
基于人、车、路和环境的AEB控制策略发展研究综述*
2021-05-24 05:45:24刘永涛吕凯光赵俊玮刘传攀乔洁
汽车技术 2021年5期
刘永涛 吕凯光 赵俊玮 刘传攀 乔洁
(1.长安大学,西安 710064;2.北京航空航天大学,北京 100191)
主题词:高级驾驶辅助系统 AEB系统 控制策略 人-车-路-环境
1 前言
根据美国高速公路安全管理局(National Highway Traffic Safety Administration,NHTSA)的研究报告,自动紧急制动(Autonomous Emergency Brake,AEB)系统可有效避免约38%因人为操纵不当造成的汽车追尾事故,降低27%的交通事故率[1]。但在实际应用中,AEB 系统的表现却不容乐观,其安全性和可靠性还亟待提高。而控制策略决定AEB的决策逻辑,控制其执行单元,关系到系统开启预警和紧急制动的控制时机。因此,针对AEB控制策略进行优化研究具有十分重要的现实意义。
目前,基于安全距离、碰撞时间(Time to Collision,TTC)的AEB 控制策略日趋成熟,但是实际运行过程中的避撞成功率还有待提高[2]。2019 年,美国汽车协会(American Automobile Association,AAA)发布的AEB 系统模拟测试结果显示,在32 km/h 的车速下,AEB 只有40%的成功率,当速度达到48 km/h 时,AEB 基本失效。此外,AEB 系统还存在相当高的误报警率与误制动率[3],严重影响了驾驶员的驾驶舒适性和行车安全性。有效、准确地识别前方目标是AEB 控制策略正常工作的前提,Wang[4]研究发现,受限于毫米波雷达的精度、摄像头的视野以及多传感器数据融合算法的局限性,传感器对环境感知的精度和速度以及对突发状况的处理仍然是AEB系统发展的重点和难点。林柏忠[5]认为,忽视真实路面附着系数所建立的AEB 控制策略容易造成AEB系统在高附着系数路面上制动频繁、低附着系数路面上避撞能力不足。张勇刚[6]发现,未考虑驾驶员个体差异、车辆制动性能差异和交通路况因素等建立的控制策略模型处于理想条件,不能反映真实的道路情况。为了提高AEB 控制策略的准确性和适应性,传感器识别目标的速度与精度、驾驶员特性的个性化、车辆属性的差异化、路面特性的时变化以及应用场景的多样化是未来AEB控制策略优化的研究重点。
由于经典AEB控制策略在人、车、路以及环境等方面仍存在一定的应用局限性,本文以此为切入点,总结AEB控制策略在驾驶员特性、车辆属性、路面特性、应用场景等维度的发展现状,提出基于人-车-路-环境协同的AEB 控制策略是未来的研究重点,以期为后续AEB控制策略进一步优化和改进提供技术依据和理论参考。
2 AEB经典控制策略的局限性
AEB 控制策略作为AEB 系统的关键核心,决定着系统的决策逻辑和执行单元。目前,经典的AEB 系统控制策略主要有基于行车间距的安全距离控制策略和基于驾驶员反应特性的碰撞发生时间控制策略,上述2种控制策略分别从距离尺度和时间尺度对车辆行驶过程中的危险状况进行判断。
马自达(Mazda)、本田(Honda)和NHTSA 分别提出了各自的安全距离控制策略[7-9],通过预警距离和制动距离进行控制判断。但是上述控制策略对制动距离只进行了简单的运动学分析,忽略了驾驶员特性、车辆属性的差异性和路面特性的时变性。对于驾驶员特性、车辆属性、路面特性对控制策略的影响,采用固定的驾驶员反应时间、制动延迟时间、路面附着系数来反映,一般取驾驶员反应时间为0.2~2.0 s,制动延迟时间为0.2 s,路面附着系数为附着极限值0.8,上述参数是通过大量试验获得的简化经验参数,不会随实际情况而动态变化,导致AEB系统在人-车-路-环境耦合状态下发生失效。
