基于北斗3号PPP-B2b信号的精密单点定位精度分析
2021-05-17 10:33黄伦文孟宪伟
大地测量与地球动力学 2021年5期
黄伦文 孟宪伟,2
1 安徽四创电子股份有限公司,合肥市习友路3366号,230088 2 中国科学技术大学计算机科学与技术学院,合肥市金寨路96号,230088
北斗系统融合了导航与通信功能,具备定位导航授时、星基增强、地基增强、精密单点定位、短报文通信和国际搜救等多种服务能力[1-3]。其中,精密单点定位利用PPP-B2b 信号作为数据播发通道,通过北斗3号GEO卫星播发北斗3号系统和其他全球卫星导航系统(GNSS)精密轨道和钟差等改正参数,为我国及周边地区用户提供动态dm级、静态cm级的精密定位服务[4-5]。目前,PPP-B2b已经能够播发有效卫星为C19~C45(C31除外)共26颗北斗3号卫星的精密改正电文。本文利用北斗系统播发的PPP-B2b信号数据,分析其在中国区域的静态和动态精密单点定位精度。
1 PPP定位模型与数据处理
双频PPP数据处理时,通常利用无电离层组合消除电离层一阶项影响,伪距和相位无电离层组合观测方程可表示为:
(1)
如何改正式(1)中卫星轨道、卫星钟差和码间偏差是实现高精度定位的关键和基础。利用北斗广播星历改正时,其改正精度有限,仅能获得dm~m级的定位精度[5]。北斗系统PPP-B2b信号旨在提供高精度的卫星轨道、钟差和码间偏差修正产品,提高卫星轨道、钟差和码间偏差的改正精度,显著提高北斗系统的定位服务性能。利用PPP-B2b改正卫星轨道、钟差及码间偏差方法如下。
1.1 卫星轨道改正
