
离散元法在农业工程研究中的应用现状和展望
2021-05-19 01:49曾智伟曹秀龙李泽华王曦成
农业机械学报 2021年4期
曾智伟 马 旭 曹秀龙 李泽华 王曦成
(1.华南农业大学工程学院, 广州 510642; 2.华南农业大学数学与信息学院, 广州 510642)
0 引言
目前,日益增长的高质量农产品需求对农业机械设计提出了更高的要求。过去通用的理论分析和经验公式与实际农业生产情况差异性较大,并且农作物季节性较强,设计的样机田间试验时间也受限。伴随着现代力学、数值方法与计算机技术的迅速发展,一系列数值模拟软件对农业工程设计的辅助作用逐渐增强,计算机数值模拟技术以其强大的优越性和适用性引起越来越多农机科研人员的关注和重视[1-3]。计算机数值模拟仿真能够一定程度上替代繁杂的田间试验,省时、省力,可精简样机试制流程,提高设计质量和效率,降低设计成本;其可视性好,可对动态工作过程进行演示和仿真计算分析,为农业机械设计提供详实的直观信息和关键数据;还可对研究对象进行多层面、多维度的深度探究,揭示宏观实验的内在机理,为现代农业装备数字化设计提供理论基础。
离散元法是一种基于不连续性假设的计算机数值模拟方法[4]。与传统理论推导和试验分析相比,离散元法具有省时省力、成本低、结果可视化等优点;与基于连续理论的数值模拟方法(例如有限元法和计算流体动力学法)相比,离散元法在模拟非均质、非线性、各向异性的不连续体运动和动力学响应上具有模型保真度高、仿真结果准确度高等优势。离散元模拟仿真的可信度在很大程度上取决于其接触模型的选取和仿真参数的设定[5],因此研究接触模型和参数标定具有重要意义。农业装置经常涉及到大量的散体颗粒,散体颗粒既可以是其工作对象也可以是其承载介质[6]。随着现代农业机械向大型化、复合化方向的发展,对直接与农业物料相接触工作部件的各项性能提出了越来越高的要求,因此基于离散元法的农业机械关键部件优化设计技术和方法成为该领域研究的重要前沿和热点之一。
本文对目前农业工程研究领域中应用离散元法的相关研究成果进行综述,尤其对农业生产作业环节及农产品加工过程中的各种机械设备与装置展开综述。由于农业生产中常见物料多为散粒体,故本文集中探讨颗粒类离散元法,对块体和其他类型离散元方法不予考虑。同时,由于农业物料多为大宗高密度颗粒集合体,故本文主要针对软颗粒模型方法进行讨论,不涉及用于解决瞬时碰撞问题的硬颗粒模型。
本文首先对离散元法的基本原理和发展过程进行概述,介绍常用软件及其特点,然后对常见农业物料和土壤的离散元接触模型和参数标定进行分析,并对耕整地、种植、田间管理、收获、农产品采后加工等方面的离散元应用现状及动态进行综述,对国内外应用离散元法进行农业机械设计的典型实例进行深入探讨和分析,最后对离散元法在农业工程领域的应用前景和发展趋势加以展望。
1 离散元方法概述
1.1 基本原理
离散元法又称离散单元法,是一种用于模拟并分析散体介质系统动力学行为的数值方法,其主要思想是将模拟介质系统(理想情况下为散状物料)看作为具有一定形状及质量的颗粒集合,并用边界壁面表示机械工作部件,通过赋予颗粒之间及颗粒与边界之间特定的接触力学模型和参数,来考虑模拟介质和工作部件不同的物理特性及其相互作用关系,然后给予一定的初始边界条件,通过跟踪各单颗粒的运动,利用颗粒间、颗粒与边界间碰撞产生的能量交换来预测颗粒群的详细运动过程,并揭示相应的介质-部件互作关系规律;其基本原理是牛顿第二定律结合不同的本构关系以反映模拟介质系统的特殊物理特性,通过动力松弛法以时间步长为单位进行显式有限差分迭代求解;其基本假设是在很短的时间步长内,颗粒的速度和加速度为恒定值,颗粒的扰动只能传递给与之相邻的颗粒,单个颗粒的形变量远小于整体介质的变形,因此模型颗粒多为刚体,用接触处的重叠量描述由接触互作产生的形变量。其基本计算流程如图1所示。首先定义颗粒、边界、接触模型及其初始化参数,然后以时间步长为单位对模型进行迭代运行,在每一个时间步长中,相邻且有接触作用的颗粒和边界首先被确定,它们之间的接触力由重叠量计算得到;接着计算颗粒所受合力和合力矩,并确定位移量和转动量,更新颗粒的位置和朝向,用于下一时间步长的计算;重复这一步骤直至最后满足用户预设的迭代量或者迭代终止条件。
1.2 发展历程
1971年CUNDALL[7]提出适于岩石力学的离散元法,1979年CUNDALL等[8]又提出适用于土力学的离散元法,并推出二维圆盘程序BALL和三维圆球程序TRUBAL,其后分别发展成商业软件PFC2D和PFC3D,形成较系统的模型与方法,被称为软颗粒模型。随着PFC、EDEM等基于离散元法的商业软件成功应用,离散元技术在岩土工程、化工过程、地质灾害、矿山工程、海洋工程、农业工程、机械工程、大气科学、医疗制药、生命科学以及其他领域得到了广泛应用,有效地促进了这些学科的发展。离散元法在农业工程领域的应用发展可以分为以下几个阶段。
1.2.1初始期(1979—2000年)
这个阶段的研究主要集中在岩石、煤矿、水坝边坡稳定性等领域。国外离散元法在农业工程领域的应用首先是在谷物储藏和加工上[9-10]。王泳嘉[11]介绍了离散元法及其在岩土力学工程上的应用,标志着该方法被引入我国。此阶段,其在农业工程上的应用成果比较少,主要介绍了离散元法的概念,探讨了其在模拟农业物料上的可行性,尝试性地在物料流动特性分析等方面进行了应用[12-13]。受限于大量的模型理想化假设和有限的计算量,此时期的模拟仿真效果总体上与实际差距较大,离散元模型能大致反映实际系统的特征和趋势,但远未达到精确仿真的要求[14]。