驾驶员在遇到紧急情况时对碰撞发生时间更为敏感,更加符合驾驶员对危险状况的判断[10],因此,Hayward[11]提出TTC,即前、后车的相对距离与相对速度的比值作为AEB 系统控制策略的评价指标。但是TTC控制策略仅引入了相对距离与相对速度2个参数,在实际过程中并不能达到避撞的要求,特别是在两车相对静止的工况下,TTC 接近无穷大,因此Coelingh 进一步提出了改进的二阶TTC控制策略[12]。此外,Milanes[13]提出了跟车时距(Time HeadWay,THW)的概念,Fancher[14]提出了用碰撞时间的倒数TTC-1表征“looming”效应的算法。上述新的AEB评价指标以及控制策略的提出都促进了AEB系统的完善与发展。但是目前的AEB控制策略忽略了驾驶员反应时间和车辆制动延迟的差异化,设置的TTC 阈值为定值,一般预警TTC 的阈值为1.6 s,制动TTC 的阈值为1.2 s。上述固定TTC 取值的控制策略无法反映不同驾驶风格驾驶员和不同制动特性车辆的差异性,如表1 所示。因此,AEB 控制策略需要进一步优化,以适应不同个性的驾驶员与不同类型的车辆。

表1 经典控制策略类型及局限性
目前,基于安全距离和安全时间的AEB 控制策略已经日趋成熟,并逐渐应用于AEB系统的实际开发,但是大多忽略了人、车、路以及环境等因素对车辆安全行驶状态判断的影响,虽然能满足大多数情况下的行车安全,但是过于保守,不利于交通效率的提高。因此,AEB控制策略在驾驶员特性、车辆属性、路面特性以及应用场景等方面仍存在较大的优化空间。
3 考虑不同因素的AEB控制策略
基于目前AEB 控制策略的发展现状和局限性,可通过考虑人、车、路以及环境等不同因素进行AEB控制策略的优化和改进。
3.1 驾驶员特性的个性化
人为因素是影响驾驶行为和行车安全的主导性因素,驾驶员通过感知、判断与决策对车辆进行实时动态控制,而驾驶行为具有复杂性、模糊性、非线性和时变性[15],这决定了驾驶员是人-车-路-环境系统中最复杂的部分。因此,考虑基于驾驶员特性的AEB控制策略,对于优化AEB控制策略具有重要的现实意义。
驾驶员特性包括驾驶员的生理特性、经验属性等相对稳定的静态特性,以及心理特性、驾驶意图和不规范操作等相对不稳定的动态特性,如图1所示。静态特性决定了驾驶员长期以来形成的独特驾驶状态和驾驶风格;动态特性则影响了驾驶员个性化的反应时间和AEB系统的介入时机。目前,经典的AEB 控制策略对个性化的驾驶员特性考虑不足,采用固定驾驶员反应时间参数建立的汽车防撞控制模型,对于驾驶风格比较激进的驾驶员而言,安全距离和安全时间过于保守,系统制动频繁,影响操作和驾驶体验,对于驾驶风格比较谨慎的驾驶员而言,安全距离和安全时间过于激进,系统响应迟缓,不能保证行车安全。

图1 驾驶员特性
驾驶员的静态特性决定了驾驶员的驾驶风格和驾驶状态。考虑到不同驾驶员差异化的驾驶状态和驾驶风格会影响AEB 控制策略的可靠性与安全性,Kiefer[16]等针对几种不同驾驶风格的驾驶员,建立了不同预警时间、不同碰撞时间的汽车前向碰撞预警(Forward Colli⁃sion Warning,FCW)系统。裴晓飞[17]结合国外驾驶员模型的统计数据,根据不同的驾驶员特性,为每种危险级别和驾驶风格分配了不同的TTC-1评价指标,建立了基于危险系数的分级报警与主动制动的安全距离模型。姜顺明[18]引入驾驶状态识别系数,将驾驶状态分为激进型、标准型和保守型3 类,并将其用于最小安全距离修正,提出一种基于驾驶状态识别的AEB 控制策略。由于驾驶状态具有时变特性,驾驶员的驾驶状态可能在一段时间后发生变化,AEB控制策略也要随着驾驶状态进行改变和调整。Hsiao[19]等根据驾驶员在快速变化的交通条件下行为的时变特性,提出了一种基于最大后验估计的时变系统辨识方法,可根据所识别的驾驶模型进行控制策略的调整。考虑不同驾驶员的驾驶风格和驾驶状态,可以有效提高AEB 控制策略对驾驶员个性化需求的接受度和适应性。
