
基于时域相移技术的结构光三维微纳形貌检测方法
2021-05-17 19:56范松如陈冬晖
光电工程 2021年4期
范松如,范 朦,陈冬晖,赵 青
1 四川欧瑞特光电科技有限公司,四川 眉山 620564;
2 北京北方光电有限公司,北京 100195;
3 电子科技大学资源与环境学院,四川 成都 611731

1 引言
随着微纳器件在智能制造、先进材料和生物医学等领域的广泛应用,微纳检测技术不断更新换代,向着更高精度、更高检测效率的方向发展[1-2]。三维微纳形貌检测技术,通过准确获取微纳器件三维结构信息,不仅能够对微纳器件加工质量进行检测,而且能够通过获取形貌,建立结构与性能之间的直接联系,是开展各项微纳技术研究的基础,也是现代微纳检测技术的核心发展方向[3-4]。
现有的微纳形貌检测技术可以分为光学测量和非光学测量两类,其中光学测量方法以其高精度、高效率、无损伤等优点得到了广泛应用。现有的光学测量方法主要包括激光共聚焦、白光干涉和显微调制度测量等[5-6]。激光共聚焦通过逐点检测光强极值对物体进行测量,其测量精度高,但属于点测量且测量效率低;白光干涉利用物光波和参考光波相干,且白光光源相干长度极短的原理对物体进行测量,具有较高的纵向分辨力,但其存在相位截断等问题,不适合特别粗糙表面结构的测量;显微调制度测量以其高测量精度、高效率和较强的适应性吸引了国内外学者的广泛关注,是目前微纳形貌检测的主流技术[7-10]。
显微调制度测量的基本原理是将DMD 产生的光栅条纹投影到物体表面,由于受到物体表面形貌调制,条纹调制度会相应产生变化,且理论表明,条纹调制度最大值时对应该像素点准确聚焦的位置。通过纵向扫描物体,CCD 同步采集成像图片,进而结合调制度解调算法和峰值定位算法恢复物体三维形貌[11-13]。其核心是对采集图像像素点调制度进行解析,常用的调制度解析技术包括相移技术、Hilbert 变换技术和全局傅里叶变换技术。相移技术[14-15]由于其精度高因而广泛应用于结构光检测中,但其需要采集多幅图像以获取相位信息的调制度曲线,测量效率受到限制;Hilbert变换技术[16]同相移技术类似,在同一位置需采集多幅图像实现测量,测量效率较低且测量系统复杂,影响其测量精度;全局傅里叶变换技术[17]的每个扫描位置只需一副图像即可进行调制度提取,可有效提高测量效率,但其只适用于光滑表面测量,同时傅里叶变换会丢失部分高频信息从而降低测量精度。
微纳器件集成度提高,对器件的形貌测量提出了更高的要求,不仅需要纳米级的测量精度,同时需要较高的测量效率,以实现微纳器件的快速形貌测量,满足其在不同应用领域的使用需求。针对微纳器件形貌测量的技术难题,本文提出一种基于时域相移技术的结构光测量方法,实现了微纳器件三维形貌的快速高精度测量和重构。
相比传统的激光共聚焦和白光干涉等测量,本测量系统将傅里叶变换法和相移技术相结合,实现扫描和相移同步进行的效果,有效地结合了两种方法的优点:将传统形貌检测精度从200 nm 左右提升至10 nm;在保持高精度的同时到达高效率;同时相对于传统的结构光测量,本方法测量系统简单,具有较好的测量适应性,满足不同材质的三维形貌快速测量。
2 理论推导
2.1 测试系统及方法
根据结构光检测原理,测试系统由测试光源、DMD、成像及显微物镜系统、分光镜和CCD 组成,如图1 所示。
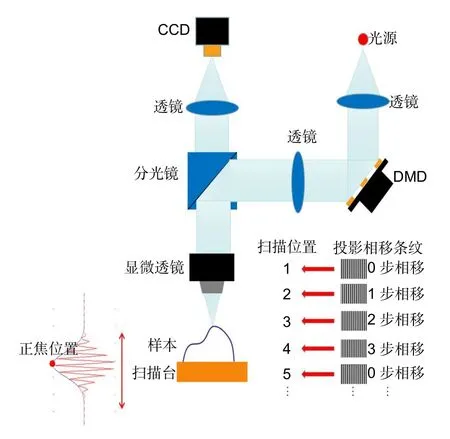
图1 基于时域相移技术测量系统图Fig.1 Diagram of the measuring principle based on time-domain phase shift technology
测试光源经过DMD 后,其空间相位被调制,形成周期性光栅结构光,被调制过的测试光经过筒镜(tube lens1)和显微物镜后垂直照射被测样片,携带被测样片形貌信息的反射光原路经过显微物镜和筒镜(tube lens2)后成像在CCD 上。与传统结构光检测不同,本测试方法在对样片进行扫描的同时,空间光调制器-DMD 对测试光路进行固定的相移控制,在一个扫描位置只需采集一副图像,提高测量效率的同时保证测试系统的精度。
2.2 测试理论分析
根据测试原理,对被测样片进行轴向扫描测量,CCD 采集的一系列图像进行分析,不同位置的像素点其对比度函数如图2 所示。