轨道改正信息参数为轨道改正向量δO在径向、切向和法向的分量,联合利用广播星历计算出的卫星位置向量Xbroadcast可计算卫星位置改正向量δX。修正算法如下:
Xorbit=Xbroadcast-δX
(2)
式中,Xorbit为改正后的卫星位置,Xbroadcast为广播星历计算得到的卫星位置,δX为轨道改正数。δX的计算公式为:
(3)
ealong=ecross×eradial
δr=[eradialealongecross]·δO

1.2 卫星钟差改正
钟差改正电文参数是相对于广播星历钟差的改正参数:
(4)
式中,tbroadcast为广播星历计算得到的卫星钟差改正数,tsatellite为改正后的卫星钟差改正数,C0为PPP-B2b提供的钟差改正参数。
1.3 卫星码间偏差修正
由于卫星跟踪模式的不同,各观测值都包含一个与信号跟踪模式相关的偏差。同步处理各频率的各类信号时,首先需要消除该偏差,其修正算法为:
(5)

2 北斗3号PPP-B2b实时产品精度分析
本文选取2020年doy 112~115的B2b改正数产品,以GBM事后最终轨道和钟差产品为基准,分析比较B2b精密轨道和钟差产品的精度,计算方法详见参考文献[5]。表1给出B2b实时产品的轨道在径向(R)、切向(A)、法向(C)差值的RMS值,以及钟差的RMS和STD值。可以看出,B2b产品轨道R方向精度均值为0.07 m,A方向精度均值为0.33 m,C方向精度均值为0.24 m;钟差存在约4~5 ns的系统差,但是STD值优于0.10 ns,能满足cm~dm级实时定位精度需求。
