基于云计算的温室巡检机器人
2021-05-26 05:06韩涛国谷志新涂文宇
林业机械与木工设备 2021年4期
韩涛国, 谷志新*, 涂文宇, 车 玉, 范 涛
(1.东北林业大学信息与计算机工程学院,黑龙江 哈尔滨 150040;2.东北林业大学机电工程学院,黑龙江 哈尔滨 150040)
随着我国农业的快速发展及人民生活水平的提高,对温室的生产需求逐年上升。而我国温室技术整体水平较低,种植者如果拥有一款智能设备,就能有效降低温室作业的人力成本,提高生产效率,减少监控难度。
曹起武[1]提出了一种农业机器人,可以实时收集环境信息并传输给云平台,借助云计算平台调用蚂蚁算法来实现对机器人行进路径的规划和实时定位,大大提升了计算效率。圣地亚哥大学的乌雷亚[2]通过云服务器计算并控制不同机器人来完成既定协作任务。此外,中国科学技术大学的秦琳琳等[3-5]提出了一种基于灰色预测模型的温室温湿度系统建模与预测控制方法,采用遗忘因子递推最小二乘法辨识子系统模型参数,建立温室温度系统模型,将系统预测问题描述为混合整数二次规划问题,有效预测和控制了温湿度变化。
基于以上研究本文提出一种温室巡检机器人,其采用STM32芯片为主控制单元,以可移动机器人为载体,由摄像机、红外成像仪、环境检测传感器等设备组成,通过机器视觉-电磁场-GPS-GIS 的多场信息融合指导机器人自主移动和巡检。通过自适应鲁棒PID控制算法实现对设定轨迹的跟踪。借助一些特定传感器来识别和规划路线,在温室中完成特定的检查任务。温室内还建立了通信系统可无线上传温室图像及温湿度等数据至云服务器储存区。云服务器则根据数据进行分析建模和计算,建立灰色预测模型来预测分析温室环境变化,并设计了微信程序以供检测人员通过微信实时方便地监测温室大棚的变化[6-11]。
1 系统硬件设计
巡检机器人硬件系统分为七大模块,分别是STM32 主控模块、电源模块、巡线模块、外围电路模块、电机驱动模块、摄像模块、通信模块。
整个巡检机器人要能稳定完成巡检任务,实时传送图像及温室数据,传感器的选择尤为重要。为了适应全国各地环境,选择 DHT11 温湿度传感器,湿度测量范围可达 20%~95%,温度测量范围可达 0~50 ℃,且温湿度测量误差均在5%以内。选择 TS832S 视频图传模组来传递图像,该图传模组具有体积小、质量轻适合巡检机器人携带等优点。传感器实物图如图1所示。
2 系统软件设计
农业巡检机器人系统软件程序主要工作包括以下几方面:系统初始化、自主寻迹、数据采集、数据传输。整个程序的编写及调试在 Keil 开发环境下完成。
