基于优化控车策略改善ATO停车精度的研究与应用
2021-05-24 07:31何清泉
运输经理世界 2021年21期
何清泉
(厦门轨道交通集团有限公司运营分公司,福建厦门361000)
0 引言
列车ATO 自动驾驶是地铁线路运营的常用驾驶模式,信号系统通过科学的计算各方面参数合理地控制列车运行,达到列车高效、经济、舒适运行的目的。在列车ATO 自动驾驶模式下,信号系统负责发送牵引、制动命令,车辆牵引、制动系统负责执行。列车的牵引和制动系统及时准确地响应信号系统发出的牵引、制动命令是列车精准驾驶的基本保障,特别是信号系统制动策略与车辆制动系统执行的匹配程度直接影响了列车的停车精度。某地铁开通以来,在X 站点出现列车ATO 自动驾驶对标不准次数达46 次,欠标最大距离为0.74m,超过了停车标准±0.5m,影响包括:一是需要人工二次动车,影响效率和舒适度;二是会导致站台门无法联动打开,需要司机人工介入,影响了整个地铁线路的运营组织效率,成为该地铁急需解决的现场问题。
1 对标不准原因分析
列车进站精确停车时,信号系统采用连续制动曲线方式(即一次性制动至目标停车点,中途不缓解),可在停车控制过程中根据自身定位及车辆的信息反馈动态修正制动命令。地铁车辆制动系统使用电空混合制动方式,即分为电制动和空气制动两部分,列车在高速制动时,首先采用再生制动方式,将列车的动能转换为电能反馈给接触网,速度降低时,采用电阻制动,将动能转换为电阻的热能,因为电阻制动的效率与列车的速度成正比,因此当列车速度降低时,电阻制动的能力就会大幅下降,所以速度进一步降低时,需要引入空气制动进行制动能力的补偿和替代[1]。
在某地铁X 站点,因为土建结构的原因,导致了该站点进站停车进路的防护距离短,信号系统为了防止列车冲过移动授权终点,ATO 控制以较低的速度进站。在低速控制过程中对速度和减速度的偏差要求更高,导致信号系统输出制动级位的请求频繁调整,如图1所示。

图1 减速度偏差示意图
上文已经明确车辆制动系统为电空混合制动系统,该制动系统存在电制动过程、电空混合制动转换过程和空气制动过程。某地铁的车辆制动系统在速度高于8km/h 时由电制动负责列车减速,速度低于8km/h 时由空气制动介入,并分别以0.75m/s3恒定冲动限制比率同步衰减和增加,并在5km/h 时由空气制动完全替代电制动对列车进行制动控制。理论上,电制动的衰减与空气制动的增强应该完全同步的,但是实际上闸瓦的摩擦系数会根据温度的升高而降低,车辆无法使用动态的摩擦系数来计算,一般取较低的固定值,因此在空气制动刚介入时,实际上闸瓦温度低摩擦系数高,会产生一个大于计算值的减速度,造成减速度超过预期的情况。同时空气制动受机械部件的响应等方面影响,存在一定的延时,所以电空转换过程和空气制动过程在瞬时减速度控制精准度方面有较为明显的局限性。所以在列车速度低于8km/h,空气制动介入控车,信号系统控制级位变低时,空气制动响应慢,实际制动力高于信号系统的期望,迫使低速下的列车提前停车,最终造成列车欠标,如图2所示。

