
地基LiDAR技术在活动断层三维场景建模中的关键技术与应用*
2021-05-26 09:26:18谭毅滢魏拾其宋健洪张冬丽郑文俊
中山大学学报(自然科学版)(中英文) 2021年3期
谭毅滢,魏拾其,宋健洪,张冬丽,郑文俊
1. 中山大学地球科学与工程学院/广东省地球动力作用与地质灾害重点实验室,广东珠海519082
2. 南方海洋科学与工程广东省实验室(珠海),广东珠海519082
激光雷达扫描系统(Light detection and ranging,LiDAR)是一种新兴的三维测量技术,具有快速、简便、高精度、高分辨率的特点,系统工作的原理是通过内部集成的测时测角系统记录激光脉冲来回物体表面的时间与角度,依据激光测距原理得到物体表面各点的三维坐标[1],其技术目前已经应用于不同行业领域,近年来也逐渐应用于地学高精度研究的三维模型建立和信息获取[1-4]。
根据扫描目标大小、获取信息目的、扫描区工作条件及对空间分辨率要求,LiDAR 可以搭载在不同的平台上工作,如星载、机载、地基、车载、手持等[1-2]。空间技术和航空技术的快速发展为LiDAR 技术的发展提供了高效的搭载平台,目前国内外对星载和机载LiDAR 的应用已经十分广泛,但星载和机载LiDAR 由于搭载平台、成本等的限制,在对具体工程场地或局部区域数据的获取中不能很好地发挥作用,而地基LiDAR 平台虽然对场地通视条件等有更高的要求,但对具体场地的建模和数据获取有其独到的优势,可以做到无死角、低成本等。近年来地基LiDAR 技术在活动构造[3-4]、建筑物提取、农作物评估[5]、森林调查[6]等方向的应用表明其可以在具体场景建设中发挥潜力。如在活动构造领域中,高精度地形地貌数据的获取是定量研究的基础,以前多使用经纬仪、全站仪、差分GPS 等对地形进行测绘,不仅费时费力、效率较低,而且易出现人为误差,不能做到地形地貌的全覆盖。近年来发展的摄影测量方法虽然能够高效获取地表数据,但其数据质量受到作业时的大气条件和光照条件等因素影响较大[7-8],另外,利用合成孔径雷达干涉测量(InSAR)技术也能获取高精度的地形地貌数据,但其数据处理技术暂未成熟,而且测量成本较高[8]。而地基LiDAR 具有空间分辨率高和能够穿透植被直接获取地面信息等的优势和特点,能够高效地获取真实的高精度地面三维信息。此外,在工程测量领域,地基LiDAR 也能简便、快速地获取工程的三维信息,为工程的后续计算与分析提供准确的数据,与地形地貌测量相结合,还能为工程的地质灾害风险评估提供基础数据和依据。
本文首先利用地基LiDAR 技术方法,在获取不同场地三维点云数据信息的基础上,从现场控制、数据处理及三维建模等方面介绍了地基LiDAR 数据应用过程中关键技术方法和流程,并以所选取的不同断层发育场地点位置的特殊条件为基础,建立了断错地貌模型、工程场地与活动断层交汇三维模型,展示了地基LiDAR 技术的优势和应用潜力。
1 地基LiDAR数据处理概述
地基LiDAR 是一种主动探测手段,主要工作原理为激光测距原理[2]。在扫描过程中,仪器通过测量从发射激光束到物体表面后被反射回来的时间,计算出物体表面的激光反射点到仪器的距离,再根据测角结果得到反射点在仪器坐标系下的三维坐标数据[2-3]。由于激光束有一定的强度,对植被有一定的穿透力,因此在扫描植被覆盖区时,一束激光束会在经过植被时形成多次反射,在回波中形成多个反射波峰,据此可以去除部分植被并得到真实地面信息(图1)。本文中使用的是奥地利RIEGL 公司的3D Terrestrial Laser Scanner VZ-2000i 进行数据获取,其分辨率达到1 mm(100 m 处),精度达到3 mm(100 m 处),使用配套的RISCAN PRO 进行点云数据的处理,使用3Dreshaper进行三维模型的建立,使用ArcGIS进行数字高程模型(DEM)的建立。