1.2.2发展期(2001—2010年)
21世纪的前10年是初步发展阶段。这时有了一些通用离散元软件,如EDEM等,促进了离散元法的发展。期间国内相关的研究成果仍然不多,主要集中于播种、物料堆积、土壤耕作和施肥等方面。这个阶段的特点是采用CAD技术与离散元法单一结合,相关的离散元仿真从二维逐渐发展到三维。由于应用对象的大量增加,农业物料性状差异性大,已有接触模型的局限性凸显,模拟效果取决于接触模型近似实物模型的程度。其中综述性文献[15-16]具有代表性。
1.2.3快速发展期(2011年至今)
参考有限元法等其他计算机数值模拟方法在农业工程领域的发展轨迹,其快速发展期往往长达20年,前10年相关研究成果呈井喷型增长,后10年研究成果出现调整下降,但质量仍然保持一定程度的提高。离散元法在农业工程中的应用经历了快速发展期的前10年,接下来的10年仍将保持一定速率的增长,并且更加注重应用落地。
在快速发展时期,离散元仿真研究的目的从单一的运动力学分析向动力学及碰撞破裂机理研究等方向发展,同时考虑热因素、化学反应以及相变在内的多因素互作影响,因此研究手段从单一的离散元模拟分析,逐步发展到多相耦合分析阶段,有离散元-有限元耦合、离散元-计算流体力学耦合和离散元-多刚体动力学耦合等,不同模拟方法各有所长,各尽其能,这也扩展了离散元法的使用范围,分析的领域也扩展到食品加工检测、物料混合及筛分、秸秆处理、生物环境等几乎所有涉及农业散体物料的分学科。其中综述性文献[17-19]具有进展代表性。
1.3 常见程序软件及特点
随着离散介质领域科学研究和工程应用的深入,基于离散元的高性能计算颗粒力学分析软件受到极大的关注,各种相关计算分析软件得到了快速发展。目前常见的软件可分为开源软件、商业软件和少许自主开发内部使用测试软件。主要开源软件包括LIGGGHTS[20]、YADE[21]、MercuryDPM[22]等;主要商业软件包括PFC[23]和EDEM[24]。
PFC全称为Particle Flow Code,是第一款商业通用离散元软件,由离散元法提出者CUNDALL作为联合创始人创办的ITASCA工程咨询公司于1994年首次推出,经过多次主版本更新,目前已是第6版。PFC是基于命令流的操作界面,如图2a所示。应用该软件需要掌握其内置的FISH语言和命令指令才能实现人机交互,近期的版本兼容Python语言编程操作,在一定程度上降低了学习使用难度,提高了软件可操作性。PFC支持自主输入命令流来创建模型,其总体架构设计具有高普适性,对模拟结构相对复杂、介质组分相对多样化的系统提供了可能。并且其所有内置算法、方程式和参数均可在用户文档和理论文档中查看,方便用户了解仿真模拟数学模型和物理意义,以及按需微调自主定义。该软件的主要特点为:既有开源软件的透明度和灵活性,也具有商业软件的易用性和技术支持功能。
EDEM全称为Engineering Discrete Element Modelling,是由英国DEM Solutions Ltd. 公司2006年开发并推出的一款综合计算机辅助设计工程软件。作为众多商业软件中的后起之秀,其发展迅猛,2019年被美国Altair Engineering公司收购并进一步整合。从建模到求解以及后处理的整个仿真过程,EDEM实现了全图形化操作,如图2b所示,与大多数用户熟悉的计算机辅助设计软件操作环境类似。其耦合功能强大,接口设置完善,率先实现了EDEM-Fluent、EDEM-ANSYS、EDEM-Adams等多种仿真平台的无缝对接。在并入Altair Engineering公司之后,最新版的软件支持EDEM-MotionSolve、EDEM-OpenFOAM等耦合计算求解。该软件的主要特点为实用性高、入门简单,同时具有较为强大的耦合求解和跨平台操作功能。
AgriDEM是由吉林大学于建群等开发的,具有自主知识产权的集设计和性能分析评价为一体的针对农业工程领域的新型计算机辅助设计工程软件,其基本思路是由农机部件的CAD模型建立其离散元法分析模型,实现了三维CAD软件与自主设计的三维离散元法软件、三维计算流体动学软件和三维多刚体动力学软件的集成。该软件的特点是:在设计阶段,通过修改农机部件的CAD模型,能对不同结构和尺寸的农机部件进行性能分析和评价,由此实现农机部件结构方案和尺寸参数的优化;通过农机部件的CAD模型,能进行农机部件工作过程的动态仿真,由此分析农机部件的工作机理、结构以及尺寸参数和运动参数对其性能的影响,为农机部件的优化设计提供了一种新方法[25]。该软件创新性地将计算机辅助设计软件与数值模拟算法有机结合,在农业机械创新设计中具有重要意义,但由于国内研发离散元软件起步晚,基础相对薄弱,该软件相比于国际上先进的商业离散元软件,在体系架构、算法可靠性、数据可视化性、系统可维护性等方面还存在差距,目前仍处于内部测试阶段,并未对外开放。近年来其开发团队不断对其体系结构、边界建模模块、求解器、可视化模块等关键核心功能进行改进研究[26-30]。