图2 单像素点纵向光强图Fig.2 Portrait light intensity distribution of a single pixel
图中P(x,y)为CCD 采集到图像中的任意一点像素,K为采集系列图像编号,当某像素点位于焦点位置时其对应图像的对比度为极大值。根据光学成像原理,可计算第K幅扫描图像的像素点P(x,y)位置处的光强为

式中:I0(x,y) 为背景光强,C0(x,y) 为扫描位置K0处的对比度,f0是调制的结构光空间频率,M是相移次数。基于以上分析,对同一像素点在不同扫描图像k中的光强分析为

其中:I0(k)为被测像素点扫描图像k的背景光强,C0(k)为扫描位置k处的对比度,φ为该像素点的一个常量。为获取该像素点的调制度,对光强做傅里叶变化:

其中F(ξ) 为强度曲线不同级次的频谱,如图3 所示。
利用矩形滤波对±1 级频谱进行滤波,然后进行逆傅里叶变化后取其绝对值,可计算不同扫描位置的调制度为
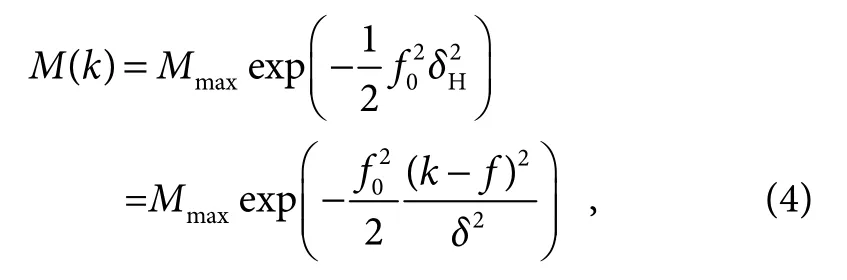
其中:Mmax为调制度的极大值,f0是调制的结构光空间频率,f为显微物镜焦距,δ为测量系统相关常量。由上式分析计算,任意像素点的调制度曲线为高斯分布曲线,CCD 中不同像素点(x,y)对应不同的高斯曲线,且有不同的极值点kmax(x,y)。CCD 图像上不同位置像素对应样片上的位置,可计算出样片高度变化函数为