驾驶员的动态特性可以外在表现为驾驶员的决策与反应能力,驾驶员个性化的反应时间会影响AEB 控制策略的制定。边明远[20]对影响驾驶员反应能力的5个指标进行加权评定,提出了基于驾驶员反应时间的修正因子,改进了安全车距模型。李霖[21]等对典型危险工况下驾驶员的紧急制动行为进行分析,拟合了TTC-1与初始车速的关系曲线,提出了基于TTC-1的行车危险估计算法。上述方法利用驾驶员参数统计数据建立驾驶员反应时间、车速、安全距离之间的关系,改善了基于驾驶员特性的AEB控制策略。由于影响驾驶员特性的因素较多,对驾驶员特性的研究大多从驾驶员反应时间入手,缺乏对驾驶风格和驾驶状态的研究,且未定量说明驾驶风格和驾驶状态的判断依据与分类界限。Brannstrom[22]针对驾驶员驾驶过程中的分心状态,提出了一种通过持续评估驾驶员的转向行为来估计驾驶员注意力分散程度的算法。Diederichs[23]提出了一种通过对驾驶员眼球活动和踏板活动进行检测与分析来判断驾驶员的制动或加速意图的算法,可以将AEB 系统的介入时机推迟或提前,减少不必要的警报,提高驾驶员的舒适性与驾驶体验。驾驶员酒驾、分心、疲劳驾驶等不规范操作以及制动、加速等驾驶意图不但会影响驾驶员反应时间,而且会干预AEB系统的介入时机。因此,未来可以通过智能识别算法来判断驾驶员的驾驶状态和驾驶意图,及时调整AEB系统的介入时机,减少真实交通中错误干预的风险。
3.2 车辆属性的差异化
车辆的固有属性包括车辆的感知特性、结构特性与制动特性,固有属性的差异性决定了AEB 控制策略需要与AEB 系统硬件相结合进行优化和调整,提高对不同车辆的适应性。
车辆的感知特性与传感器等硬件的布置位置和角度、目标检测算法的效率和准确度以及先进感知技术的应用等息息相关。Anderson[24]研究发现,传感器位置、角度等参数的变化会对AEB 系统产生影响,进而确定了最优的传感器参数范围。但是由于目前环境感知主要借助摄像头、雷达等传感器,传感器识别目标和检测算法具有局限性,车车(Vehicle to Vehicle,V2V)通信开始应用到AEB 系统中。Hong[25]借助V2V 通信技术,及时获得了前方车辆的行驶信息与驾驶意图,提高了现有AEB系统的环境感知水平,克服了仅依靠传感器感知行驶区域的局限性。
车辆的结构特性包括外廓尺寸、整车质量、轴距、质心位置等因素。与乘用车相比,商用车质量大、质心高、载客量多,制动时很容易发生侧滑、折叠等交通事故。以乘用车为对象建立的控制策略不但具有局限性,也不适用于其他类型车辆。因此,研究商用车AEB 系统及其控制策略更加具有实际意义。乘用车、商用车等不同类型的车辆采用不同的制动器形式和制动方式,拥有不同的制动时延特性,如表2所示。乘用车一般采用液压制动,而气压制动则普遍应用于商用车制动系统,气压制动系统的制动时延特性在距离和时间上分别影响了基于行车间距的安全距离控制策略和基于TTC 的安全时间控制策略,这种差异要求AEB 控制策略要在考虑不同制动时延的情况下进行一定调整。Mithun[26]在考虑商用车气压制动时延的基础上,建立了商用车气压制动AMESim 模型。