
钵苗移栽机自动送苗装置研究现状及展望
2021-05-17 12:08肖名涛孙松林
农业工程与装备 2021年1期
方 芹,肖名涛,孙松林,刘 奇,陈 斌
(湖南农业大学机电工程学院,湖南 长沙 410128)
随着我国经济高速发展, 城市化范围扩大,工业、商业、住房占地面积日益增加,人均可耕地面积正逐年减少,农村劳动力流失严重,而市场对粮食和经济作物的需求总量却日渐增加,农作物产量可持续增长成为农业发展的主要难题[1]。目前,我国由于缺乏土地资源与劳动力资源,难以依靠增加耕种面积来大幅度提升作物产量,只能采取品种改良和推广新农艺等方法提高作物产量[2-3]。而作物移栽能够充分利用光热资源,提升复种指数和作物的单产,具有对天气的补偿作用和使作物生长提前的综合效益,是我国提升作物产量的重要手段[4-6]。过去,农民移栽作物时大部分工作环节都是依靠人力完成,导致工作强度大、劳动力需求大、作业效率低、被移栽作物的产量低;目前,国内广泛使用的是半自动移栽机,作业时靠人工送苗,作业效率仍然不高、劳动力需求仍然较大、机械化效益较低,很难达到现代农业规模化生产的目标;未来,全自动移栽机是必然发展趋势。钵苗移栽技术发展的重点是提高移栽效率、节约劳动力资源。随着我国经济高速发展,在农业劳动力大量转移和可耕土地资源紧缺的背景下,传统的农机具已不足以满足现代农业发展的需求,因此研究全自动移栽机成为钵苗移栽技术发展的重中之重。
为了解决自动移栽机人工送苗装置存在的一系列难题,研究钵苗移栽机自动送苗装置是大势所趋。自动送苗装置是自动移栽机的重要组成部分,可将钵苗精准地移到取苗位置,在取苗机构将钵苗取出后自动移动钵苗盘并等待取苗机构进行下一次取苗。送苗装置的设计对移栽机的工作效率、移栽质量以及劳动成本有很大的影响[7]。自动送苗装置对钵苗移栽机作业机械化水平的提高乃至现代农业的发展都具有重要意义。本项目组对国内外现有的钵苗移栽机自动送苗装置进行了研究和分析,以便于下一步开展钵苗移栽机自动送苗装置的设计与试验。
1 钵苗移栽机自动送苗装置的类型
目前,钵苗移栽机自动送苗装置的分类根据取苗装置差异而定,按驱动模式和定位系统的不同主要分为机械驱动及定位、机电气控制及定位、视觉系统定位3种类型[8]。
1.1 机械驱动型送苗装置的特点及原理
机械驱动型送苗装置控制苗盘的横向和纵向间歇运动,其结构主要由凸轮、链轮、往复式丝杠组成。这种纯机械结构的送苗装置对零件的加工精度要求极高,机械结构复杂,对各机构间工作同步性要求高,可能因为制造精度与使用磨损导致产生累计误差,进而影响移栽质量[9]。
1.2 机电气控制型送苗装置的特点及原理
机电气控制型送苗装置由控制电机或者气缸来实现送苗装置的横向和纵向运动,其结构主要由控制系统、电机组成。该类型送苗装置的优点是提高了送苗精度,装置的控制系统与拖拉机的速度配合严密,保证了移栽苗之间株距的稳定性,解决了传统钵苗移栽机取苗和送苗之间的干涉问题,可以适应大田作业环境[10]。
1.3 视觉系统定位型送苗装置的特点及原理