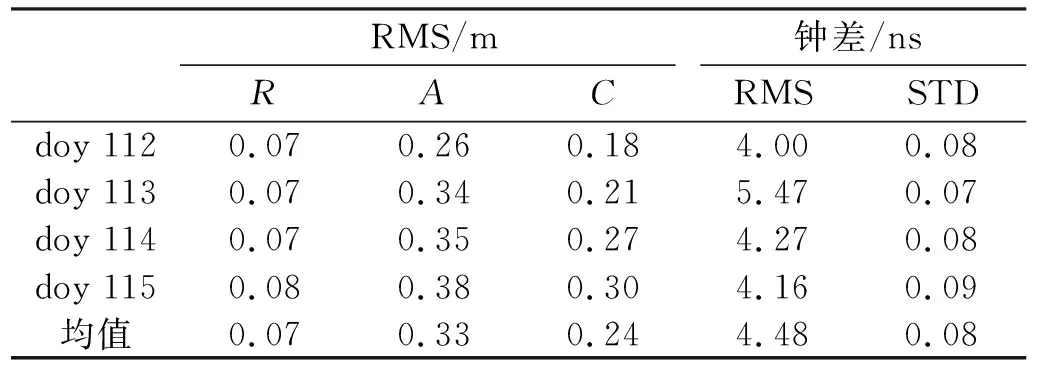
表1 B2b轨道钟差产品精度统计
3 定位精度分析
为验证北斗3号PPP-B2b卫星轨道、钟差及码间偏差产品的服务性能,选取IGMAS中国区域的BJF1、LHA1、KUN1、WUH1、XIA1等5个测站在2020年doy 112~115的观测数据,利用实时收到的北斗3号PPP-B2b电文信息,分别通过式(2)~(4)改正卫星轨道、钟差和码间偏差,采用事后仿实时静态、动态PPP定位精度分析,将定位结果与真值坐标进行比较,其中真值坐标由周解坐标提供。图1为测站分布。
3.1 静态定位精度分析
将各测站数据进行24 h静态解算,比较最终定位坐标结果与真值坐标,分别统计各测站所能达到的定位精度(图2)。
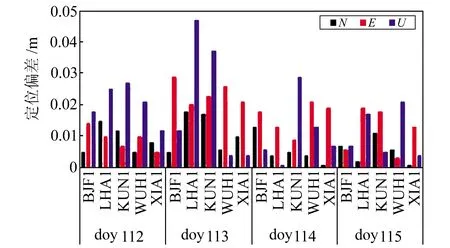
图2 静态定位精度统计Fig.2 Static positioning accuracy statistics
由图2可见,各测站N、E方向定位精度均优于3 cm,高程方向优于5 cm。将各测站4 d的定位精度取平均值,如表2(单位m)所示。可以看出,利用北斗3号PPP-B2b信号提供的精密卫星轨道、钟差及码间偏差产品的静态PPP定位精度可达0.8 cm、1.5 cm、1.6 cm。
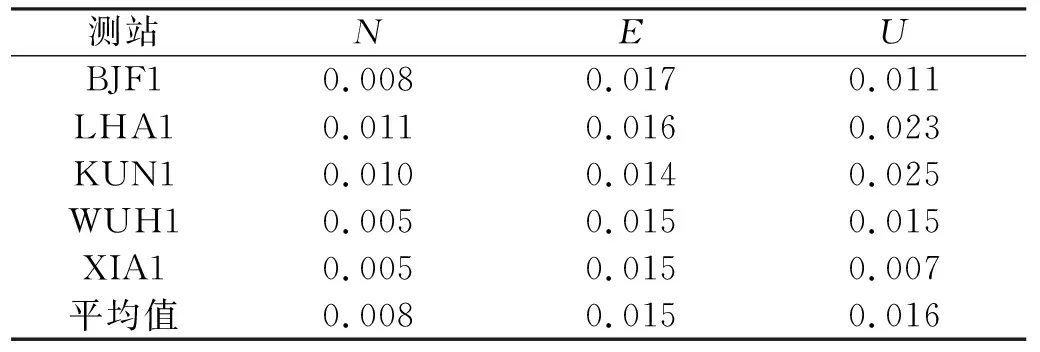
表2 各测站静态定位精度均值
3.2 动态定位精度分析