1.1 点云的初步处理
由于在野外扫描的过程中,激光不仅在到达地面、植被或建筑时会被反射,空气中的悬浮尘埃颗粒等也会反射激光,形成一个或一团悬浮点。因此,原始的LiDAR 点云包括了直接从地面、被测物体上等反射回的一次反射点,也有从植被反射回的多次反射点,另外还有因随机误差产生的噪声点和从空气尘埃反射回的悬浮点或称离群点[9]。为了获得从地面或被测物体上反射回的点云信息,需要把尘埃、植被等反射形成的悬浮点去除,这可以通过点云的去噪和滤波操作完成。另外,为了获得物体三维全方位的信息,往往需要围绕扫描区布设多个站点,每个站点获取与相邻站点有重叠部分的点云数据,因此,把多站点的点云数据拼接起来也是点云处理的重要部分。
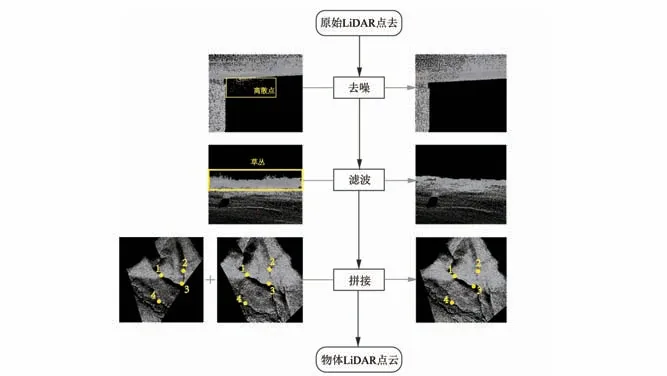
图1 地基LiDAR点云处理流程图Fig.1 Terrestrial LiDAR point clouds′processing workflow
点云去噪的目的是去除噪声点和离群点[10]。去除悬浮点云的方法有很多。对于扫描面积较小、视野空旷开阔的点云数据,可以采用手动去除的方法;对于扫描面积较大或点云结构复杂的数据,则可采用如直通滤波、半径滤波等多种算法对点云进行去噪处理。滤波过后,还需要进行检查,以保证无噪声点和离群点去除的遗漏。
点云滤波的目的是获取地面点,即分离地面、植被和建筑物等。由于植被能够形成多次反射点,因此保留最后一个反射点的操作能够初步分离地面点与植被点,但完全把植被、建筑和地面分离,需要更加精细的处理。有关点云滤波的算法研究很多,如移动曲面滤波算法[11]、迭代最小二乘滤波算法[12]、渐进加密的三角网滤波算法[13]等。在本次实验和数据处理过程中,将使用渐进加密的三角网滤波方法来分离植被与地面。渐进加密的三角网滤波方法的原理是植被与建筑等常高于地面,其点云与地面点云往往存在一定的高度差,并且在剖面上其高程值从地面点到植被、建筑点存在突变的过程。因而此方法在平面上均匀提取点云的较低点作为种子点来建立不规则三角网(Triangulated Irregular Network, TIN),即初设地面,通过比较非种子点到临近三角网格的距离和非种子点到种子点的角度判断该点是否属于地面点,并据此不断更新、扩大种子点数来加密TIN 以逼近真实地面,最终使得所有地面点作为种子点参与TIN,而植被、建筑点则仍是非种子点,二者得以区分(图2)。
渐进加密的三角网滤波方法已经发展较为成熟,集成于多种点云处理软件中。它通过迭代加密TIN 得到地面点,对曲面不连续性较为敏感[12]。应用时,通过调整判别参数可以对需要滤去的地物点或植被的大小进行控制,进而应用于其他环境中。