总体来说,不同的软件各有特点和优势,在实际应用过程中,应该综合考虑模拟需求、工程实际、经费预算等因素合理选择使用。离散元法的发展已有半个世纪,目前尚未出现成熟的专用于农业工程领域的商业化离散元软件。究其原因,主要的难点在于农业工程领域所涉及的散体颗粒具有种类多、物理性质跨度大、随时间季节变化显著等特点,同时农业机械装备在工作性质、工作方式和工作对象等方面也存在较大差异,研发农业工程领域的专用离散元软件技术难度大、开发周期长。目前绝大部分的农业工程领域学者采用通用商业离散元软件进行模拟仿真,因此对于农业物理离散颗粒体或者颗粒群的接触模型选择及其参数标定至关重要。
2 接触模型及参数标定
2.1 参数标定简介
农业工程领域涉及的典型散体颗粒包括土壤散体颗粒和农业物料颗粒。土壤颗粒受土壤种类和形态的影响性质各异。农业物料包括谷物种子、生物质、饲料、肥料、果蔬等(如表1)。同种属性的颗粒性质不完全相同,不同属性的颗粒性质更是千差万别。由于土壤颗粒和农业物料一般为易吸湿介质,其材料特性随着含水量的变化而变化,相比矿物或金属塑料等颗粒材料而言,其颗粒性质更加复杂。因此,即使同种属性的农业物料颗粒的模型及参数仍需根据实际情况分别进行建模和标定,才能保证后续模拟研究的准确性。
颗粒之间以及颗粒与边界之间的作用关系包括弹性、粘性、塑性等接触、摩擦和粘附等。从动力学的角度来看,这些接触关系的共同作用效果通过法向和切向的力-位移法则以及转动方向的力矩-角度法则来支配颗粒系统的行为;从能量的角度来看,弹性接触积聚能量,粘塑性接触和摩擦损耗能量,系统能量处于一个动态的变化过程中;从变形体力学的角度看,这些接触作用反映了材料不同的本构关系,因此需要不同的接触模型来表达。常见的应用于农业工程领域散体颗粒模拟的接触模型包括线弹性模型、弹塑性模型、粘弹性模型、表面粘附模型、切线刚度模型等[37]。离散元仿真软件均有一系列内置的接触模型,尽管名称不尽相同,但基本为以上几种基本接触模型的组合或者是基于基本接触模型的微调改进,同时部分软件提供开发接口,供用户根据实际仿真需求自行开发特殊接触模型。
离散元模型仿真需要的参数可分为材料本征参数和接触力学参数两大类。材料本征参数包括颗粒的形状、粒径分布、密度、弹性模量、泊松比、屈服强度等;接触力学参数包括恢复系数、静摩擦因数、滚动摩擦因数、粘滞阻尼、粘附系数等。材料本征参数相对容易确定,大多可以通过标准化的试验进行测量,但接触力学参数往往为微观参数,非常难甚至无法通过实测得到。早期的研究多使用理论分析假设值或者经验值,后期的学者探索使用了不同的逆向标定方法来确定,其基本思想为反复试错调整模型参数直至模型宏观力学行为与实际相符或非常接近。接触模型的微观参数与真实物料的宏观性质不存在明显的对应关系,对于某种特定状态下的物料,可能存在特定的关系,但总的来说,并没有普遍适用的关系。
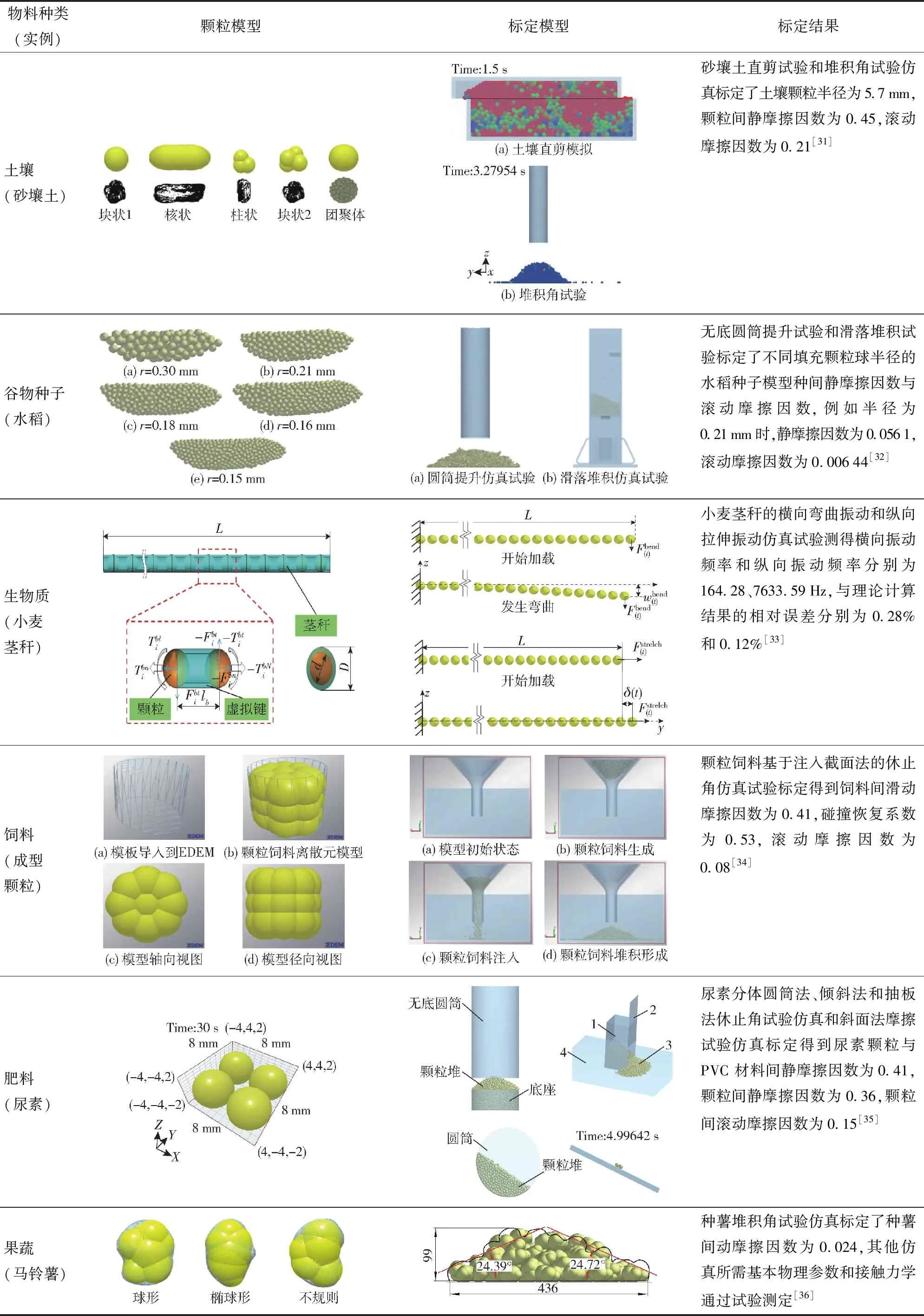
表1 常见农业物料离散元模型参数标定实例Tab.1 Common agricultural materials DEM parameters calibration
2.2 土壤散体颗粒接触模型及参数标定
土壤在触土部件的作用下,发生变形、破碎、移动、翻转等一系列复杂行为。作为一种复杂的多相混合物,土壤在耕作过程中多表现出很强的离散特性,因此离散元法是分析外力作用下土壤动态行为变化过程的较理想方法。土壤特性可以分为物理特性、机械特性、动态特性等。在农业工程范畴内考虑较多的物理特性包括土粒密度、土壤容重、含水量和孔隙度;机械特性包括内摩擦角、内聚力、弹性模量、泊松比、抗剪强度、贯入阻力;动态特性包括土壤切削力和扰动特征。
ASAF等[38]提出一种确定离散元模型无粘性沙土土壤参数的方法系统。土壤颗粒为由两个圆盘组合而成的二维模型,颗粒间接触关系为线性模型,首先使用圆锥型和平板型土壤贯入仪进行一系列的原位沉降试验,然后通过Nelder-Mead优化算法来寻找最优土壤摩擦因数和弹性常数组合使得试验值和仿真值差异最小,其中优化求解的初始值通过土壤能量法和弹塑性法则来确定,以保证优化结果唯一性,最后通过3个仿真实例验证了提出的土壤参数标定方法的正确性。
王宪良等[31]基于敏感性分析和代理模型理论,提出了一种通用的离散元土壤模型的参数标定优化方法,首先由基本试验测得土壤离散元模型所需基本参数,然后搭建土壤直剪试验和堆积角试验仿真模型并进行敏感性分析得出关键待标定参数,然后再以这些参数为自变量,试验实测值为求解目标构建代理模型,优化迭代求解导出最优参数组合。作者以一种砂壤土为例,用不同形状和尺寸的颗粒组合描述土壤团聚体,选择了兼具弹塑性和粘结性的The Edinburgh Elasto-Plastic Cohesion Model作为接触模型,确定了模型敏感参数为土壤颗粒半径、静摩擦因数以及滚动摩擦因数,使用优化后的参数建立的轮胎-土壤仿真模型预测的接触应力误差在5%左右。