视觉系统定位型送苗装置的结构主要由视觉定位系统、输送系统和控制系统组成[11]。视觉系统的作用是获取图像和分析图像并将获取到的图像以及分析过的图像信息加以处理,如图1所示[12]。将视觉系统应用于钵苗移栽机的自动送苗装置,可以根据识别到的信息智能识别是否为空穴或者坏苗。利用摄像机、图像采集卡和图像处理器等设备搭建视觉系统平台,如图2所示。通过算法运算自动识别空穴或者坏苗后,由处理器处理识别出空穴和坏苗[13]。相对于另外2种类型的送苗装置,这种类型的送苗装置具有智化程度高、作业效率高、作业效果好等优点。机器视觉型送苗装置的识别系统对机器震动敏感,会影响到机器视觉识别的精度[14]。
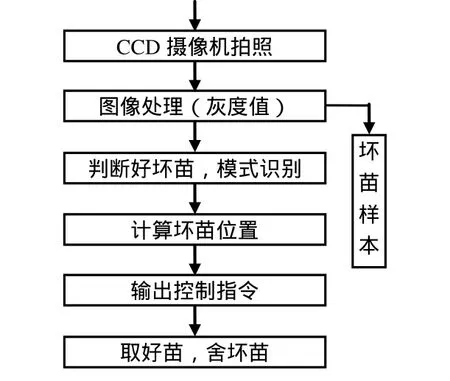
图1 基于机器视觉的坏苗识别系统流程
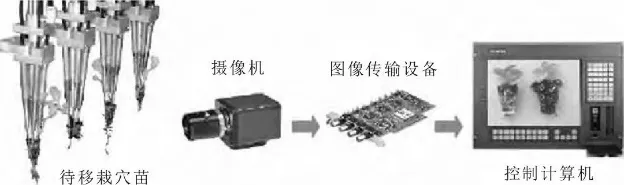
图2 机器视觉监测系统的硬件结构框图
2 国内外自动送苗装置研究现状
国外研究钵苗移栽机较早。20世纪初,欧洲发达国家研究并制造出了适用于蔬菜生产的秧苗移栽机具,这种移栽机具采用人工送苗;20世纪 30年代末至 40年代初期,研制出了送苗装置并逐步代替人工送苗,使送苗入土的过程实现了机械化;20世纪50年代至60年代,研制出了多种不同结构型式的半自动移栽机和用于育苗的土钵制钵机;20世纪 80年代,各种半自动移栽机、制钵机形成了完整的产品系列,并且广泛应用于农业生产。
我国研究钵苗移栽机已有 30多年的历史,目前移栽作业机具仍然以半自动移栽机为主[5]。半自动移栽机的出现,一定程度上有效缓解了农业生产中人工移栽劳动强度大、效率低、用工量大等难题,但仍然存在以下问题:使用半自动移栽机,必须在人工送苗的情况下才能完成作业;人工送苗过程中速度不能太快,工作时间较长,操作者容易疲劳,易造成漏苗现象[6];人工送苗的速度不够快和移栽过程中劳动力需求量过大,制约了钵苗移栽机械的大面积应用[15-16]。研制钵苗移栽机自动送苗装置将提高整个移栽机械的效能和价值[17]。基于钵苗移栽机对农业生产的价值,研究与设计钵苗移栽机是发展现代农业必不可少的工作。而研究与设计自动送苗机构,是钵苗移栽机发展的关键。
2.1 机械驱动型送苗装置
国外研究机械驱动型自动送苗装置的时间较长,研究成果较多,市场上许多钵苗移栽机的送苗装置采用的就是纯机械驱动。目前我国纯机械驱动全自动钵苗移栽机的相关研究较少,很多机械驱动型的自动送苗装置机械结构复杂、移栽效率不高。机械驱动型送苗装置的结构主要由凸轮、链轮、往复式丝杠组成,主要是采用横向与纵向送苗方式。这类送苗装置的机械结构较复杂,零件加工精度和装配要求高。
国外主要的代表机型为洋马公司生产的 PF2R型乘坐式全自动蔬菜移栽机,如图3所示。其送苗装置为横向与纵向送苗,采用纯机械驱动。此送苗装置的原理是:由双螺旋凸轮轴实现横向往复送苗;纵向送苗则是由双螺旋凸轮轴一侧的凸轮带动棘轮,再由棘轮传递到链条,最后带动链条上的钵苗来实现[18]。采用这种送苗方式的还有井关公司生产的PZP-80型全自动蔬菜移栽机,如图4所示。