点云拼接是把不同站点的扫描数据在同一坐标系下拼接起来,点云拼接的方法很多,主要分为基于标靶的拼接、几何特征的拼接、控制点三维坐标的拼接和临近迭代配准(Iterative Closest Points, ICP)算法的拼接[2,14]。本实验采用基于几何特征的拼接与改进ICP 算法相结合的拼接方法,有效地提高了拼接精度。基于几何特征的拼接方法是通过点云中目视容易辨认的几何特征来确定点云重叠部分中的同名点,然后再基于同名点计算点云的变换矩阵进行拼接,其误差常因人为原因而较大。而ICP 算法则是在于参考点云与目标点云上取得一定数量同名点的基础上,不断调整变换矩阵直至两点云的同名点间的距离平方之和达到规定阈值之下来进行拼接[15-16],其误差相对较小(图3),许多改进ICP算法着眼于正确的同名点的提取。本实验所采用的改进ICP 算法通过计算一定大小立方体内所有点的最佳拟合平面的重心与法向量,以此作为参考量,提取相似的最佳拟合平面对作为同名点。由于法向量能够更好地保留点云表面的细微几何特征,因此一般对应点正确率较高[16]。
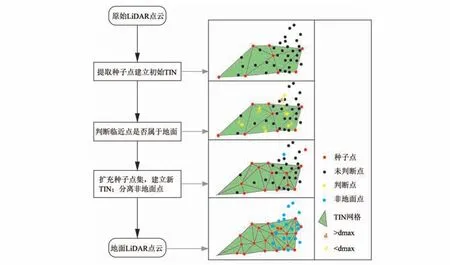
图2 渐进加密的三角网滤波方法原理Fig.2 The principle of progressive encryption triangulation method
另外,采用几何特征与改进ICP 算法的拼接相结合的拼接方法,能够人机交互地对拼接的准确度进行控制,有效地提高了匹配的精度,尤其适用于表面崎岖不平的三维实体。
1.2 三维模型重建方法
经过处理的三维点云虽然也可以展示物体的三维形态,但仍不是真实世界中的三维显示效果,而且其离散的数据组织形式对后续分析和计算带来很大的不便,因此需要利用三维点云建立三维模型,获得连续的数据结构以及更直观、准确的可视化效果[17-18]。
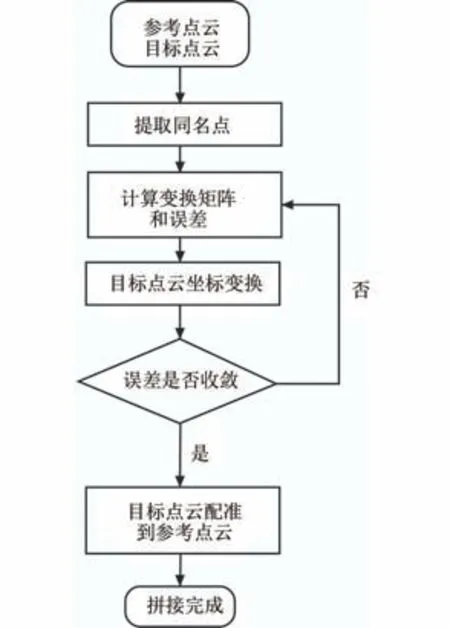
图3 ICP算法流程图(修改自文献[15])Fig.3 Model of ICP algorithm
对不规则的三维实体如地质体、地貌面等建立三维模型的典型方法有三维规则网格法、TIN 不规则三角网法和四面体法等[17-18]。由于地基LiDAR获得的点云都是三维实体的表面点,不包含实体的内部点,因此多利用TIN 不规则三角网法对点云数据进行处理并建立三维模型[18-20],TIN 不规则三角网法通过点云中各个点为节点建立三角形以形成表面模型。TIN 多使用Delaunay 三角划分算法,所生成的Delaunay 三角网具有唯一性,且各线段不相交,能够很好地描述三维点云所代表的表面。另外,由于三维点云可能有因扫描缺失和扫描不到而形成空洞的地方,因此需要利用空洞周围的点云对空洞进行插值填补以后再进行TIN 网的建立。空洞的插值方法有很多,需要根据空洞的可能形态进行选择。
对规则的三维实体如建筑、桥梁等,可以在计算相应的尺寸后使用规则曲面来描述。如对桥梁的圆柱形桥墩,可以通过点云上不共线的三个点拟合圆柱的直径以及长轴,建立规则圆柱面;对建筑外墙平面,可以通过点云上不共线的三个点拟合平面的倾向和倾角,建立平面等。规则曲面的建立能够减少数据量,更精确地填补点云空洞,但规则曲面间以及规则曲面和不规则曲面间的拓扑关系需要仔细识别及建立。
活动断层作为一种重要的地质构造类型,对构造运动研究、地震发生机理探讨和工程安全评价等都有重要的意义,因此活动断层模型构建对工程的安全风险分析有很大的帮助。断层是面状地质体,在局部地区可以用一个平面近似表示,其产状可以在现场实测得到,也可以通过点云性质进行测量获得。使用点云性质进行断层产状测量的原理是断层会造成岩层的错位,表现为断层面上岩层反射率的突变,在反射率突变的地方随机选择3 个点,使用最小二乘法拟合出最优平面,即可作为断层面。这两种方法也可以相互验证,得到更加准确的断层产状。注意断层面的延伸深度不可过大,且断层面与其两侧地貌面的拓扑关系也需仔细识别及建立。