对于非粘性土或者低凝聚性土壤,例如沙土,相关学者多假设颗粒间的粘结作用效果忽略不计,采用简化高效的接触模型来提供仿真计算效率。张锐等[39]在EDEM软件中使用了Herzt-Mindlin-Deresiewicz无滑动接触模型;UCGUL等[40-41]提出的Hysteretic Spring接触模型能够综合表示土壤的弹性应变和塑性变形行为;OBERMAYR等[42]在Pasimodo软件中自行定义了一种线性模型来描述沙土本构关系。对于粘性土,由于有内聚力和粘附力的存在,接触模型更为复杂,UCGUL等[43]基于EDEM的Hysteretic Spring接触模型,整合了线弹性内聚力和黏结力接触模型;武涛等[44]采用Hertz-Mindlin with JKR Cohesion接触模型进行土壤堆积角仿真试验,对影响粘结力的土壤颗粒间关键参数,如JKR 表面能、恢复系数、静摩擦因数与滚动摩擦因数进行了标定;OBERMAYR等[45]在Pasimodo无粘土壤模型中加入了颗粒间正向吸引力的概率;而在PFC软件中,应用较多的为采用Parallel Bond接触模型来模拟土壤粘性[46-48]。同时由于土壤含水率是影响土壤粘性和弹塑性的主要因素,有关学者还对不同含水率的土壤颗粒模型分别进行了标定[49-50]。
2.3 农业物料颗粒接触模型及参数标定
2.3.1粮油作物种子
粮油作物种子作为一种典型的散体颗粒物料,大多数为球形或者近球形,非常适合用离散元法来进行研究。目前应用较多的粮油作物种子包括大豆、玉米、水稻、油菜等。选择合适的接触模型并赋予精确标定的参数是保证粮油作物种子在播种、收获、清选和后期加工处理等一系列过程仿真正确性的前提条件。
张荣芳等[32]采用颗粒聚合粘结的方法,使用Hertz-Mindlin with bonding接触模型,用不同半径的填充颗粒球构建水稻种子离散元模型,首先通过圆筒提升和滑落堆积两种仿真试验确定水稻种子间静摩擦因数和滚动摩擦因数,仿真结果显示随着填充颗粒半径减小、填充颗粒数的增加,仿真得到的休止角更加稳定,但仿真时长也有所增加,最后通过水稻气固两相流耦合仿真试验,确定了仿真用时较低且仿真精度较高的最优填充颗粒球半径。
HORABIK等[51]提出了一种用来确定离散元种子模型在不同湿度下恢复系数的方法。选用豌豆、大豆和油菜籽作为研究对象,使用高速摄像仪测得种子在单次弹跳试验和反复弹跳试验中弹起高度,使用压电陶瓷压力传感器测得其冲击力随时间的响应曲线,模型探索了3种不同的粘弹性接触模型仿真不同湿度种子的正确性,结果表明3种接触模型分别适用3种不同种子,同一种种子在不同湿度下的力学性质差异显著,随着湿度的增加,种子恢复系数随碰撞速度的变化关系趋于非线性,因此也要求离散元接触模型具有非线性激励响应特性。
BOAC等[52]汇总了大豆、玉米、小麦、高粱、水稻、大麦、燕麦、葵花籽、油菜籽等一系列谷物和油料种子的材料及接触模型参数,并选用大豆检验了使用文献中模型参数作为离散元仿真基本输入值的可行性,单球模型和多球模型的比较结果显示单球大豆模型能更加准确地模拟散体物料特性,最优参数组合包括颗粒恢复系数0.6、颗粒静摩擦因数0.45、颗粒滚动摩擦因数0.05、标准差系数0.4的颗粒粒径正态分布,以及颗粒剪切模量1.04 MPa。
刘彩玲等[53]提出了一种基于三维激光扫描法的模拟水稻等非规则球形颗粒材料的离散元模型建立方法,结果表明多颗粒聚合模型比常规椭球体模型仿真精度更高,与实际试验结果更加接近。马文鹏等[54]以休止角和堆积角为试验指标,采用响应面分析法和非支配排序遗传算法Ⅱ相结合,对苜蓿种子离散元模型参数进行了标定。基于堆积试验和休止角试验模拟仿真,国内外学者还对玉米[55-56]、小麦[57]、大豆[58]等常见谷物以及三七种子[59]、水稻芽种[60]等少见特殊谷物种子离散元模型的参数进行了系统标定研究。
2.3.2生物质颗粒
常见的生物质物料包括秸秆和农产品加工副产品,如谷物外壳、木材边角料等,这些物料及其生成品与金属塑料等工业材料有着完全不同的力学特性,主要表现为非线性和各向异性。
李永奎等[61]使用离散元对玉米秸秆粉料在单向受压状态下的力学行为进行了仿真分析,基于玉米秸秆粉料的黏弹特性,模型中使用软球模型表示物料,通过调试得到模型参数取值的初始范围,模型边界约束条件由实际单模孔致密成型实验确定,对比实测值和模拟值得出了离散元颗粒参数的最佳取值范围,包括法向和切向刚度系数以及摩擦因数。
冯俊小等[62]采用离散元法对杆状秸秆颗粒在固态发酵筒内混合状态仿真所需参数进行了标定,杆状秸秆为长径比为8的模型颗粒,颗粒接触模型采用了Hertz-Mindlin (no slip)与Linear Cohesion相结合的复合模型,综合利用堆积实验和转筒内颗粒混合运动实验对颗粒间参数和颗粒与壁面接触参数进行了标定,仿真结果表明颗粒间静摩擦因数是影响物料堆积性质的主要参数,而颗粒与壁面粘性系数为物料混合程度的决定性因素。
针对收获作业谷草分离的技术要求,国内外学者基于离散元模型对柔性作物茎秆的弯曲[64]、剪切[65]、拉伸[66-67]、压缩[68-69]、振动响应[33,70]等力学特性以及仿真参数敏感性[71]和应用效果[72]进行了一系列的研究。
2.3.3饲料颗粒
合成饲料加工过程的粉碎、混合、调质、制粒等加工环节是影响饲料质量的重要因素。
彭飞等[34]采用离散元法对颗粒饲料建模,并提出一种基于注入截面法的休止角测定装置与方法来标定离散元参数,采用27球填充组合的方式表示挤压成型圆柱体颗粒饲料,应用Hertz-Mindlin接触模型,通过调用软件数据库和文献确定了仿真参数的合理取值范围。休止角仿真模拟结果显示滑动摩擦因数为最显著影响因素,通过回归分析和响应面分析得到最优的颗粒饲料离散元标定参数组合,优化后的模型休止角仿真结果与试验值相比相对误差为3.1%。