由于电控制动系统(Electronic Brake Systems,EBS)相较于传统的气动控制,响应时间和制动距离更短,Karthikeyan[27]研究并验证了EBS 的控制方案在商用车AEB 控制策略上的应用,提高了制动系统的响应速度。当前应用的AEB系统普遍以电子稳定控制系统(Electronic Stability Controller,ESC)作为执行器,随着未来制动系统的发展,线控制动等具有更快响应速度和更高精度的制动系统将显著提高AEB的制动性能。
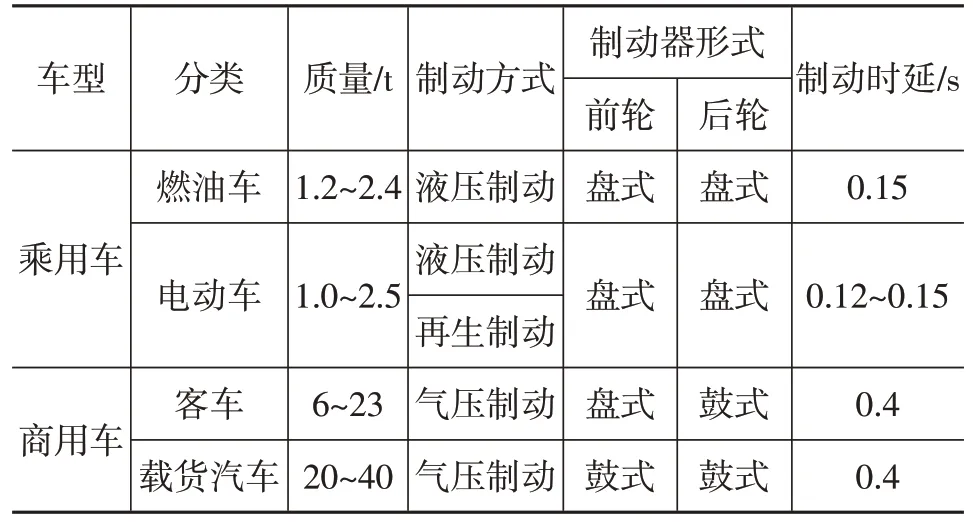
表2 各类车型的制动特性
AEB 系统是以提高驾驶员行车安全性为目标的高级驾驶辅助系统,基于新能源汽车的AEB 系统和控制策略是未来新的研究课题和发展趋势。考虑到电动汽车与传统汽车在动力和控制上的差异,刘宏伟[28]研究了基于线控制动系统的AEB 功能开发。田彦涛[29]对四轮驱动电动汽车进行了研究,建立了车辆换道的安全距离模型和相应的侧向控制器。电动汽车及其他新能源汽车的传动和制动与传统汽车的差异,导致了制动特性和控制策略的差别。对于具有再生制动能力的电动汽车,其制动力为制动器制动力与再生制动力之和,对于具有线控制动系统的电动汽车,其制动时延更小。未来,对于不同车型制动系统的研发,主要以更快的制动响应速度为目标,AEB 控制策略需要在此基础上达到软、硬件的最优结合,提高AEB系统的整体性能。
3.3 路面特性的时变化
制动减速度、路面附着系数会随着复杂多变的道路状况而动态变化,不同的路面类型决定了其附着条件和路面附着系数的差异,如表3所示。在经典AEB安全距离控制策略中,自车车速、相对车速和实际车间距可以分别通过车速传感器和车载雷达获得,但自车和目标车的最大制动减速度无法直接确定。目前的AEB控制策略大多忽略了路面特性的动态变化,将路面附着系数和车辆最大制动减速度设为定值,导致AEB 系统在不同路面上发生了失效,表现为在低附着路面上避撞能力不足、高附着路面上制动频繁,严重影响了AEB系统的可靠性与安全性。
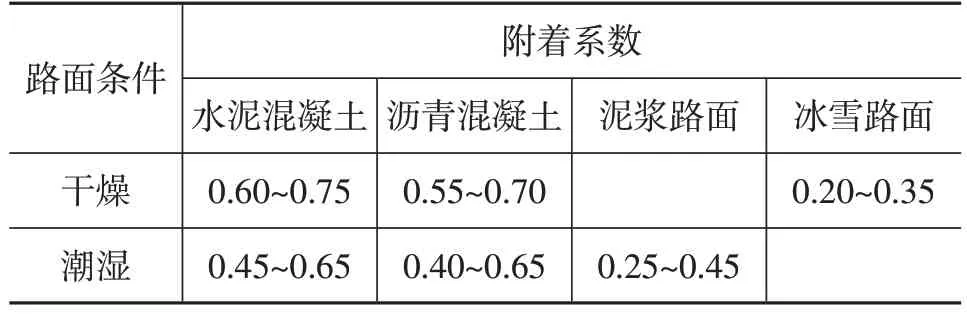
表3 不同路面附着系数
考虑到路面特性在以人-车-路-环境为整体的AEB系统中的重要性,将路面附着系数估计和路面特性识别算法应用到AEB控制策略中对于改善AEB系统的可靠性与安全性具有十分重要的意义。对路面附着系数进行估计的方法主要有基于效果的(Effect-based)方法和基于原因的(Cause-based)方法[30]。Effect-based 方法基于车辆动力学对路面附着系数进行间接估计,主要是通过分析路面附着系数与滑移率的关系曲线(μ-s曲线),以及根据轮胎动力学模型参数进行参数估计。Cause-based 方法利用传感器对路面信息进行直接测量,主要是借助声光传感器等对路面状态以及粗糙度进行识别。Kyongsu[31]等提出了轮胎路面附着系数预测模型,对不同路面附着系数进行估计,有效匹配汽车在不同路面上行驶时的最大制动减速度。根据路面附着系数的预测模型,Seiler[32]和Seungwuk[33]分别提出了Berkeley 安全距离控制策略和Seungwuk 安全距离控制策略。上述安全距离模型在Mazda、Honda、NHTSA控制策略的基础上,弥补了目前控制策略对路面附着系数的动态变化不敏感的缺点,促进了AEB 系统的实际开发与应用。