2 地基LiDAR数据的DEM重建方法
地基LiDAR 获取的原始点云经处理后得到的地面点具有X、Y 坐标和高程数据,是高密度的离散高程点,能够为构建高精度高分辨率的DEM 提供足够的数据约束。但地基LiDAR 受到布设位置和通视条件的限制,在包括河沟的扫描区里,对弯曲河沟沟谷的扫描效果较差,易形成沟谷处的数据空区。因此,地基LiDAR 可以与扫描区的其他机载LiDAR 数据相拼接,弥补沟谷处的数据空区,提高地面的点云密度。
地面点云数据本质上为离散点数据。以离散点为数据源的规则格网DEM 建立有不规则三角网法(TIN) 和直接插值两类。不规则三角网法(TIN)是基于离散点建立的不规则三角网模型进行磨光内插得到规则格网DEM 的的方法[21]。直接插值是通过已知的格网点高程,计算未知的格网点高程。直接插值有多种方法,如基于地统计学的克里金插值法、反距离权重插值法、径向基函数插值法、自然邻域插值法、线性插值法、加权平均法等等[22-23]。前人对各种插值方法及其精度进行了评定,认为不同的地区对不同插值方法的适用性不同,需要针对具体地区进行分析,但总体而言,基于地统计学的克里金插值法精度最高[10,23-24]。
3 复杂地形条件下活动断层断错地貌数据获取与模型建立
本实验所用的地形点云数据扫描于甘肃省白银市景泰县小红山地区。当地为干旱气候,存在多条季节性冲沟,形成了广阔的冲积扇,植被低矮稀疏。扫描区面积约2.5 万m2,地处冲沟出山口,最大高差50 m。冲沟深度1~2 m,向冲积扇方向逐渐变浅;冲沟较为平直,仅出山口处具左旋位错,指示断层位置。山前有陡坎,垂直高约2 m。野外扫描时,共设置扫描站5 个,其位置如图4。

图4 断错地貌扫描站点位置黄星代表站点位置,红色虚线为推测断层位置;卫星图来自谷歌地图2020 CNES/AirbusFig.4 Location of scan positions in fault topographyThe yellow stars stand for the position of station,the red dotted line stands for the fault;The satellite image comes from Google Earth 2020 CNES/Airbus)
扫描获得的原始点云如图5a 所示。由于扫描区视野开阔,因此手动搜索离群点并删除。去除植被时,首先进行回波滤波,仅保留每束激光的最后一个反射点;再使用渐进加密的三角网滤波方法,考虑扫描区的植被低矮且分散的特征设置判别参数后,得到地面点。点云拼接操作中,以第一站为基准,先把其他四站以及当地机载Li-DAR 数据通过特征点初步与第一站相拼接;再使用改进的ICP 算法进行调整,共使用最佳拟合平面2 110 对,拼接误差达到0.013 6,拼接结果如图5b,拼接点云平均点云密度为80 m-²,点云密度分布如图5c。使用ArcGIS 软件导入点云,在3D Analyst Tools 模块中使用普通克里金方法建立DEM(图5d),分辨率为0.2 m。
使用高精度点云建立高分辨率的DEM,可以清晰地显示断层形态,有利于断层三维形态的显示,同时可以通过对断层陡坎、河沟错断等构造地貌进行高精度的测量,获得关于断层水平运动、垂直运动等的定量数据。