廖宜涛等[73-74]分别对饲料油菜茎秆果荚初期和薹期的离散元模型参数进行了标定,其中初期茎秆模型应用Hertz-Mindlin接触模型和圆筒提升堆积法标定了油菜茎秆颗粒间静摩擦因数、滚动摩擦因数和饲料油菜茎秆-钢静摩擦因数;薹期茎秆模型在上述仿真的基础上,采用Hertz-Mindlin with bonding接触模型和茎秆弯曲破坏仿真试验标定了茎秆颗粒法向接触刚度、切向接触刚度、临界法向应力与临界切向应力等粘结参数。
2.3.4肥料颗粒
肥料分为有机肥和化学肥料,有机肥是植物或动物及其废弃物发酵腐熟的含碳有机物料,化学肥料包括氮肥、磷肥、钾肥、微肥、复合肥料等,常见的有颗粒状和液态两种形态,目前已有学者利用离散元对颗粒状尿素和各种畜禽粪便有机肥进行了参数标定。
温翔宇等[35]利用Plackett-Burman试验方法进行尿素颗粒的休止角仿真试验,采用了分体圆筒法、倾斜法和抽板法3种不同的测试方法,并辅以斜面法测量尿素颗粒与PVC材料间静摩擦因数仿真试验,尿素颗粒为两种不同直径且分别正态分布的混合颗粒集合,接触模型采用Hertz-Mindin (no slip)接触模型,显著性筛选试验结果显示在检测的10个模型参数中,仅有尿素颗粒间静摩擦因数、尿素颗粒间滚动摩擦因数、尿素颗粒与PVC 材料间静摩擦因数在多个颗粒特性仿真试验中对休止角有显著影响,使用标定模型参数进行的无底圆筒法休止角验证试验结果表明其与实际测量值误差在5%之内。
刘彩玲等[75]以大颗粒干燥尿素颗粒为研究对象,设置模型颗粒粒径为正态分布,采用Hertz-Mindlin无滑动接触力学模型,利用Plackett-Burman 休止角仿真试验进行了模型边界参数显著性筛选,确定影响尿素颗粒堆积特性的显著参数依次为尿素颗粒间滚动摩擦因数、颗粒间静摩擦因数和颗粒与ABS 板间静摩擦因数,仿真试验还表明休止角与3个显著参数呈正相关关系。利用自制静摩擦因数测量仪结合虚拟仿真标定方法得出了最优参数组合,仿真休止角与实际试验休止角相对误差仅为0.36%,不同含水率下的实际试验休止角与标定参数下的仿真休止角相对误差均不大于3.25%。
在有机肥仿真模拟方面,国内学者普遍采用Hertz-Mindlin with Johnson-Kendall-Roberts凝聚力接触模型来描述颗粒间本构关系,主要得益于该模型中存在颗粒间表面能参数(JKR表面能),可以用于模拟细小潮湿颗粒间的黏聚作用,因此这一参数也是显著性参数分析和标定的重要备选对象。韩树杰等[76]对牛粪基厩肥采用注入式堆积角试验仿真对厩肥-厩肥恢复系数、厩肥-钢恢复系数、JKR 表面能进行了标定,仿真堆积角与物理试验值相对误差为2.73%;袁全春等[77]基于圆筒提升法休止角试验仿真标定了羊粪基有机肥颗粒间滚动摩擦因数、表面能JKR和有机肥-钢板滚动摩擦因数,使用标定的参数进行仿真验证试验,仿真休止角与实际休止角的相对误差为0.42%;罗帅等[78]对不同含水率的蚯蚓粪基质仿真标定了颗粒间静摩擦因数、颗粒间滚动摩擦因数和JKR表面能,并且构建了休止角与含水率的关系模型。国外学者使用其他颗粒接触模型来描述粘湿有机肥颗粒接触关系,LANDRY[79]以猪粪基有机肥为研究对象进行直剪试验仿真,在线性接触模型中,颗粒刚度系数正切向比值参数为影响内摩擦角的主要因素,而对于简化Herzt-Mindlin接触模型而言,剪切模量则为影响表观粘聚力和内摩擦角的主要因素。
2.3.5果蔬颗粒
常见的离散元在果蔬类农产品方面的应用包括马铃薯、苹果、葡萄等。这些模型一般所需的颗粒数量较低,但颗粒的形状复杂且往往不可过度简化,主要用于探讨果蔬产品在收获和产后加工过程中互相之间以及与机具部件之间的碰撞机理,以及所带来的挫伤和刺穿等损伤问题。
VAN ZEEBROECK等[81]首次提出将离散元法应用于苹果擦伤模拟中,采用了简化的单球模型近似苹果,使用了非线性的Kuwabara and Kono接触模型,使用钟摆试验确定了苹果颗粒的阻尼系数和刚度系数,并通过试验确定了模型中颗粒间接触力峰值与实际苹果擦伤深度的对应关系,离散元仿真苹果在振动箱内的擦伤深度与验证试验值接近,但由于模型缺乏记录颗粒间接触位置的功能,所以多次擦伤面积和体积无法监测。SCHEFFLER等[82]在上述文献的基础上使用多球组合模型表示苹果,采用基于Mindlin-Deresiewicz的正切接触模型,并且模型可以同时连续记录多次碰撞过程中苹果的接触力大小及位置,从而实现擦伤深度、面积和体积的全方位预测,坠落仿真试验得到的冲击力与实测值相对误差在11%之内,转筒和振动箱仿真试验中擦伤各类指标参数与实测值相对误差均在50%之内。
石林榕等[36]根据测量统计结果将马铃薯分为球形、椭球形和不规则3种类型,并以测量的特征尺寸平均值为依据建立种薯模型,采用Hertz-Mindlin模型,种薯的基本物理参数和接触力学参数由试验测定和计算得到,其中静摩擦因数由自制的测定装置测量得到,种薯间的动摩擦因数由堆积角模型间接预测得到。使用确定的参数进行马铃薯堆积角仿真试验,模型相对误差为1.33%;应用于设计的马铃薯排种装置仿真试验,与台架试验相比相对误差小于10%。基于Herzt-Mindlin接触模型,刘文政等[83]对微型马铃薯进行了标定,无底圆筒提升法堆积角试验和落种法试验相对误差均小于5%。