由于传感器成本较高,对环境要求苛刻,目前主要通过动力学模型对路面附着系数进行参数估计。在此基础上,国内外专家学者完善和优化了基于路面附着系数的AEB 控制策略。Han[34]利用轮胎联合滑移模型估算路面附着系数峰值来获得TTC的制动阈值,由于路面附着系数是实时识别的,因此提出的AEB 控制策略能够适应不同路面的情况。Sevil[35]也通过考虑不同路面附着系数、不同路面坡度等驾驶条件,提出了通过考虑轮胎-路面附着系数来适应碰撞预警和紧急制动的自适应AEB算法。除根据车辆动力学特性来估计路面附着系数外,研究人员借助深度学习、模糊推理等建立路面特征与附着系数之间的关系,并应用到AEB 控制策略中。Pyun[36]将路面特征、路面湿滑状况、天气等作为模糊子集,利用BP 神经网络识别行驶路况条件确定路面附着系数和车辆制动时的最大减速度,建立防撞预警系统。周兵[37]构建了“路面状况-车速-最大减速度”模糊推理模型,提出了路面附着系数随路面状况动态变化的AEB控制策略。路面附着系数估计的准确性影响着AEB系统的安全距离评价指标,但是通过车辆动力学模型间接计算、传感器直接识别、运用先进算法等获得路面附着系数的动态变化都有一定的局限性,实时性和准确性还有待提高。
3.4 应用场景的多样化
多样化的工况场景决定了AEB 系统的应用条件,符合应用场景的控制策略是AEB 系统正常工作的前提。经典AEB系统的应用场景主要针对水平良好路面上的追尾事故,而实际交通环境较为复杂,包含斜坡、弯道、交叉路口、跟车等工况,如表4 所示。此外,目前AEB 系统在前方车辆突然变道、行人突然横穿马路等工况下的表现也不容乐观。简单交通场景下的AEB控制策略不能适应复杂的道路工况,AEB 系统很容易发生失效。
由于斜坡、弯道、交叉路口和跟车队列等工况与正常工况相比具有复杂性与差异性,AEB控制策略有必要进行改善和优化来适应上述复杂的应用场景。车辆在斜坡上的受力和摩擦因数不同于水平路面,其最大制动减速度将受到重力的影响。Lin[38]通过分析车辆在斜坡上的受力来计算制动时间,提高了AEB 系统在斜坡路况下的制动性能。Kim[39]结合车辆模型和轮胎模型来估计坡度,提出了一种根据不同路况来选择合适参考坡度的AEB 控制策略。在弯道和交叉路口工况下,车辆之间的相对距离不同于水平路面上的直线工况。Lee[40]采用曲线坐标变换的方法考虑弯曲道路的几何要素,在弯曲道路上利用曲率半径获得车辆位置和相对距离,改善了AEB 系统在弯道工况下的避撞性能。武彪[41]采用路口碰撞场景中的TTC和预估通行侵入区域时间差(Esti⁃mating Post Encroachment Time,EPET)2 个动态特性参数,构建了路口安全边界条件模型。胡延平[42]对X形和垂直交叉轨迹2种特殊的汽车行驶工况进行研究,通过对碰撞域的划分来确定碰撞时间,建立了适用于该工况的安全距离模型。在实际跟车队列路况中,由于跟车队列制动的延迟特性,后方车辆很容易与前车发生碰撞。Shin[43]在正常驾驶员模型的前提下,通过对前、后碰撞进行预测,提出了一种防止与前、后车碰撞的AEB控制策略。胡满江[44]研究了在连续跟车队列条件下的前车紧急制动行为对连续后车造成的影响,在V2V 技术基础上提出了一种基于模型预测控制的多车纵向协同避撞算法。

表4 AEB系统在复杂路况下的应用场景
车辆在斜坡、弯道、交叉路口和跟车队列等复杂应用场景下行驶时很容易发生追尾事故,特别是连续追尾。而且随着AEB 系统的不断完善和发展,上述应用场景也将成为AEB 系统测试评价的一部分。因此,有必要通过改进和优化AEB 控制策略,使得AEB 系统在面对更多复杂交通场景时能够发挥有效作用,提高其制动性能与避撞性能。在传统AEB 系统中,由于传感器的局限性仅能获得相邻车辆的感知信息,制约了AEB控制策略的进一步发展。未来,随着V2X(Vehicle to X)通信技术的成熟与应用,借助车车、车路通信技术可以获取复杂工况下的车辆信息,使得车辆在斜坡、弯道、交叉路口和跟车队列等复杂工况下也能够实现避撞。