图3给出BJF1站2020年doy 114动态PPP定位偏差和卫星数时间序列。可以看出,目前在中国区域BDS-3可用卫星数约为7~12颗,动态PPP收敛后N、E、U方向定位精度RMS分别为4.0 cm、5.5 cm和10.8 cm。图4给出4 d内各测站的定位精度RMS统计。可以看出,除BJF1测站外,其他测站4 d内定位精度RMS平面方向均优于10 cm、高程方向优于20 cm,且不同测站没有明显的精度差异,说明不同天北斗3号PPP-B2b信号定位精度稳定,且不同区域的定位精度相当。进一步将各测站4 d的定位精度取平均,如表3(单位m)所示,作为对比,表3也给出了采用GBM事后产品动态定位精度的RMS统计。可
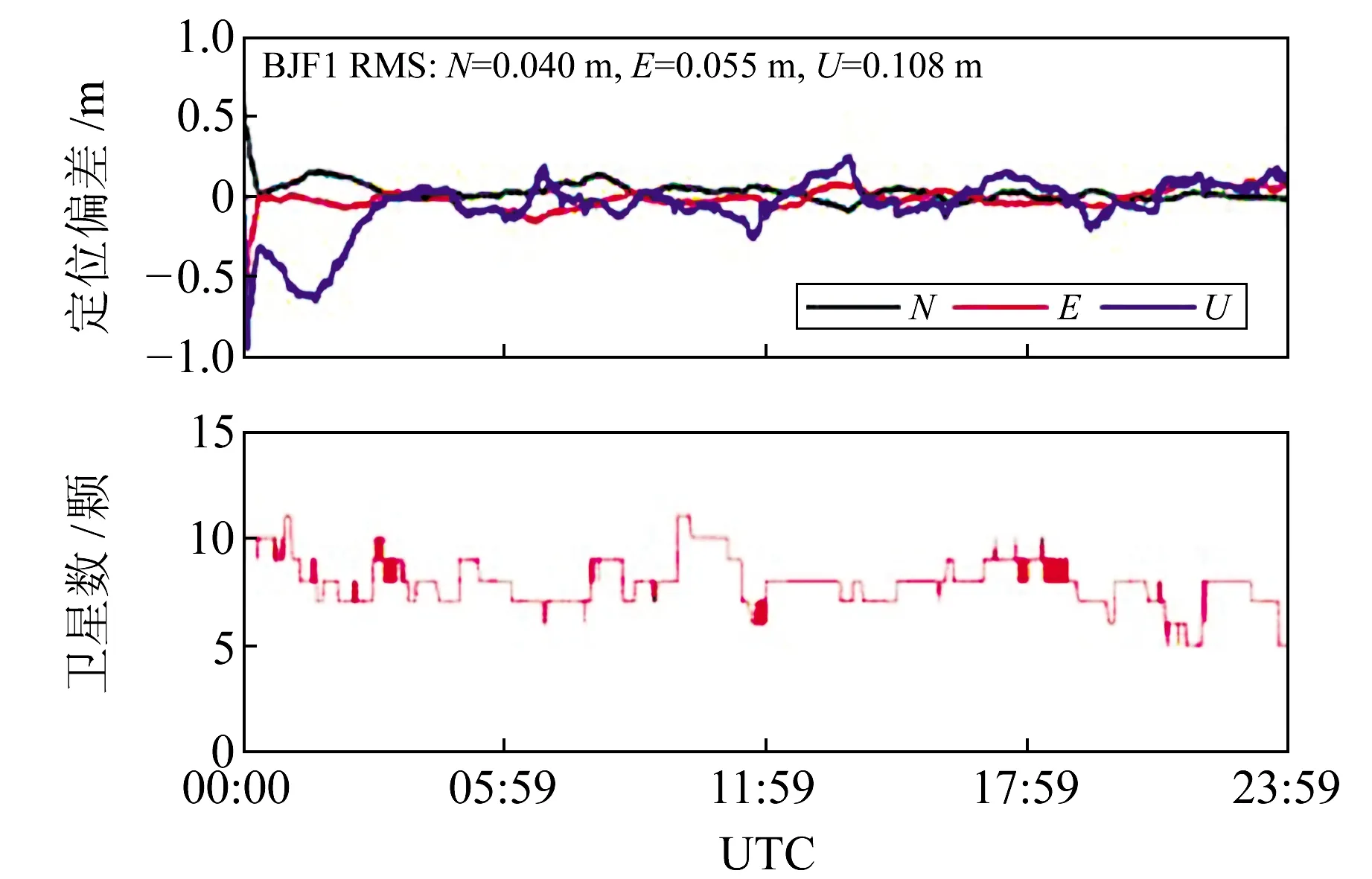
图3 2020年doy114定位偏差及卫星数的时间序列Fig.3 Time series of doy 114 positioning deviation and satellite number in 2020
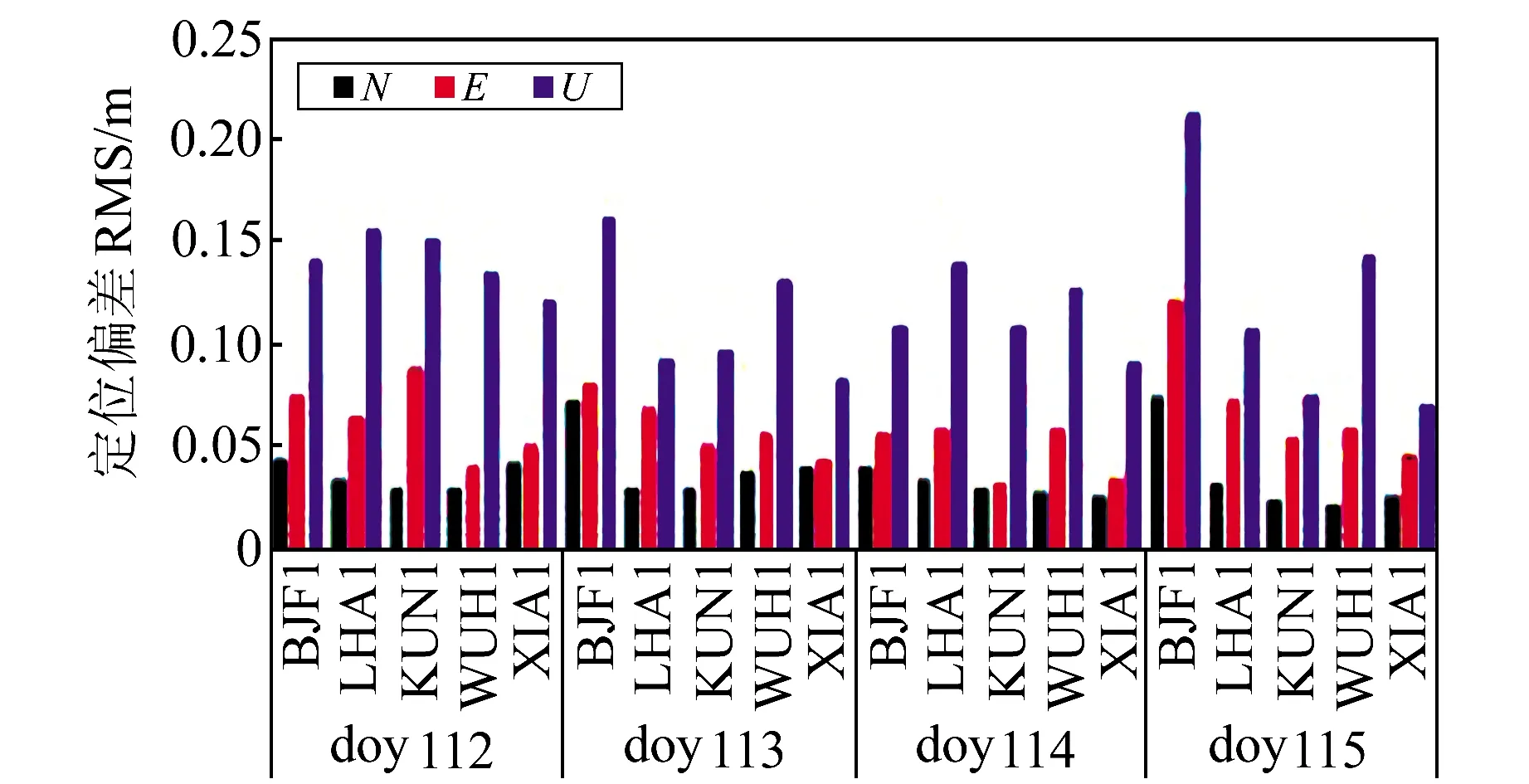
图4 2020年doy112~115定位偏差统计Fig.4 Statistics of positioning deviation during doy 112 to 115 in 2020
以看出,采用GBM事后最终产品,动态PPP定位精度平均RMS在N、E、U方向分别达到2.3 cm、3.3 cm和9.2 cm;而利用北斗3号PPP-B2b信号,动态PPP定位精度N、U方向比GBM稍低,E方向明显比GBM低,N、E、U方向平均RMS分别达到3.6 cm、6.0 cm和12.2 cm。
