
移动三维激光扫描系统在地铁盾构隧道管片椭圆度检测中的应用
2021-05-29 03:06盛方剑
智能建筑与智慧城市 2021年5期
盛方剑
(中铁第六勘察设计院集团有限公司)
1 引言
在南京地铁土建施工完成以后,地铁区间盾构隧道附近不可避免的会有改建商业街、修建道路等需要开挖基坑的施工,在开挖基坑的过程中加大了地铁隧道衬砌结构的受力,从而发生掉块、开裂、渗漏水等病害现象[1]。
盾构隧道管片根据综合系统设计要求应该是圆形,但是因为盾构隧道管片在生产加工、拼接安装等过程里,会产生一定误差,一般都是使用椭圆度这一参数来表示这种偏差,椭圆度过大时常伴有管片开裂、掉块、渗漏水等表观病害现象,但无法判断这些表观病害现象的盾构隧道衬砌结构具体的结构安全状态或者受力情况,这就加大了测试工作的困难程度。
本次研究分析里,详细论述了自由移动型三维立体激光自动扫描体系获得隧道点云数据的原理以及地铁盾构隧道变形分析中常用来分析椭圆度的方法,又结合南京市实际地铁安全保护区结构设施普查项目,使用徕卡SiTrack:One自由移动型三维立体激光自动扫描体系,针对这类应用模式展开了论证。最终结果说明,相较于旧有传统类型的椭圆度测试模式,自由移动型三维立体激光自动扫描系统来检测隧道椭圆度的方法比传统的椭圆度检测方法更具高精度、高效率、人为干涉少的优势,在未来南京市地铁的发展过程里,具备良好的使用发展前景。
2 移动式三维激光扫描系统
移动三维立体激光自动扫描体系是以三维立体激光自动扫描仪为感应设备,和搭载应用平台、同步操控管理体系、准确定位定姿体系集中在移动应用平台上,给移动应用平台持续供应具体位置数据信息,与此同时获得三维空间数据的系统。本次研究分析运用的是徕卡Si-Track:One自由移动型三维立体激光自动扫描体系,这个体系通常包括:三维立体激光自动扫描仪和轨检小车两大组成部分。轨检小车上集中了里程数计、倾斜感应设备、激光距离测量感应设备及用于操作控制的电脑计算机。小车在运行轨道上不断前行的时候,扫描仪获取隧道断面的表观形态与反射率;里程计连续记录小车前进里程;倾斜仪测量轨面超高;各传感器同步采集各种测量参数,电脑计算机自动接收保存由感应设备自动返回的数据信息,并且在这个体系上同步各感应设备的有效时间。该系统内部将高精度惯性导航单元与非接触式激光里程计整合在一起,确保GNSS信号完全失锁时,也可以持续获取高精度的定位信息。
扫描轨检小车前进时,会发生车身姿态的变化,扫描仪与小车因为相对位置固定,所以自动扫描仪姿态随着小车的姿态一起改变。由于自动扫描仪的具体位置和姿态在迅速改变,因此自动扫描仪分布坐标系的分布坐标处理点云数据,需把获取到的点云数据进行坐标交换到同一分布坐标系里[2],如图1所示,也就是自动扫描轨检小车的分布坐标系。

图1 自动扫描小车分布坐标系
3 椭圆度检测
隧道的管片按设计要求为圆形,但因管片在加工、输运、拼装及使用过程中都会存在一定偏差,若偏差太大,则会严重阻碍管片的正常运用,更有甚者会引起公共道路交通意外事故,因此,运用椭圆度对管片的不圆程度进行量化。该参数可以对地铁盾构管片的总体弯曲变形实际状况,展开定量研究分析。隧道盾构法项目施工综合系统设计、检测验收的有关标准规范对该参数也有具体规定。运算这个系数的核心关键是运算盾构管片的椭圆长半轴与短半轴,参考依据盾构法施工与验收规范[3],圆形隧道管片在衬砌安装之后,隧道的最大有效直径和最低有效直径的有效差值,和隧道实际有效内径设计数值的比重,采用千分比代表,也就是:

式中:T为椭圆度;a为椭圆长半轴;b为椭圆短半轴;D为隧道内径设计值。
全站仪断面测量法、吊铅锤法和激光断面仪法是检测隧道椭圆度常用方法。全站仪断面测量法是指在隧道中线上架设整平全站仪,输入棱镜高、仪器高、测站点坐标、后视点坐标等信息,再进行后视。之后,转换全站仪的无棱镜测量确定方式,促使全站仪根据设立应用程序依次断面自动扫描测量确定[4],再经过断面点分布坐标运算盾构管片椭圆度。吊铅锤法是指通过皮卷尺和吊铅锤结合测得盾构管片的长短轴,再运算盾构管片椭圆度。激光断面仪法是成立在激光距离测量专业技术和精密数据测角专业技术上,将极分布坐标测量确定模式与电脑计算机视觉感官专业技术集合在一起,再结合有经验的计算机操作控制与图像全面处理操作应用软件,获得盾构管片的内部轮廓线[5],之后运算隧道椭圆度。国内各大型城市的地铁运行维护压力,伴随着地铁建设发展速率的加快而愈发增大,旧有传统类型的椭圆度测试模式作业工作效率低,没有办法符合需要。经过多年的专业技术发展进步,移动三维立体激光自动扫描专业技术促使盾构隧道管片的椭圆度测试工作,转变得更为便捷、高效、可靠,是未来地铁运营管理维护保障专业技术的主流发展进步朝向。
4 应用案例
南京市某地铁线运营管理时期,项目工程工作人员使用夜间地铁停运时间分布段对这个连接线路区间左线K17+238~K17+478里程段的盾构隧道区间进行了移动式三维激光扫描,扫描轨检小车前进速度大约保持在1 m/s。获得的隧道点云数据信息,不仅能够应用在地铁运营管理弯曲变形实时监测,也能够作为历史数据信息储存,应用在后期新发地铁安全保护区隧道变形监测的初始对比数据。
该盾构区间全长240m,扫描作业里程段内对应管片865环~1065环,对该区段进行椭圆度检测。对获取的点云数据信息展开了预先处理、里程数匹配对应、选取组成结构中心对称线、选取断面、自动导出椭圆度表等处理。每隔1.2m提取一个断面,每个断面点云厚度为2m,共计提取200个断面。
该区间采集的点云数量共2.7亿。
把里程数作为横分布坐标,将椭圆度作为纵分布坐标,统计分析这个作业分布区段椭圆度柱状统计图,如图2所示。
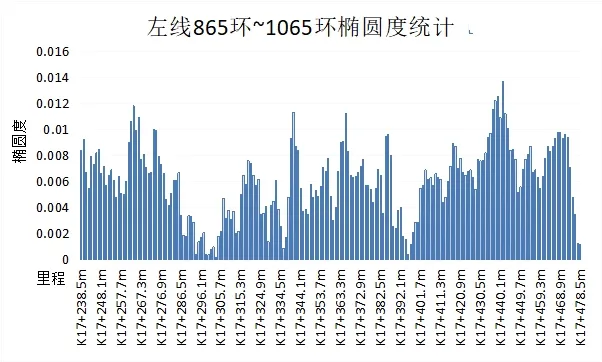
图2 椭圆度统计图
依据规范,地铁盾构隧道验收时成型的衬砌结构椭圆度应≤6‰[3]。里程为K17+332.1m、K17+339.3m、K17+340.5、K17+341.7m、K17+342.9m的五个断面椭圆度均大于6‰,分别为6.1‰、9.3‰、11.3‰、8.7‰、8.4‰。
通过运算方法将每一个断面模拟出椭圆度图,在其中,K17+380.1里程数处断面的椭圆度图,如图3所示。

图3 某断面的椭圆度分析
5 结语
根据南京市实际地铁安全保护区结构设施普查项目,应用徕卡Si-Track One自由移动型三维立体激光自动扫描体系获得隧道点云数据信息,经过操作应用软件,全面处理点云数据信息测试椭圆度。最终结果说明,自由移动型三维立体激光自动扫描小车具备准确度高、工作效率高等优势,在未来地铁迅速发展进步的态势下,具备很大的使用发展前景。本次研究分析里,仅仅探索讨论了自由移动型三维立体激光自动扫描体系在盾构隧道椭圆度测试中的检测效率与检测可行性,今后还须利用该方法对椭圆度检测的精度进行进一步对比验证。
猜你喜欢
数学杂志(2022年5期)2022-12-02
中学生数理化(高中版.高二数学)(2021年12期)2021-04-26
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
城市建设理论研究(电子版)(2019年9期)2019-09-16
铁道建筑技术(2019年5期)2019-09-14
中学数学杂志(2019年1期)2019-04-03
城市建设理论研究(电子版)(2019年1期)2019-02-19
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