综上所述,参数标定的方法在获取物料参数过程中有着重要的应用。参数标定分析过程中物料接触模型和自身的材料属性是确保有效模拟和输出正确结果的关键。农业物料材料的特性在很大程度上取决于物料的含水率,所以颗粒间接触模型的选取主要依据之一为物料颗粒含水率。确定农业颗粒物料参数值的方法主要为直接测量法(在颗粒物料或接触物体表面测量物料特性,并将获取的数值直接作为输入参数)和批量校准法(进行相对简单的实验室或现场试验,然后进行重复数值分析,通过改变各参数值,直到获得满意的结果)。直接测量法的优点是获得的参数值独立于所使用的分析软件和接触模型。主要缺点是如果农业物料颗粒相对较小且形状不规则,则很难在颗粒或接触表面测量物料属性。对于材料属性形状、尺寸分布、密度、弹性模量、剪切模量和泊松比等都可通过试验获取,但对于物料间相互作用属性恢复系数、静摩擦因数和滚动摩擦因数、塑性或粘性阻尼系数等很难通过试验获得,通常需要通过颗粒材料参数试验标定方法获取,目前参数标定方法主要采用无底圆筒法、旋转箱自流测定法和塌落测定法等,由于没有通用方法,各标定方法存在很大差异性,不同方法获取的参数有一定差异。因此,如何选择合适的颗粒间接触模型和通用的标定方法仍然是研究的难点问题之一。
3 农业工程研究领域中离散元法应用现状
现代农业机械化作业一般包括耕整地、种植、田间管理和收获等环节,作物收获后的处理加工也是农业生产中的重要一环,各环节中典型农业机械装备与离散颗粒状农业物料的相互作用是影响其工作效率和作业性能的重要因素。不同部件的结构、作业方式、作业对象各不相同,因此对其进行性能优化的方式方法也不尽相同。表2列举了基于离散元法的典型农业机械设备优化设计实例。
3.1 耕整地机械
耕整地过程是各类耕作机具的触土部件对土壤进行松动、翻转、破碎、移动等一系列作用效果的过程,为农作物的播种作业和出苗生长创造有利的条件,此过程能量消耗巨大,往往占到总农业生产能耗的一半及以上。农业土壤与触土部件间的相互作用规律是设计、选择、使用和调试耕作机具的基础,研究土壤和触土部件间的互作规律即是研究它们之间的相互作用力和作用效果,作用效果包括土壤受力后的运动规律以及机具的磨损变形程度。
方会敏等[88]建立了旋耕刀与土壤互作模型,利用土壤示踪块测得土壤在室内旋耕实验中的水平位移和侧向位移平均值,实测值和仿真值相对误差在20%左右,仿真结果表明土壤位移随深度增加而增加,中层土壤发生侧向重置的情况最频繁,可以通过提高旋耕机转速增加土壤抛撒范围和程度。
袁军等[89]利用DEM-MBD耦合算法,对一种自激振动深松机作业过程进行了仿真分析,离散元模型主要为耕作土壤,采用自定义的湿颗粒模型作为接触模型,进行了深松铲动力学响应分析、弹簧和牵引力响应分析以及土壤扰动动态过程分析。仿真结果不仅定性地解释了深松机减阻机理,还提供了深松铲入土角、铲柄质心高度、弹簧力和牵引力等关键设计参数的变化范围。
胡建平等[84]建立了双轴旋耕机-水稻秸秆-粘壤土的离散元仿真模型,秸秆为多颗粒拼接近似细高圆柱体形状,土壤为黏结颗粒群,其材料接触参数由堆积角试验确定并随土层位置变化而变化,基于仿真模型结果构建了旋耕功耗与前刀轴回转半径、后刀轴回转半径、后刀轴中心相对前刀轴中心竖直距离和前后轴回转圆水平距离4个结构参数的数学模型,并优化求解得出了最小功耗的结构设计参数组合。
刘鹏等[90]基于DEM-CFD耦合法研究了秸秆还田机作用下玉米秸秆的粉碎和抛撒运动过程和规律,得出了粉碎刀轴转速在满足粉碎程度要求的前提下不宜过大,以免影响碎秆抛撒均匀度的结论。近几年来,学者通过离散元软件仿真模拟了凿式[91-92]、直柄平板式[93]、箭形式[94]、侧翼式[95-96]、分层交互式[97]、折线破土刃式[98]、拟合曲线型[99]等多种结构形式的深松铲,重点分析了土壤的扰动行为。基于减小耕作阻力,优化土壤扰动效果这一目标,国内外学者对锄式开沟器[100-102]、铲式开沟器[103-105]、圆盘开沟器[106]等触土部件进行了离散元仿真模拟,数值分析结果为开发设计新型低阻触土机具提供了技术指导。
3.2 种植机械
种植机械包括播种机械和移栽机械两大类,主要功能为将籽粒或者种苗精准定量地放入土壤中预先设定的位置,由仿形、开沟、排种、导种、覆土、镇压等多个关键工作部件组合构成,精密种植技术要求仿形机构灵活平稳、开沟器开沟深度稳定沟形一致、排种器不漏不重、导种器投送均匀性好、覆土器覆土均匀稳定、镇压器压力适当且一致,明确排种器和导种器与种子的互作机理,其他部件与土壤的互作机理是优化设计种植机械的先决条件。相关学者主要应用离散元法对各种排种器的结构和工作参数进行仿真优化。

表2 基于离散元法的典型农业机械设备优化设计实例Tab.2 Typical agricultural machinery design and optimization based on DEM
丁力等[85,107]基于离散元与计算流体动力学气固耦合法对玉米气吸式排种器的进气口位置和种盘结构参数进行了仿真优化,采用Bonding 黏结模型填充生成大扁形、小扁形和类圆形3 类玉米籽粒,选用充种区型孔压强、自清种区型孔压强、清种区型孔压强、携种区型孔压强为评价指标,对进气口位置相关的气室接口位置、进气口垂直角和进气口水平角3个因素进行了多因素仿真分析,排种验证试验结果与仿真结果基本一致,并优于原排种器工作性能。