3.3 收敛情况对比分析
根据北斗3号B2b信号精度指标,本文以平面定位精度优于0.3 m、高程定位精度优于0.6 m所需要的时间作为PPP收敛时间,给出各测站2020年doy 112~115的平均收敛时间(见表4,单位s)。由表可知,B2b约需要0.5 h的收敛时间,除BJF1站外,其他测站的收敛时间比GBM稍长。
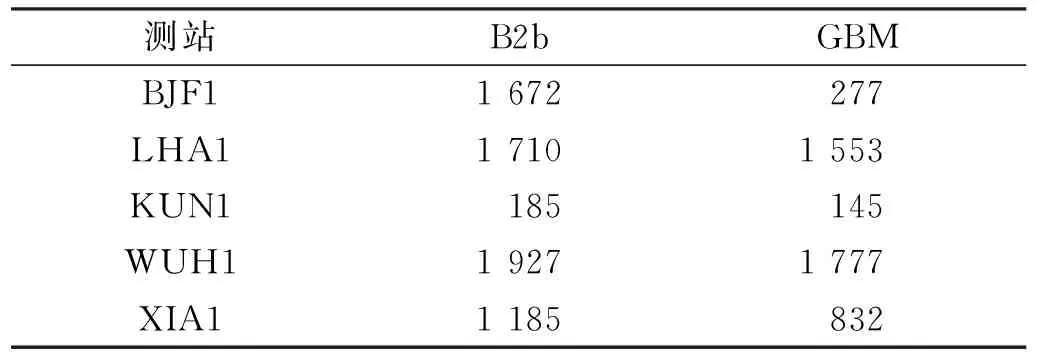
表4 测站收敛时间统计
4 结 语
本文选取iGMAS中国区域的BJF1、LHA1、KUN1、WUH1、XIA1等 5个测站2020年doy 112~115观测数据对北斗3号PPP-B2b信号定位效果进行分析,结果表明,在我国区域内,利用北斗3号PPP-B2b信号,静态PPP定位N、E、U方向定位精度RMS分别可达0.8 cm、1.5 cm和1.6 cm,动态定位精度RMS分别达到3.6 cm、6.0 cm和12.2 cm,实现了静态cm级、动态dm级的定位服务,达到系统设计的指标要求。
猜你喜欢
军事文摘(2023年4期)2023-04-05
地理空间信息(2022年11期)2022-11-26
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
测绘学报(2018年10期)2018-10-26
导航定位学报(2018年3期)2018-09-03
城市勘测(2018年1期)2018-03-15
载人航天(2016年4期)2016-12-01
水利科技与经济(2016年9期)2016-04-22