边形发生形变。通过对比采集图像提取关键四边形与扣件在安全状态下的图像提取的平行四边形比值,可计算扣件的横向偏移量。

图8 扣件带旋转的横向偏移示意图
计算扣件四边形ABCD的面积如下:
SABCD=SABD+SBCD
(13)
通过以上计算可获得SABCD面积,计算偏移量为:
(16)
式中:
SA1B1C1D1——采集扣件的图像面积;
SABCD——安全状态下扣件轮廓特征面积。
在图像中,可通过测得上部偏移量AB为α、CD为β,来验证偏移量的准确性,并且可对扣件的偏移量进行精准校验。图9为偏移面积的效果图。图9中,a5为扣件发生向左偏移的4个关键位置形成的平行四边形效果图,b5为安全状态4个关键位置形成平行四边形效果图,c5为扣件发生向右的横向偏移效果图。
扣件横向偏移效果图

(b5)

(c5)
3 结果验证与分析
3.1 扣件横向偏移算法试验
为了对算法进行验证,采用线阵相机试验台采集到1 000张扣件图像。试验环境是在Windows下运用OpenCV计算机视觉库,采用C++语言在Visual Studio 2015环境下实现的。
本次试验体现了扣件横向偏移算法对扣件是否发生横向偏移的准确性与快速性。将1 000张试验图片进行处理。其中:150张扣件左边发生偏移(30张为带旋转的横向偏移);另外150张扣件向右发生偏移(其中30张是带旋转的横向偏移);剩余700张处于安全状态。将此1 000张图片用本文算法计算的结果如表1所示。

表1 扣件图像偏移量表
表1中:λ为横向偏移算法计算得到的偏移量;α与β是计算出的上部偏移量和下部偏移量,并且可以验证扣件的横向偏移的准确性。
3.2 试验结果分析
根据Pandrol SFC型弹条扣件的安装技术标准,可得到Pandrol SFC型弹条扣件安全状态下的参数,如表2所示。

表2 Pandrol SFC弹条扣件安全参数标准表
由表2弹条扣件安全状态下的参数,与采集到的1 000张图片试验结果进行对比,检测出发生偏移的扣件结果如表3所示。

表3 扣件横向偏移算法检测结果表
经过试验可验证算法的可靠性,通过对比设置试验的表格可以看出,算法的可靠性达到98%。在试验的结果中,2个扣件向左横向偏移未检出,3个向右横向偏移未检出,原因为量值较小。在试验的同时,记录算法特征提取部分所消耗的时间,并与OTSU特征提取算法和分水岭特征提取算法进行对比,经过试验证明,采用本文算法比OTSU特征提取处理算法速度提升了16%。
4 结论
本文提出了一种针对Pandrol SFC型弹条扣件脱离安全位置问题的横向偏移计算方法。首先,利用图像降噪标准化得到图像,进行聚类二值强化和边界分割提取;其次,对处理后的图像进行图像轮廓提取,运用矩不变原理和安全扣件属性对轮廓进行筛选,获得关键轮廓并且定位出2个螺母和紧扣垫;最后,对比计算扣件关键四边形的面积计算偏移量。本文提出了一种新型的检测扣件是否发生横向偏移的方法,识别精度能达到98%,特征提取的速度相对于传统特征提取算法提高了16%,对于目前扣件横向松动的检测具有一定的应用价值。
猜你喜欢
地理空间信息(2022年3期)2022-04-01
大众文艺(2021年15期)2021-08-25
铁道建筑技术(2020年11期)2020-05-22
流行色(2020年2期)2020-04-28
流行色(2019年11期)2020-01-09
流行色(2019年11期)2020-01-09
西南交通大学学报(2018年5期)2018-11-08
制造技术与机床(2017年7期)2018-01-19
测绘工程(2017年3期)2017-12-22
西安建筑科技大学学报(自然科学版)(2016年5期)2016-11-10