图3 PF2R型乘坐式全自动蔬菜移栽机

图4 PZP-80型全自动蔬菜移栽机
2011年,KUMAR等[19]研究出一种全自动蔬菜移栽机。该移栽机主要是针对移栽过程多种因素影响钵苗漏栽率与成活率等问题,采用带定时轴、凸轮和离合器等自动送苗机构,可实现垂直方向运送多株钵苗,移栽结果表明该机的钵苗漏栽率较低、直立度率较高、栽植质量良好。
国外纯机械驱动的送苗装置对工件的加工精度要求高,机械机构较为复杂,对各机构间工作同步性要求高,可能会因为制造精度与使用磨损导致产生累计误差,进而影响移栽质量。此种移栽机送苗装置的加工精度要求高,机械结构复杂,且送苗效率较低。
国内其主要的代表机型有浙江理工大学裘利钢等[20]2012年设计的一种横向和纵向送苗机构。此装置缺点是设计复杂,机械结构复杂,精度要求高,但未能测试出高速移栽状态下的控制精度。
河南科技大学金鑫等[21],2016年设计了一种纯机械传动式蔬菜移栽穴盘苗自动输送装置。该装置的取苗速度高达 140株/min,且取苗成功率超过95%,满足移栽农艺要求且远超人工移栽效率。
东北农业大学薛向磊等[22],2020年设计了一种棘轮连杆式钵苗移栽机纵向送苗机构,如图5所示。此送苗装置横向送苗原理是拨杆跟着双向螺旋轴运动,棘轮、连杆等跟着秧箱做往复横向运动。此送苗装置的纵向送苗原理是连杆将动力传至驱动臂,再由驱动臂带动驱动杆运动,驱动杆带动棘轮转动,棘轮驱动送秧链轮转轮齿槽,限定棘轮及送秧链轮的驱动转角,复位弹簧带动机构回复原位。此送苗装置的送苗成功率高达99.17%。相对比国外纯机械驱动的送苗装置,此送苗装置的结构简单,定位准确,且对累积误差有一定补偿作用[23]。

图5 纵向送苗方案
国内纯机械驱动的送苗装置的机械结构由复杂转向简单,降低了工艺制作难度;送苗运动时机构的运动轨迹由复杂转向简单,同时减小了钵苗的损失率。
2.2 机电气控制型送苗装置
机电气控制型自动送苗装置采用电机或者气缸等驱动,精准实现自动送苗。机电气控制型自动送苗装置对取送苗的控制精确,实际作业过程中操作方便,移栽精度高。
国外的主要代表机型是日本井关公司研发的PVHR2-E18型钵苗移栽机[24],如图 6所示。此移栽机采用苗杯输送链形式送苗,苗杯附着在链条上,链轮带动链条进行转动,当苗杯运动到落苗口时,触发开关控制钵苗落下,最后到栽植器,完成送苗。

图6 井关 PVHR2-E18型钵苗移栽机
荷兰飞梭公司生产的 PC-21 温室移栽机,如图7所示。动力来源于气缸和电机。其取送苗装置采用四针式取苗爪进行取送苗,由气缸控制取苗爪的抓取与释放动作。

图7 PC-21 型自动移栽机
以上机械采用机、电、气控制技术的移栽机送苗装置,送苗动作相对简单,适用范围广,移栽效率和成活率较高,稳定性好,但其体积庞大,成本高[25]。
国内主要的代表机型有江苏大学胡建平、杨丽江[26]等 2011年设计的一种乘坐式蔬菜钵苗全自动移栽机。该装置采用了PLC控制电磁阀,驱动气缸实现横向间歇输送穴盘;采用步进电机通过链条实现纵向间歇平行输送。该装置由 PLC控制取苗部件,实现自动取送苗。试验表明该装置的移栽频率达到70株/min,其综合栽植成功率高达96%。
石河子大学的张海芸[27]于2017年设计了实用性较强的玉米移栽机自动送苗装置;马锐[28]于2018年研究出整排夹持式穴盘苗移栽机取送苗装置;李树峰[29]于2019年研制出整排取送苗装置。石河子大学研发的这三类移栽机送苗装置一步步实现了步进电机的精准定位,提高了送苗效率和送苗精度。
西南大学的宋磊[30]于 2020年设计了一种穴盘苗取投送苗装置,如图8所示。该装置应用机电一体化原理,通过步进电机、环形轨道、链条、链轮等实现一系列运动,包括穴苗盘横向及纵向移动、取苗爪斜插式取投苗动作、循环送苗动作。对比荷兰飞梭公司生产的 PC-21 温室移栽机,此送苗装置可以实现稳定高效地取投苗过程,减少穴苗损伤率,提高移栽存活率,同时简化整个机械机构,达到轻简而又高效的目的。但此送苗装置的自动化程度低于荷兰飞梭公司生产的 PC-21 温室移栽机。