4 基于人-车-路-环境协同的AEB控制策略
驾驶人群多样化、驾驶车辆差异化、驾驶场景复杂化的发展趋势促使AEB控制策略应该在尽可能保证行车安全的情况下实现个性化、智能化的驾驶体验,提高AEB系统的适应性和驾驶员的舒适性。“人机共驾,车路协同,以人为本,以车为本”应当成为基于人-车-路-环境协同的AEB控制策略的设计理念。
驾驶员特性、车辆属性、路面特性、应用场景等因素不但影响AEB 系统的正常工作,而且与道路交通事故息息相关。目前,许多研究都侧重于对影响AEB 控制策略的单一因素进行优化,然而这些因素之间往往相互联系、协同作用,通过利用综合考虑人-车-路-环境等因素协同作用的AEB 控制策略,才能有效提高AEB 系统的避撞性能,如图2所示。He[45]在综合考虑人-车-路协同的基础上,基于实时峰值附着系数、主动制动系统性能参数和目标车辆运动信息,建立了新的安全距离避撞模型,并且在不干扰驾驶员正常避撞操作的前提下,改善了车辆的安全性和舒适性。Li[46]建立了考虑不同性格的驾驶员反应时间和大多数条件下的实际道路状况的AEB 控制策略,提高了AEB 系统的适应性与通用性。上述基于人-车-路-环境协同作用的AEB 控制策略,促进了AEB系统进一步落地应用。

图2 基于人-车-路-环境协同的AEB控制策略
驾驶员通过操纵车辆来适应不断变化的路面和不可预测的行驶环境,差异化的车辆性能、时变化的路面附着系数、复杂化的应用场景三者交汇于驾驶员个性化的操作,从而形成人-车-路-环境的闭环系统,成为信息动态交互的矛盾结合点与制约点。应当充分考虑驾驶员个性化的驾驶需求、差异化的车辆属性、动态变化的路面特性与智能化的AEB 系统之间的耦合关系,提高AEB控制策略对驾驶员、车辆、路面以及环境的适应性。
5 结束语
本文论述了AEB控制策略在人、车、路以及环境等单一影响因素下的局限与发展,研究表明,基于人-车-路-环境协同作用的AEB 控制策略是未来的发展趋势。在此基础上,得到以下结论:
a.驾驶员特性的个性化、车辆属性的差异化、路面特性的时变化以及应用场景的多样化等因素均对AEB控制策略产生显著影响,仅考虑单一因素并不能满足AEB系统对目前应用场景的综合性需求。
b.基于人-车-路-环境协同作用的AEB控制策略不仅更符合实际场景的应用,而且可显著提高AEB 系统的可靠性与安全性。
c.环境感知是AEB 控制策略能够准确决策的重要前提和影响因素。未来应借助V2X通信技术与传感器实现优势互补来达到环境感知的目的,促进AEB 系统和控制策略的进一步发展完善。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:13:42
汽车实用技术(2022年4期)2022-03-07 06:07:20
现代畜牧科技(2021年4期)2021-07-21 06:13:00
能源工程(2020年6期)2021-01-26 00:55:22
流行色(2020年9期)2020-07-16 08:08:54
山东冶金(2019年3期)2019-07-10 00:54:04
家庭影院技术(2018年9期)2018-11-02 05:31:28
消费导刊(2018年10期)2018-08-20 02:57:02
CHIP新电脑(2017年6期)2017-06-19 09:41:44
公民与法治(2016年4期)2016-05-17 04:09:26