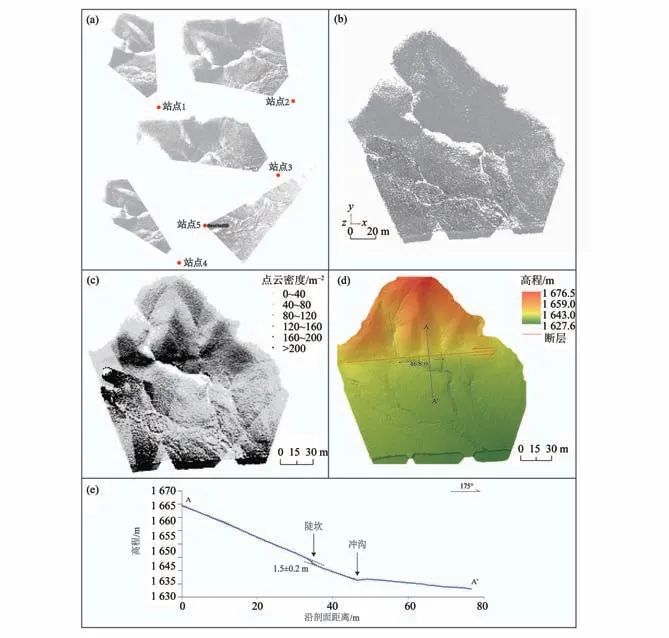
图5 断错地貌三维点云处理过程(a)各站点原始点云图像;(b)点云拼接结果;(c)扫描区点云密度;(d)DEM;(e)地形测量剖面Fig.5 Processing of 3D point from fault topography(a)image of primary point clouds from each scan position;(b)image of point clouds registration;(c)point density of scan area;(d)DEM;(e)topography measurement profile
4 工程场地与活动断层交汇三维场景再现
实验所用的数据扫描于宁夏省中卫市定武高速一桥梁与香山—天景山断裂交汇的位置。扫描区包括有少量植被覆盖的山体以及桥梁,面积约为9 000 m2,断层出露于山体两种不同颜色岩石接触处,实测断层走向为300°左右,倾角为41°左右,断层斜穿高速公路桥梁,桥梁走向北东86°左右。野外扫描时,共设置扫描站8 个,其位置如图6。
扫描获得的原始点云如图7(a)所示。由于扫描区视野开阔,因此手动搜索离群点并删除。分离地面点时,首先进行回波滤波,仅保留每束激光的最后一个反射点;其次使用渐进加密的三角网滤波方法,把植被集中处分割成相对平坦的几块分别进行滤波。点云拼接时,共使用最佳拟合平面740 558对,拼接误差达到0.028 2,拼接结果如图7(b)。最后把地面与桥梁分离,分类结果如图7(c)。

图6 工程场地与断裂交汇处扫描站点位置黄星代表站点位置,红色虚线为推测断层位置;卫星图来自谷歌地图2020 Maxar TechnologiesFig.6 Location of scan positions in the intersection of active fault and engineeringThe yellow stars stand for the position of station,the red dotted line stands for the fault;The satellite image comes from Google Earth 2020 Maxar Technologies

图7 工程场地与断裂交汇点云处理过程(a)各站点原始点云;(b)点云拼接结果;(c):(1)扫描区整体点云,(2)扫描区地面点,(3)扫描区工程点Fig.7 Processing of point clouds from the intersection of active fault and engineering(a)image of primary point clouds from each scan position;(b)image of point clouds registration;(c):(1)entire point clouds of scan area,(2)ground points,(3)engineering points
使用3Dreshaper 软件导入地面点云并建立TIN网,平滑后使用“Filling hole”工具对空洞进行插值填补;导入桥梁点云并建立TIN 网,平滑后,对较小的空洞使用“Filling hole”工具进行插值填补,对较大的空洞如未扫描到的桥墩部分,使用“Construct”工具栏中的“Best Cylinder”工具根据扫描到的桥墩部分进行拟合并拼接。根据在点云数据中观察到的不同反射率的岩石的接触部位以及现场实测的断层产状,在相应位置上建立相同产状的平面作为断层面。最终建模结果如图8,断层产状为212°∠41°,与桥梁成36°斜交关系。