式中:Δz为扫描步距。通过测量不同位置的高度,完成被测样片的三维形貌测量。
3 实验结果
为研制该测试方法的可行性,搭建了一套检测系统对微纳结构的形貌进行实际测试,系统如图4 所示。
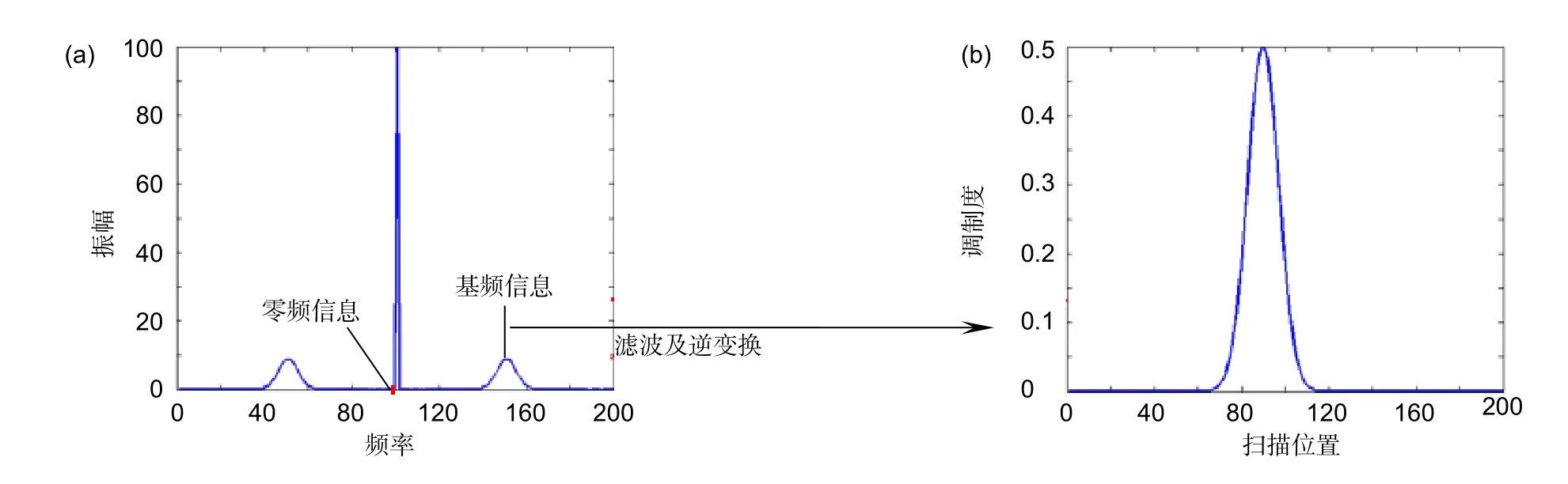
图3 光强信息频谱图Fig.3 Spectrum of light intensity
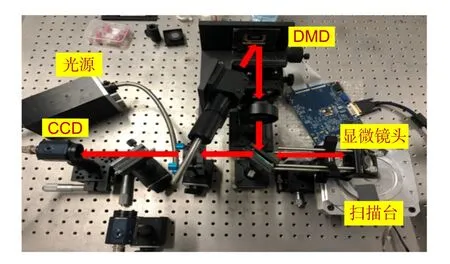
图4 实验系统Fig.4 Measurement system
测试原理:光源出射光经过DMD 后,对其空间位相进行调制,形成特定的结构光经过筒镜1 和显微物镜后垂直照射被测样片;样片放置在压电驱动台上,由驱动器带动驱动台沿测量光轴方向做扫描测量;携带样片表面形貌信息的发射光经过显微物镜和筒镜2后在CCD 中成像从而实现样片形貌测量。本方法的创新在于在压电驱动台扫描测量的同时DMD 对测量光路进行固定相位的偏移调制,利用时域空间的相移技术,兼顾了测量精度和测量效率。
本测试系统中,选用中心波长为580 nm 的白光光源照明系统;DMD 单像素单元尺寸为7.56 μm;使用100×显微物镜,其NA 为0.8,工作距离为3.5 mm;配套使用THORLABS 的TTL200 型筒镜;CCD 像面大小2048 pixels×1536 pixels,单点像素尺寸3.45 μm×3.45 μm。
实际测量时,DMD 分4 步移相,压电驱动器以50 nm 为步距,分80 步扫描测量,扫描范围0~4 μm,一次扫描CCD 共采集80 幅图像,选取部分如图5 所示。
对采集的80 幅图像不同像素位置进行分析,计算不同像素位置的调制度曲线,从而实现三维形貌的扫描测量和重构。
4 数据分析
对测量数据进行分析处理,包括以下:第一步任意选取一个像素点,分析其在不同扫描位置的光强,并绘制其扫描过程中的光强变化曲线;第二步对该像素点的光强变化曲线进行傅里叶变化并进行滤波;第三步对滤波后的信息进行逆傅里叶变换,获取该像素点的调制度曲线;第四步对调制度曲线进行高斯曲线滤波以确定其调制度曲线极值点的扫描位置。
分析不同像素点调制度曲线的极值点,可实现样片的不同位置的高度信息测量,从而实现样片三维形貌重构。
本方法可实现微纳结构的三维形貌快速测量和重构。对设计高度为140 nm 的微结构进行多次测量,测量结果如图7 所示。经过5 次测量结果与实际设计值的对比,本方法绝对测量精度不超过3.9 nm,重复测量精度不超过不超过3 nm,根据3σ原则,本方法的测量精度优于10 nm。

图5 CCD 采集部分实验图Fig.5 Measurement photos obtained by the CCD sensor

图6 实验处理过程图。(a) 原图;(b) 图6(a)的傅里叶变换图;(c) 对6(b)滤波及逆变换Fig.6 Analyzing procedure of measuring data.(a) Original image;(b) The Fourier transform of Fig.6(a);(c) Filtering and inverse transformation of Fig.6(b)
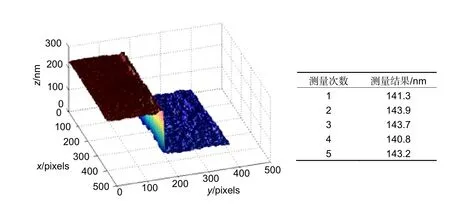
图7 实验测量结果Fig.7 Measurement results
5 结论
针对三维微纳形貌检测的技术难题,本文提出一种基于时域相移技术的结构光检测方法,实现三维形貌的高精度、快速检测和重构。根据测量原理,搭建简易的实验系统验证了该方法的可行性。通过优化系统参数和测试结构,本方法测量精度优于10 nm。在对三维样片进行扫描测量时利用空间光调制器对测量光路进行移相,在保证测量精度的同时提高测量效率。
猜你喜欢
现代电子技术(2021年1期)2021-01-17
计算机与数字工程(2019年1期)2019-03-01
宇航计测技术(2018年5期)2019-01-03
上海大学学报(自然科学版)(2018年5期)2018-11-02
纺织学报(2018年9期)2018-09-23
西部皮革(2018年2期)2018-03-05
电脑知识与技术(2018年35期)2018-02-27
自动化学报(2017年11期)2017-04-04
材料科学与工程学报(2016年4期)2017-01-15
中国光学(2015年1期)2015-06-06
