搂耙式地膜捡拾机搂膜齿ANSYS分析
2021-05-26 05:06孙榆欢
林业机械与木工设备 2021年4期
孙榆欢, 张 鹏
(甘肃农业大学机电工程学院,甘肃 兰州 730070)
地膜覆盖种植能够有效减少水分蒸发,提高土壤水分利用率,促进农作物对水分的吸收,提高农作物生长品质。地膜覆盖能保持土壤适宜的湿度和温度,有利于肥料的分解,提高土地肥力,达到水肥协同的目的[1-2]。近年来,随着地膜生产技术的快速发展及在干旱地区玉米马铃薯等农作物的大面积推广使用,以及机械化残膜回收技术的不成熟,大量地膜被遗弃田间,残膜在土壤中以微塑料等形式积累,降低了土壤的透水性和通气性,破坏土壤机构,影响作物生长,同时造成严重的白色污染[3]。面对严峻形势的白色污染,加快农膜残留污染问题治理,对我国生态文明建设和农业绿色高质量发展具有重大意义。搂耙式地膜捡拾机可一次完成覆膜种植小麦、玉米、马铃薯等地的起膜、捡膜、集膜、堆膜等工序,配套动力广泛,安装使用方便,是残膜回收、解决地表白色污染的理想农机具。本文设计的搂膜齿为搂耙式地膜捡拾机关键部件,为确保在工作时搂膜齿能够满足要求,通过Solid Works完成三维建模,利用ANSYS Workbench进行静力学分析。
1 搂耙式地膜捡拾机结构及工作原理
搂耙式地膜捡拾机主要由机架、动力传动机构、起膜机构、捡膜机构、拨膜机构、集膜机构等部件组成。机架用于安装其他工作部件,实现与拖拉机三点挂接,是机组的主体结构。搂耙式地膜捡拾机如图1所示。

图1 搂耙式地膜捡拾机
搂耙式搂膜齿是地膜捡拾机中最主要的工作部件,它的结构直接影响地膜捡拾机的作业效果。搂耙式搂膜齿可将地膜捡拾机前面部件漏掉的残膜进行再次收集,将膜搂起,集放成堆,有利于集中回收离田。本文设计的搂耙式地膜捡拾机工作部件主要由1根热轧钢板所制的横梁和24根直径为6 mm 的Q235碳素结构钢所制的搂膜齿组成,其搂膜齿的形状为半圆弧状,间距为40 mm密排布置。用直径为10 mm的螺栓将搂膜齿与固定板联接,结构简单,装卸方便。搂耙式搂膜齿如图2所示。
工作时,拖拉机通过机架牵引搂膜齿,其入土深度为30~50 mm。在搂集残膜过程中,土壤、杂质以及残膜聚集于搂膜齿的上方空间。在此过程中,大部分土壤通过搂膜齿的间隙撒落于地面。当地膜收集到一定程度时,通过拖拉机的液压装置自卸残膜,将残膜集放于集膜箱中。

图2 搂耙式搂膜齿
2 搂膜齿ANSYS有限元分析
2.1 静力学分析目的
在搂耙式地膜捡拾机工作过程中,土壤的阻力将使搂膜齿产生一定的应力,进而产生应变。所产生的应力应变若通过一般的方法计算,则过程十分复杂而结果难以准确。目前,ANSYS静力学分析可较好地解决这类问题[4-5]。本文将运用ANSYS有限元静力学分析法对搂耙式搂膜齿进行应力应变分析以进行优化及加工。
2.2 搂膜齿有限元模型建立及前处理
ANSYS有限元静力学分析中建立模型主要包括建立标题、设定分析作业名称、建立作业实体模型、定义材料属性、施加工作载荷和划分有限元网格[6]。搂耙式搂膜齿有限元静力学分析模型的建立过程如下,在Solid Works环境中建立搂耙式搂膜齿三维模型,将其保存成igs格式,再将搂耙式搂膜齿三维模型调入ANSYS Workbench程序,通过Static Structural模块进行分析[7]。三维模型如图3所示。