工程场地和活动断裂交汇处的三维显示能使得工程与地面、断层面的关系更加直观,清晰地展示出工程所面临的安全隐患。另外,通过定量测量模型中的断层产状、断层与工程的相对位置以及工程本身的模型数据等,可以为模拟断层活动时工程的安全风险提供更全面和准确的依据。
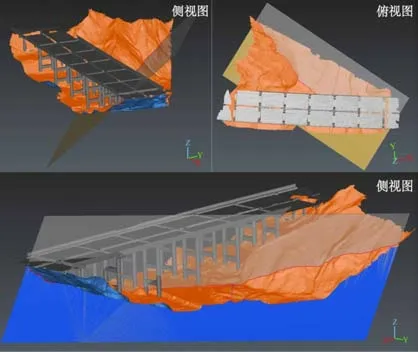
图8 工程场地与断裂交汇三维模型多角度图长方形平面为断层面位置,红色线为断层在地表迹线,橙红色曲面为地形面,灰黑色为桥梁Fig.8 Image of the intersection of active fault and engineering from multi-angleRectangular plane stands for fault plane,red line stands for the intersection of fault plane and terrain,orange curved surface stands for terrain,grey object stands for bridge
5 结论与展望
地基LiDAR 点云数据的处理过程虽然繁琐,但总体思路清晰,主要分为点云的去噪、滤波、分类和配准等4个步骤。目前已经发展出大量的处理算法,应针对不同特征的扫描区,有机地结合各类处理算法,才能获得更为准确、真实的三维点云。
不同的场景建模过程中,要结合实际选择合适的数据处理方法。本文实验所选择的两种场地类型中:活动断层断错微地貌建模中,多使用TIN不规则三角网法;对于规则形态工程建筑建模,则应结合工程本身的几何特性,结合使用TIN 不规则三角网法和规则曲面拟合;而对于对地形以及工程影响重大的断层,可以在提前测量其产状的基础上,使用平面作为断层面以建立模型。
实验测试结果显示,地基LiDAR 比较适合应用于活动构造领域中断裂区地形地貌的测绘,为断裂区精细地貌填图、微地貌识别和构造地貌定量研究带来更准确和丰富的数据。另外,还能使用地基LiDAR 对工程以及周围地形进行测量和三维建模,提供准确的数据对工程自身的安全性、稳定性等进行评估,对工程的地质灾害风险计算提供更加详实、准确的交互资料。总之,地基Li-DAR 能够为活动构造研究和工程测量提供高精度、高分辨率的三维数据,是一种简便快速的数据获取手段,其应用潜力十分巨大。
猜你喜欢
河北地质(2022年2期)2022-08-22 06:24:04
现代园艺(2017年23期)2018-01-18 06:58:12
智能计算机与应用(2017年2期)2017-05-04 00:45:34
应用海洋学学报(2015年2期)2015-11-22 07:36:28
长江工程职业技术学院学报(2014年4期)2014-11-30 02:41:40
河南科技(2014年18期)2014-02-27 14:14:52
河南科技(2014年7期)2014-02-27 14:11:06
河南科技(2014年4期)2014-02-27 14:07:25
城市地质(2013年4期)2013-03-11 15:20:53
断块油气田(2012年6期)2012-03-25 09:54:03