鹿芳媛等[108-109]基于离散元法对水稻秧盘育秧流水线的振动式精密播种装置的定量供种机构和振动匀种机构进行了仿真分析,仿真结果不仅对后期的试验研究具有指导作用,也为揭示试验结果和现象内在的动力学机理提供了参考作用,基于离散元仿真优化参数设计的精密播种装置播种合格指数提高到了92%,空穴指数控制在2%以下。
针对不同排种器结构原理,国内外学者对圆盘式[110]、窝眼轮式[111-112]、外槽轮式[113]、指夹式[114]、勺轮式[115]、凸勺式[116]等机械排种器,气吹式[117]、 旋转气吸式[118]等气力式排种器,以及机械气力组合式排种器[119-120]进行了仿真分析及优化。针对不同的作业对象,国内外学者对三七气吸滚筒式排种器[121]、三七气吸窝眼轮式排种器[122]、马铃薯气吸圆盘式排种器[123]、大蒜双鸭嘴式正头机构[124]等播种装置进行了模拟研究。赵淑红等[125]基于离散元法对一种V 型凹槽拨轮式导种器进行仿真优化,提高了导种投送的均匀性和稳定性。
3.3 田间管理机械
肥料是农作物生长的原料之一,现代农业生产要求探索节本增效的施肥新技术和新设备,如变量、分层、深施、穴施等精确施肥方法,实现农业生产的可持续性发展,施肥准确性和稳定性是评价施肥机作业性能的重要指标。
苑进等[126]采用离散元法对设计的联合作业机的土肥掺混作业环节进行了建模分析,选取Hertz-Mindlin with JKR黏性力学模型作为接触模型,模拟分析了钻头转速和掺混时间对菌肥和土壤掺混均匀程度的影响。模型菌肥颗粒群和土壤颗粒群的动态变化特征表明土肥掺混分为3个阶段,分别是初期的对流混合、中期的剪切混合以及后期的扩散混合,仿真结果显示最优掺混作业参数为转速250 r/min和掺混时间14 s。
张季琴等[127]通过构建螺旋轮排肥器离散元模型研究了控制序列不同排肥口开度和排肥轴转速的组合对排肥稳定性的影响规律,根据实际测得的复合肥颗粒粒径分布情况,模型将颗粒肥简化为3种不同尺寸的组合颗粒模型。仿真试验表明,相比于大目标施肥量工况,小目标施肥量下的施肥稳定性更取决于排肥器的控制序列,应该合理选择开度和转速,避开边界值。
杨庆璐等[128]建立了空间分层施肥器作业的离散元模型,首先通过单因素仿真试验确定了施肥调节片安装角的合理变化范围,然后进行二次正交旋转组合仿真试验,建立了排肥口出肥量与施肥装置结构参数的回归模型,优化求解得出当施肥调节片前端宽度为3.61 mm,后端宽度为21.52 mm,安装角为43.23°时,排肥口上、中、下3层出肥量比例为最佳值。田间试验进一步证实了选用优化的结构参数组合,空间分层施肥器在不同作业速度和不同施肥量要求下工作性能稳定。
在穴式精量施肥技术上,国内外相关学者对行间滚轮式穴式排肥器[129]和腔盘式精量穴施肥装置[86]建模仿真,主要对穴施机定点机构、扎穴机构和排肥机构开展优化设计。近几年来,相关学者采用离散元法对变量施肥器[130]、深施肥器[131-132]、分层施肥器[133]等多种新型施肥机械进行了仿真研究,模拟分析结果为施肥机具的设计提供了方向。
3.4 收获机械
农产品的清选环节,是将目标农业物料与其他各种杂质材料无损分离的过程,对于谷物类作物,指的是谷物与秸秆、叶子等;对于根茎类作物,指的是作物与土壤、石块、秧蔓、杂草等,分离筛选装置的结构参数和工作参数对于分离筛选效果和收获产品品质至关重要,而作业效率和减损防损往往有不同的参数要求,难以兼顾,因此如何优化收获机械的结构和作业参数使其达到最佳综合效果是学者们关注的重点。
魏忠彩等[87]构建了马铃薯收获机中的波浪形筛面薯土分离机构工作的离散元模型,用多球聚合模型表示椭球形和类球形的薯块,而土壤块体由黏结颗粒模型表示,在一定的外力作用下黏结力键会发生断裂来近似土块的激振解聚特性。借助离散元模型综合研究分析了筛面倾角和筛面运行速度对土块破碎分离过程以及薯块碰撞特征的影响,并用优化得到的结构参数和运行参数组合进行了田间试验,相关测试指标显示机具工作性能优良。
王万章等[134]通过构建小麦植株离散元模型和离散元-多体动力学耦合的数值模拟仿真体系,研究了小麦从联合收获机螺旋输送器喂入开始,经倾斜输送器,直至到达脱粒滚筒连续输送过程中的运动情况和迁移规律。
戴飞等[135]基于离散元软件EDEM对小区小麦种子收获机的伸缩拨指式锥型脱粒装置进行了模拟仿真和物料运动特征解析,建立了包含小麦籽粒和短茎秆的脱粒物料颗粒模型,分析研究了脱粒物料中小麦籽粒平均速度、位移随脱输时间的变化规律,改进后样机有效减小了籽粒损失率和破碎率,规避了易滞种、堵塞等问题。
3.5 其他机械
离散元法在农产品采后加工处理机械的设计研究上有着广泛的应用[136]。侯俊铭等[137]基于离散元粘结接触理论,构建了蓖麻蒴果在双滚筒柔性脱壳机中脱壳过程的仿真模型,研究了蓖麻蒴果在脱壳室内群体运动规律,并进行了相关参数优化及脱壳损伤原理分析;GUZMAN等[138]采用离散元软件PFC模拟了大麻纤维球磨机的功率和能耗,结果表明研磨速度是影响机器工作能耗最关键的因素。
近几年来,离散元法也被学者应用于有机肥颗粒转筒干燥设备[139]、饲料加工监测装置[140]、饲料调质器[141]、螺旋喂料输送器[142]、槽轮式补饲机[143]、混合搅拌装置[144]、残膜回收清杂装置[145]等农业机械设备的设计上。