图3 ANSYS中的三维模型
2.3 网格划分
选择搂耙式搂膜齿有限元静力学分析模型划分网格,其属性如下。材料选择Q235,搂膜齿直径为6 mm,弹性模量为2.06×105N/mm2,泊松比为0.3,许用应力为235 MPa,密度为7 800 kg/m3。根据搂膜齿形状及受力分析,搂膜齿模型分析中采用solid45单元分析[8]。网格划分如图4所示。

图4 搂膜齿网格划分
2.4 施加约束和载荷
分析搂耙式搂膜齿入土后的受力,可知其所受的力主要为土壤对搂膜齿的切削阻力Ft、摩擦力F和垂直入土的阻力Fy[9]。在地膜捡拾机工作时,其所承受的载荷是动态的,而搂膜齿变形后的载荷值却趋于稳定,对初始载荷进行20次迭代修正,可得到搂膜齿入土端载荷的变化曲线[10]。搂膜齿入土端节点变化曲线如图5所示。

图5 搂膜齿入土端节点变化曲线
由图5可知,经3次迭代,其绝大部分节点载荷呈规律性变化。4 513节点首先到达稳定状态,继而是处在强度较高位置的节点和离4 513节点比较近的点逐渐呈现稳定状态;围绕处在强度较高位置的节点,稳定状态的节点扩散开来,最终达到整个节点的平衡[11]。若忽略摩擦力,则试验测得搂膜齿平衡态入土端节点竖直力和水平力载荷分别约为120 N和150 N,即垂直入土的阻力Fy≈120 N,土壤对搂膜齿的切削阻力Ft≈150 N。因为地膜捡拾机设计有24根搂膜齿,故分配到每个搂膜齿上的载荷Fy1≈5 N,Ft1≈6.24 N。根据静力等效原则,每个单元所承受的载荷都转移到单元网格上,同时施加固定约束于搂膜齿的前端[12]。在ANSYS系统中,建立三维坐标系,给整个搂膜齿施加约束及载荷,施加的约束和载荷如图6所示。

图6 搂膜齿有限元模型施加约束和载荷图
3 有限元分析结果
经过 ANSYS有限元静力学程序求解后,得到施加载荷后搂膜齿X轴方向的位移变形云图[13-14]如图7所示。施加载荷后搂膜齿Y轴方向的位移变形云图如图8所示。

图7 搂膜齿X轴方向位移变形云图

图8 搂膜齿Y轴方向位移变形云图
分析搂膜齿位移变形云图可知,在Y轴方向搂膜齿位移约为0.3 404 mm,对整个搂膜齿而言,该变形量很小,可忽略不计;在X轴方向搂膜齿位移量为5.623 mm。施加载荷后搂膜齿X轴方向应力云图如图9所示。
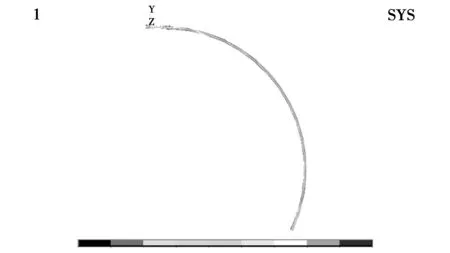
图9 搂膜齿X轴方向应力云图
施加载荷后搂膜齿Y轴方向应力云图如图10所示。

图10 搂膜齿Y轴方向应力云图
4 结论
分析搂耙式搂膜齿应力应变云图可知,Y轴方向搂膜齿应力主要分布于搂膜齿整个齿部,在搂膜齿前端拐点处出现最大应力,为32.284 MPa;X轴方向搂膜齿应力也主要分布于搂膜齿整个齿部,在搂膜齿前端拐点处出现最大应力,为50.934 MPa;搂膜齿的屈服极限强度为[σx]=235 MPa,Y轴方向和X轴方向应力均小于其屈服极限强度,搂耙式地膜捡拾机搂膜齿强度能够满足工作要求。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
水上消防(2022年2期)2022-07-22
中南大学学报(自然科学版)(2022年5期)2022-06-26
舰船科学技术(2021年12期)2021-03-29
北京航空航天大学学报(2020年3期)2021-01-14
新疆农机化(2020年3期)2020-12-14
今日农业(2020年16期)2020-12-14
新商务周刊(2019年21期)2019-12-23
名家名作(2017年3期)2017-09-15
科学种养(2016年5期)2016-05-23