起重机自动化控制技术在航天器AIT工作中的应用研究
2021-05-18 01:40
起重运输机械 2021年8期
北京卫星环境工程研究所 北京 100094
0 引言
随着“中国制造2025”的不断推进,国内制造业也在不断向数字化、网络化、智能化方向转变。对起重机制造业而言,自动化起重机凭借精准定位、无人操作等特点所带来的高生产效率和低人力成本的优势,使其越来越受到用户的青睐。
对于航天制造业,起重机是在航天器产品AIT(总装、测试、试验)过程中不可或缺的辅助设备。由于所吊装产品的重要性,对起重机动作的精准性、稳定性都提出了较高的要求,而自动化起重机的特点正能契合这一要求,降低了传统起重机依靠操作人员自身操作技巧、经验水平等主观因素对吊装作业质量的影响,更加安全、高效地完成航天器产品的AIT工作。
1 吊装过程中存在的问题
1.1 特定工序下的吊装问题
在卫星产品装配过程中,某些特定的垂直对接和水平对接吊装工序,对起重机动作距离的控制要求极为严格。
如图1所示,在进行卫星推进舱和载荷舱的合舱(垂直对接)作业时,由于载荷舱内舱板与推进舱承力筒压条之间间隙极小(约20 mm),对起重机升降、平移动作的控制精度要求极高,需要控制在毫米级,否则可能对内舱板与承力筒压条造成损伤。

图1 卫星合舱作业
卫星在吸波室内上DUT转台时,需要通过不断控制起重机吊钩点动升降,来微调卫星前端和后端的高度,从而改变卫星整体水平度,使卫星底面能与转台面平行,记录4个吊钩秤的数值,然后控制起重机小车平移,缓慢贴近转台面,进而顺利完成水平对接作业,图2所示的这一过程的控制精度通常要求在厘米级至毫米级之间。

图2 卫星在DUT转台上进行试验
卫星下DUT转台时,为了确保4根吊带的承力状态(以之前记录的吊钩秤数值为依据)与之前上DUT转台时的状态一致,避免出现连接螺钉承力难以拆下的情况,需控制起重机吊钩点动升降,来调大、调小吊钩秤数值。尤其在即将接近所需的数值、数值变化在个位数时,对点动的精度要求控制在毫米级。
从人员和设备两方面综合考虑,不同水平、经验的操作人员,不同性能、特点的起重机带来了太多不稳定的因素。即使是水平高超、经验丰富的吊装操作人员也难以保证每一次点动升降、平移的距离完全相同,这就为此类高精度操作的安全带来了隐患。
1.2 特殊环境下的吊装问题
真空热试验是航天器试验过程中必不可少的环节,但由于热试验主容器KM6、KM8内部空间的局限性,在航天器进入主容器或其操作平台在主容器内进行拼接时,存在更高的风险性和更小的容错率。天和一号整器,其操作平台外侧与KM8主容器内壁的间距不足2 m,而整器距离操作平台内侧的最小距离不足0.7 m;天宫天舟系列整器,其进入KM6主容器时,整器上突出物距离操作平台内侧最小距离仅约0.1 m,如图3所示。
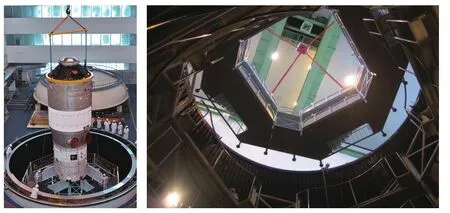
图3 天宫天舟系列整器及操作平台进入KM6主容器情况
此外,吊装人员站在主容器顶端钢平台上进行操作,由于是俯视作业,视线被操作平台遮挡,为操作人员准确判断、调整航天器与操作平台间距离,确保吊装作业安全进行带来不便。
综上所述,在这种空间狭小且视线受阻的情况下,无论是航天器还是其操作平台,一旦起吊中心点没有判断准确,导致起吊后航天器或操作平台位置发生偏移,都将可能直接对航天器造成伤害。
2 起重机自动化控制技术的应用
2.1 国内的应用情况
2.1.1 自动化起重机的划分
目前,起重机自动化控制技术在国内建筑业、工业以及产品运输行业等多个领域都发挥着重要作用,根据工作环境的不同,自动化起重机系统可分为半自动和全自动两种:
1)半自动起重机具备人工、半自动化控制两种工作模式,其可以自动执行一部分工作流,但是在每个工作流待命点均需要人工干预方能继续。
2)全自动起重机具备人工、半自动、全自动控制等3种工作模式,可根据上级指令自动分析工作流,自动执行全部工作任务直至人为干预中断任务执行。
2.1.2 自动化起重机系统组成
自动化起重机对比目前主流的以变频器作为调速装置的传统起重机,就起重机本身结构来说差异并不大,主要区别存在于控制器、软件系统和传感器等方面。自动化起重机系统主要包含了远程控制中心系统、地面系统及机上系统等3部分。
1)远程控制中心系统 用于操作人员进行任务分配、发出作业指令、实施远程操作以及实现视频、语音的实时显示、储存和回放。如图4所示。

图4 远程控制中心系统界面
2)地面系统 通过激光扫描仪、旋转云台和控制器,对指定工作区域内的情况进行扫描分析和精准定位,然后将信息传输至起重机控制系统。如图5所示。

图5 激光扫描系统
3)机上系统 根据传输过来的工作指令,依靠伺服电机、变频器、编码器及PLC控制系统等,实现升降机构的精准动作和运行机构的准确定位。如图6所示。