2.1 寻迹程序设计
巡检机器人的寻迹程序设计是机器人能够自主稳定运行的基础,其包括机器人位置计算、转向控制和速度控制。
(1)位置计算。巡检机器人偏离引导线的位置由两个水平电感来确定,当电感距离电磁线越近时电感值越大,反之越小。统计偏离引导线不同距离得到的不同电感值再经由MATLAB数据拟合,电感值与偏离引导线距离关系如图2所示。

图1 传感器实物图
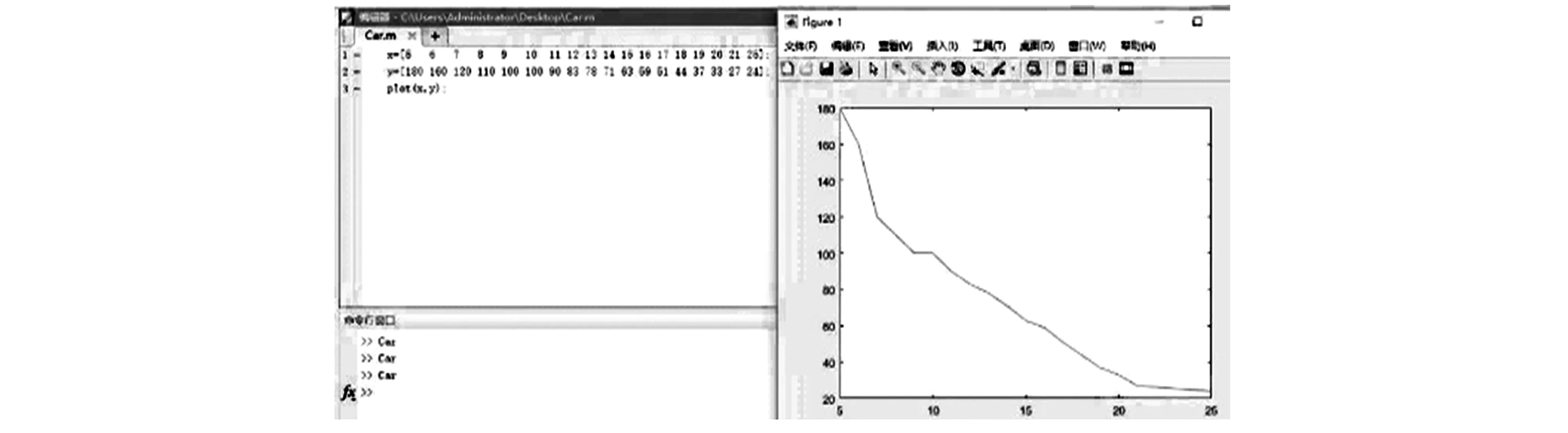
图2 电感值与偏离引导线距离的关系
由拟合曲线可知,电感值与实际偏差有较好的线性度,实际偏差位置可由确定一定系数后通过差比和算法求出。
(2)转向控制。为使巡检机器人稳定适速运行,需要有高效稳定的控制算法对机器人转向进行闭环反馈控制。本设计采用鲁棒性较好的经典PID控制算法,通过理论计算和实际参数调试来补偿,尽量减少各种外界因素对机器人运行的影响。
(3)速度控制。为使农业巡检机器人能够顺利运行在土壤环境或有坡度的路段,需对电机进行闭环以使电机产生足够大的驱动力,因此需要检测机器人运行速度。选择霍尔编码器。程序控制中通过测量一个周期内的脉冲个数便可推算出运行速度。温室巡检机器人行动时全程保证匀速,采用增量式 PI 算法来闭环电机速度控制。
2.2 云服务器与微信程序架构
微信服务器不能直接和 Wi-Fi 网络或者 ZigBee 网络进行通讯,因此给 Wi-Fi 网络和微信服务器间引进媒介——云服务器。云服务器主要负责实现接收并存储 Wi-Fi 网络传递的数据、与微信服务器通讯两部分功能。系统软件设计框图如图3所示。

图3 系统软件设计框图
(1)云服务器与微信服务器通信。云服务器与微信服务器进行通信共有两种情况:建立连接和获取数据。建立云服务器和微信服务器,对二者进行配置,设置云服务器为微信服务器提供接口信息,让二者可以建立连接。之后微信终端可以通过微信服务器向云服务器发送请求来获取数据。
(2)云服务器计算。云服务器收到不同消息类型和消息内容后会进行相应的反应。例如对近期的土壤湿度、温度,CO2浓度等数据建立灰色模型,可实现对温湿度及二氧化碳浓度等进行较为精准的预测。
3 灰色系统建模
灰色系统建模通过对原始数据的灰色处理,用“生成”的方法将原始数据求得规律性显现的新数据得到具有灰指规律的新数列,而其指数增长的特点符合微分方程解的特征,所以可通过建立微分方程建模。其建模步骤如下:
假设原始数据为:
x0=x01,x02…,x0n,# AUTONUM
对x(0)进行AGD运算,使之构成累加数列,对生成数列,建立相应的白化微分方程:
dx1dt+ax1=b,# AUTONUM
求解得a与b即获取灰色趋势预测模型为:
x1k+1=x01-bae-ak+ba,# AUTONUM
将计算得到的x1(k+1)做累减还原得到原始数据:
x0k+1=x1k+1-x1k+1,# AUTONUM
对于灰色趋势预测模型,要对预测的数据准确度做检验,这里选择后验差检验:
c=S1S2,# AUTONUM
P=Pq0k-q<0.6745S2,# AUTONUM
c和P是预测效果的 2 个重要指标,c值越小越好,p值越大越好。c<0.35,P>0.95良好。
本文以温室温度数据分析,围绕温室温度进行分析研究。采集 8个原始数据见表1,并建立灰色趋势预测模型,首先采集温度的数据值,采集的时间间隔取 10 s,温室温度实测值与灰色趋势预测值的曲线如图4所示。
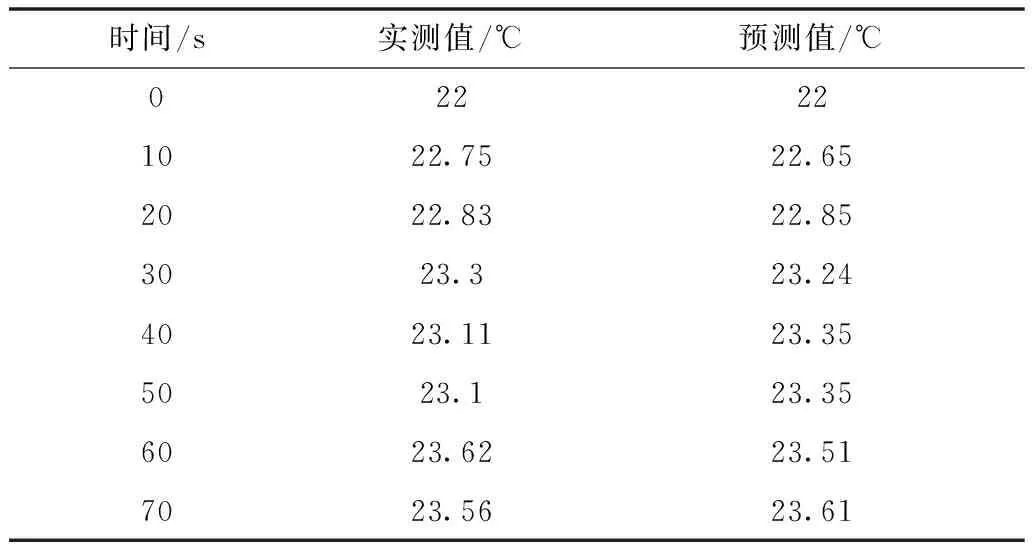
表1 温度实测值及预测值
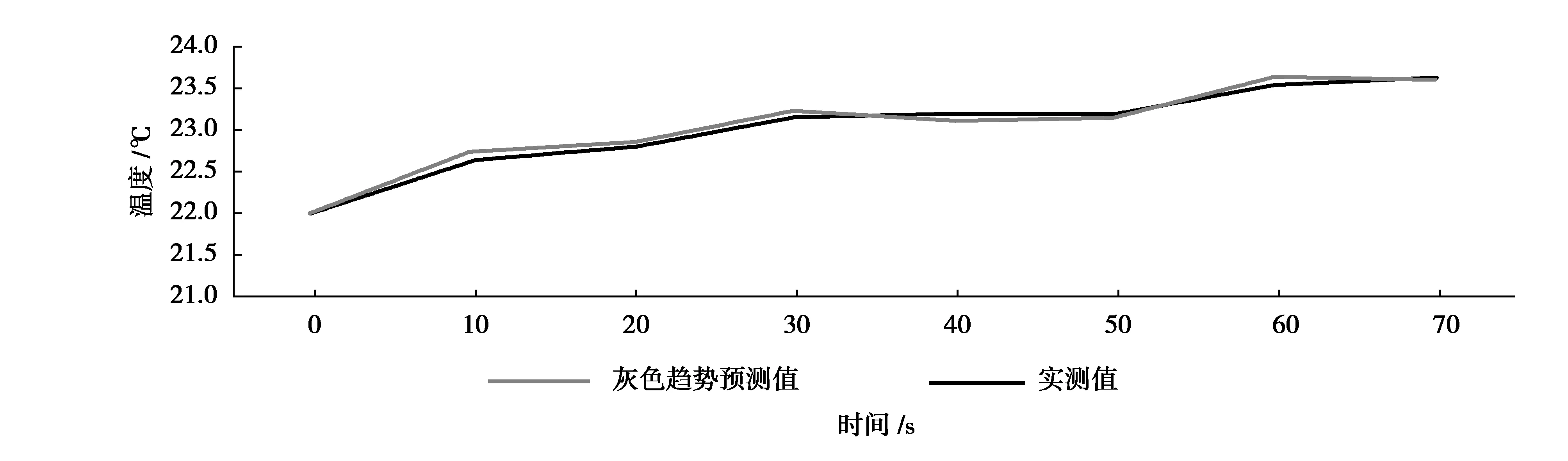
图4 温室温度实测值与灰色趋势预测值曲线图
针对温室温度建立灰色趋势预 测模型,可得实测值与预测值残差为 0.051 6,平均相对误差为 0.319 8%,由实证分析可以看出灰色趋势预测算法可有效的预测温室温度参数的变化趋势。
4 结论
(1)设计了巡检机器人系统的硬件和软件结构,采用STM32F429IGT6作为主控芯片,通过电磁导线进行巡检。
(2)建立了云系统架构,设计了连接云服务器的微信服务器供种植者实时查看温室情况。
(3)采用云计算平台对温室数据进行处理并建立灰色预测模型,试验证明该模型相对误差仅0.319 8%能有效预测温室环境变化趋势。
猜你喜欢
电源学报(2022年1期)2022-02-25
通信电源技术(2021年9期)2021-09-23
辽宁省博物馆馆刊(2021年0期)2021-07-23
家禽科学(2021年4期)2021-06-29
建材发展导向(2021年6期)2021-06-09
电源学报(2020年3期)2020-06-28
小学生学习指导(低年级)(2020年3期)2020-06-02
商品与质量(2018年49期)2018-12-07
Coco薇(2017年2期)2017-04-25
Coco薇(2017年2期)2017-04-25