实际农业生产和试验过程中,颗粒物料与机具表现出十分复杂的运动行为和力学行为,而这些行为通常无法直接使用现有基本理论,尤其是基于连续介质理论的方法来解释。离散元法是根据颗粒物料本身特有的离散特性建立数学模型,将需要分析的物体看作离散颗粒的集合,这就与离散物质本身的性质相符。因此,离散单元法在分析具有离散体性质的物料时具有很大的优越性和不可替代性。并且在分析过程中可以为粒子流的运动、受力、热量和能量传递提供高级的解决途径。另外,离散单元法使用简单的方程就可以对高复杂系统的静态和动态行为进行模拟,使得解决实际问题的途径简捷可行。对于连续介质理论无法解释和分析的物质力学行为,离散单元法可以进行较准确的预测和分析。
4 发展趋势
离散元法在农业工程领域中的应用对提高农业机械设备研究和设计水平,缩短研发周期,节省试验成本,提高成品的工作性能和使用寿命等具有重大意义。如何加快推进离散元模拟仿真技术全方位走向工业应用,成为农机设计者常规使用的计算机辅助设计方法和数值计算分析方法,是下一阶段需要重点关注的问题。MARIGO等[146]指出缺乏有效准确的模型参数确定方法是制约离散元法在工业设计中广泛应用的最主要原因,其次模型中颗粒的尺寸、形状和数量等也是重要的限制条件。
离散元的接触模型和微观参数对于整体模型的正确性和仿真的效率具有决定性的作用,但尚未见报道通用且实用的确定方法,相关研究多为通过反复试错来逼近宏观试验结果,标定参数的选取和优化仿真参数初始值的确定往往随机性大,缺乏一种能够被广泛认可接受的系统方法。然而,目前大量的研究集中于离散元法在实际工程问题中的应用研究,关于接触模型和参数标定的基础研究工作不多。随着实际应用对更加准确高效离散元接触模型和参数标定方法的需求不断增长,加强基础研究势在必行。另外,目前不同的软件平台对接触模型和相关参数有各自的定义和命名系统,虽然大同小异但仍存在细微差别,常见的例子包括滚动摩擦因数[147]和接触阻尼系数[148],这就造成了标定得到的参数往往仅在同款软件类似应用中具有参考性,不具备跨平台通用性,所以标准化仿真软件和方法也将是一个重要的发展方向。
对于与大量散体颗粒相接触的大型农业机械,目前的离散元模拟研究只能借助有限的颗粒数构建模型机具进行原理性的定性研究,而不可能用足够多的颗粒对机器进行实用性的研究,模型结果对于实践应用往往仅具有参考性而非指导性。目前模型颗粒尺寸上限为毫米级、仿真时间上限为数秒、颗粒数量上限为百万级,无法满足一些大型的工程应用。例如大型全尺寸耕作机械与千万量级土壤颗粒集合的互作关系仿真,可以通过提高计算机计算和存储能力并相应地改进离散元算法来解决。随着计算机技术的不断发展,这些问题会在不远的未来得到解决,这将大大促进离散元法在农机研发设计上的广泛应用,最终实现部分替代繁琐冗长的样机试制和田间试验环节。
5 展望
随着农业科技进步和发展,农业生产需要功能更多、效率更高、生产成本更低的农业机械。离散元法在农机设计和虚拟试验中发挥着极为重要的作用,目前已经成为解决与散粒体相关的问题主要研究方法之一,凡涉及颗粒流动、破碎、混合等现象的应用都可以采用离散元法得到较好的仿真分析结果。总体上,离散元法作为一种基于不连续理论的数值模拟方法,实践证明可以广泛应用于农业工程领域的许多方面,如何提高模拟方法的通用性、仿真结果的精准性以及提高模型计算效率,是未来离散元法及其应用的进一步发展趋势,具体包括:
(1)由于计算时间和计算机性能的限制,建模过程中简化的圆球颗粒并不足以弥补颗粒物料形状差异所产生的偏差。未来应继续深入研究物料特性的微观参数,从逼近真实物料特性的角度进行考量,重点分析颗粒间的接触与脱离,存在的相互运动、接触力与能量的联系,构建完善的颗粒体接触模型以表征颗粒体间的力学关系。
(2)离散元数值模拟能直观展示设备实际的工作情况,极大地提高了优化改进的工作效率。进一步推动适用于农业工程领域实际问题,基于离散元法的专业通用软件平台的开发具有重要的意义,该平台的成熟应用将解决现有软件存在的针对性不足和仿真结果跨平台通用性差等问题,为解决众多农业机械设计研究中涉及颗粒和结构的复杂向题,提供了一个高效的工具。
(3)实际农业生产过程中涉及复杂的几何体运动和多相流问题,单纯依靠离散元法性能分析软件已经不能满足复杂的模拟要求,多软件耦合已成为离散元法发展的一个重要方向,在大型农业机械应用中离散元分析软件通常还需与其他CAE工具联合使用,如CFD(计算流体动力学)、FEA(有限元分析)和RBD(刚体动力学)等连续体分析方法。离散元分析软件的模型还可以同热传导模型、质量传递模型、化学反应动力学及总体平衡模型进行耦合,进而解决更加复杂的工业应用问题,扩展离散元法在农业工程领域的应用范围。
猜你喜欢
材料与冶金学报(2022年2期)2022-08-10
汽车电器(2021年8期)2021-08-24
汽车电器(2021年7期)2021-08-04
汽车维修与保养(2020年11期)2020-06-09
中学数学杂志(初中版)(2020年6期)2020-01-06
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
新课程·下旬(2018年7期)2018-01-19
北京航空航天大学学报(2017年2期)2017-11-24
中学生数理化·七年级数学人教版(2016年4期)2016-11-19