图2 优化前制动级位
2 优化措施可行性分析
针对空气制动响应与信号系统预期不符导致对标不准的问题,主要可以从以下两个方向进行优化:
一是调整电空转换时机,将电空转换时机调整为列车速度为零;二是优化信号系统ATO 自动驾驶控车策略。
第1 种方案可通过增加制动电阻功率,消除电空转换过程及空气制动过程,避免了因空气制动的自身特性无法满足信号系统制动需求的问题,让空气制动在列车零速时负责保持制动。但是该方案存在施工难度大、风险高、成本高、周期长等典型问题,而且优化后破坏了信号系统与车辆的匹配度,需重新进行调试和信号系统软件升级,因此在既有运营线路的优化改造可行性低。
第2 种方案通过研究合理的控车逻辑,优化ATO自动驾驶控车策略的软件,进行系统严格的测试和评估后,可一次性升级优化解决。该方案成本低、施工难度较小、周期短,具备较高的可行性[2]。
3 ATO 控车策略逻辑优化方案
某地铁线路列车在X 站因列车ATO 自动驾驶模式进站速度较低,在速度为8km/h 电制动与空气制动转换和空气制动时,车辆制动系统无法及时精准的响应信号系统控制级位的变化,造成列车停车对标不准。因此信号系统在低速时输出恒定的控制级位,降低车辆制动系统在低速时的响应要求,理论上是优化停车精度的有效方案。为保证ATO 的整体控车策略不受影响,需要在低速停站前增加目标距离、减速度、列车运行速度、列车速度与ATO 预期速度的偏差等作为触发输出恒定控制级位的条件,以确保策略有效,停车精准。
虽然该优化方案的可行性相对较高,但是根据上述方案来控制优化的控制逻辑已经明确表明在停车末端舍弃了信号系统制动控制级位的自适应调整功能,存在正常列车频繁出现冲欠标的风险和研发难度高的困难。首先,恒定制动级位与车辆制动控车策略的平衡点需要经过充分测试;其次,触发条件的限定参数不易匹配,逻辑优化效果不佳时,也会造成列车冲欠标。因此,经过实验室测试后,仍需要在现场开展大量的测试,以确保控车策略优化效果。
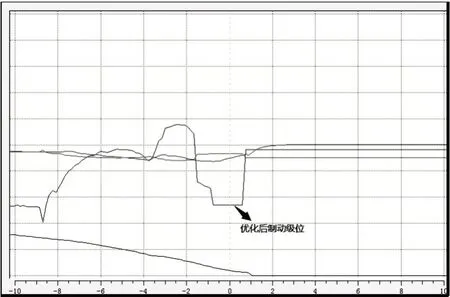
图3 优化后制动级位
4 ATO 控车策略优化测试
上文明确了控车策略的触发条件需要充分考虑列车距停车点距离、列车运行速度、减速度、与ATO目标速度差值等多方面因素,当列车进站停车过程中满足测试控车策略后,会输出恒定制动级位,从而提高列车进站停车精度。现场先后开展了7 个版本的测试,测试情况见表1~表4所示。

表1 ATO 策略1~策略5 测试情况
根据列车触发控车策略后的执行效果分析,策略1 至策略5 这五种优化策略,在对标精度和最大误差上均与期望存在一定的差距,策略6 和策略7 的测试结果在对标精度≥0.1m 的比例均为0,但最大误差精度策略7 更优于策略6,所以现场决定以策略7 作为最终的优化方案。ATO 策略执行效果见表4所示。

表4 ATO 策略执行效果

表2 ATO 策略6 测试情况

表3 ATO 策略7 测试情况
现场使用两列车升级后投入运营中,观察期间未再发现任何冲欠标现象,而且策略触发情况良好,策略触发后均能满足对标精度的要求。后续经全线升级列车软件策略,有效解决了该站列车对标问题。
5 结语
综上所述,通过优化ATO 控车策略的研究和测试,在列车较低速度运行时,增加信号系统输出恒定制动级位的触发条件,可有效改善列车对标精度,经过为期半年、7 种ATO 控车策略调整,涉及24 列电客车15 次动车验证,最终确定ATO 控车优化策略。对列车进行升级后投入运营,列车进站未出现冲欠标现象,而且停车精度较高,因此优化ATO 控车策略是解决因车辆电空转换缺陷导致对标不准问题的有效方案。该策略研究方式为地铁信号系统和车辆系统接口匹配中无法做到电制动介入速度为0(或接近0)的设备使用提供了有效的解决方案。
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-25
中国银幕(2022年4期)2022-04-07
建材发展导向(2021年18期)2021-11-05
小哥白尼(趣味科学)(2021年4期)2021-07-28
云南画报(2021年4期)2021-07-22
科学家(2021年24期)2021-04-25
名城绘(2019年6期)2019-10-21
小学生学习指导(低年级)(2019年6期)2019-07-22
电子制作(2019年9期)2019-05-30
小天使·五年级语数英综合(2017年3期)2017-04-25