图6 系统结构图
2.2 在航天器AIT工作中的应用
2.2.1 系统功能的适用性
1)远程控制中心系统适用性 由于航天器AIT厂房内设备的管理模式不同于物流仓储和一般制造工厂,且视频、音频输入和无线传输装置的安装、使用也有悖于现场的保密管理规定,再加上改造成本高、周期长,可能导致起重机长时间无法使用,对科研生产进度造成影响,故远程控制中心系统并不适用。
2)地面系统适用性 由于所吊装的航天器产品的结构相较一般货物结构复杂得多、吊装要求也严格得多,尚不具备仅依靠3D扫描定位后即可保障安全起吊的条件,故地面系统并不适用,仍需要通过人工识别位置、手动调节吊具的方式,来确保吊装作业的安全。
3)机上系统适用性 机上系统是通过PLC系统编程、编码器定位、变频器控制来提高起重机自身的动作精度,从而准确完成工作指令。对于目前航天器厂房内现用的、全车采用变频控制的起重机而言,需要再加装一套PLC系统以及用于定位的编码器。根据测试情况,还需要采用加装齿轮齿条导向轨道或设置位置校正点的方式来避免车轮丢转儿等因素对定位精度的影响。因此,机上系统的可应用性较强,改造实施可行。
综上所述,自动化控制起重机系统并不能完全适用于航天器吊装工作,只需选取其机上系统部分功能对现用设备进行改造,提升设备作业精准性和稳定性,使其能更好地辅助吊装操作人员作业。
改造后的设备类同于半自动化起重机,具备人工和半自动2种控制模式,分别通过2台远程遥控器发布动作指令,2台遥控器间可根据需求随时切换使用。
2.2.2 解决特定工序下的吊装问题
针对前述特定工序下,需要起重机控制的动作精度达到毫米级的问题,可应用机上系统部分功能解决。起重机大、小车运行机构,其运行速度为
式中:n为车辆驱动电机转速,D为车轮直径,i为减速器速比。
起重机起升机构,其起升速度为
式中:n为升降驱动电机转速,D为卷筒直径,d为钢丝绳直径,i为减速器速比,m为滑轮组倍率。
由式(1)、式(2)可知,可通过PLC系统编程和编码器(闭合增量编码器和绝对值编码器)控制起重机驱动电机转速和运行时间,从而控制起重机行走、吊钩升降固定的距离,实现寸动功能,确保操作人员每次操作后,起重机动作的距离精准且固定。目前国内的寸动控制精度可达到1~3 mm。起升机构还需要根据不同吊载质量、不同结构钢丝绳弹性等因素进行调试和测试,来确保寸动精度。高精度的距离控制可有效解决航天器装配过程中的难点问题,更加安全、高效地完成吊装作业。
2.2.3 解决特殊环境下的吊装问题
应用机上系统所提供的准确定位功能,将起重机吊钩指定停放点作为区域坐标原点,并通过LED显示屏实时显示起重机吊钩移动后的坐标位置。利用此功能,可有效解决特殊环境下的吊装问题,具体流程如图7所示。
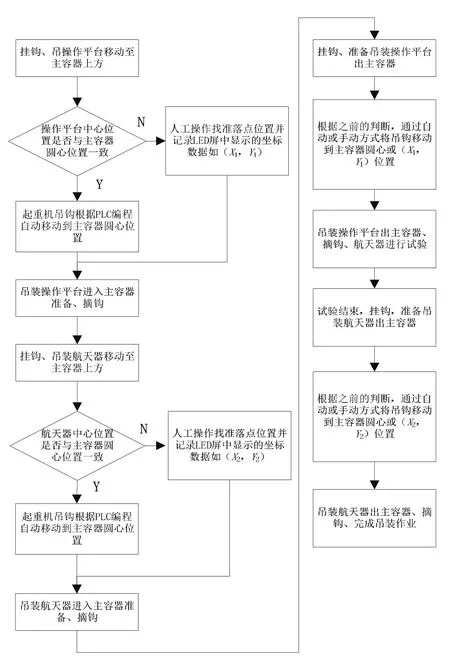
图7 航天器热试验吊装流程图
利用起重机自动化技术的精准定位和实时位置显示功能,辅助吊装指挥及操作人员来确保每次起吊前吊钩的位置与之前的落点位置一致,以保证起吊后航天器或操作平台不会出现偏移、晃动问题,避免了对航天器造成伤害。
在此基础上,可根据航天器不同产品平台结构、突出物位置等,将中心位置及突出物情况一致或相近的归为一类,根据归类情况,通过PLC编程分别设定2号、3号等若干个坐标位置点(吊钩指定停放位置为原点,编号0号;主容器圆心位置编号1号),进一步免去了流程图中需要人工操作找准落点的步骤,实现半自动化控制。
同理,除热试验工作外,对于质测、力学大厅等试验设备位置固定的区域,也可应用上述技术来辅助吊装作业,确保航天器吊装安全。
3 结语
随着制造业数字化、网络化、智能化的不断推进,将会有更多、更好的科技技术接踵而至,我们应不断跟随科技潮流,应用更好的技术手段提升、完善基础设备、设施能力,助力航天器AIT工作的顺利开展。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
锻压装备与制造技术(2021年5期)2021-11-13
科学技术创新(2021年5期)2021-03-17
——编码器
演艺科技(2020年7期)2020-08-13
智能制造(2019年9期)2019-03-23
大陆桥视野(2015年12期)2015-10-28
山东工业技术(2014年9期)2014-05-16