图8 送苗装置结构图
国内的机、电、气驱动的送苗装置与国外相比,存在机、电、气成本高,送苗时定位准确率低的问题。通过不断地研究和探索,我国机、电、气定位的钵苗移栽机送苗装置的结构往轻简化发展,送苗定位的准确率提高,从而提高钵苗移栽机送苗的成功率。
2.3 视觉系统定位型送苗装置
视觉系统定位型自动送苗装置不仅可以降低漏栽率提高移栽效果,而且还可以提高移栽效率。视觉系统定位类型的自动送苗装置因其高度的智能化,可以保证植入钵苗的直立度从而提升钵苗的成活率。因为视觉技术在全自动移栽机的应用还处于初级阶段,且对机器震动敏感,价格昂贵,目前还未得到大规模的研究与应用。
国外主要代表的机型是荷兰VISSES公司生产的Pic-O-Mat GR-2700型自动化温室穴盘移栽机,其送苗装置采用视觉定位的方式进行工作,如图 9所示。其控制系统由上位机和PLC组成,通过机器视觉系统实时采集钵苗的图像并处理,根据识别结果驱动PLC控制电机再带动苗盘运动,当到达指定位置时取苗手取苗。机器视觉系统具有较为灵敏的识别功能,可以识别出苗盘的状态,提高送苗精度,加快送苗速度;缺点是机器识别对于移栽装置的振动敏感,影响其识别精度,所以暂时无法运用到大田作业中。
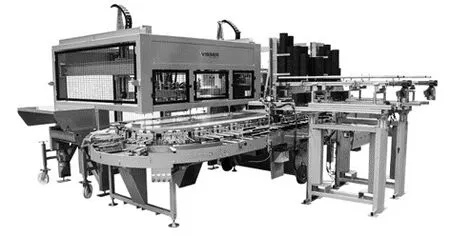
图9 Pic-O-Mat GR 2700型自动化温室穴盘移栽机
ALBERTUS J V V等[31]于2004年研究出一种运用特有视觉识别系统的移栽机。这种移栽机可以同时运送多盘苗盘,并且可以实现补苗和移钵功能,提高移栽成功率。
意大利 Ferrari公司开发了具有机器视觉功能的Futura型全自动移栽机。该移栽机设计了缺苗检测装置,其取苗装置采用成排取苗的方式,钵苗取出后放入投苗装置,使用激光对射式光电传感器检测移栽机投苗装置中是否有钵苗,有苗时投苗装置把钵苗放入栽植机构,无苗时投苗装置直接转过[32]。国外对视觉定位型的移栽机送苗装置研究时间久,发展较快,视觉技术相比国内成熟,智能化程度高。同时,研究的视觉定位型移栽机功能广泛,取送苗定位精度高,有效提高了送苗精度和送苗效率。
国内主要代表的机型有江苏大学魏新华等[33]于 2016年设计的一套穴盘苗全自动移栽机,如图10所示。该装置采用步进电动机驱动实现苗盘横向进给运动,伺服电动机驱动实现取苗机械手纵向往复运动。该装置采用图像采集与处理系统进行取送苗,该系统能够识别苗株是否健康,然后协调控制系统决定是否移栽。此移栽机的取/放苗速度为每行40株/min),在整机单行移栽39.9株/min的平均移栽速度下喂苗成功率达到96.9%。该装置提高了取苗定位精度和输苗柔性度,减少了钵苗基质损失,改善了移栽效果。

图10 移栽机结构示意图
浙江大学王永维等[34]于 2018年设计了穴盘苗缺苗检测系统。该系统对获得的拟南芥穴盘苗彩色图像进行判断,确定穴孔是否有苗。
中国农业大学的张甘等[35]于2020年研究了基于maxIOU算法的快速自动移植器中白菜苗体缺陷的识别。得出结论maxIOU算法在基板和苗区分割中精度高。缺陷识别算法对白菜幼苗的缺陷识别精度高,具有良好的实时性能,可应用于高速现场移植器。
国内视觉系统定位型送苗装置的研究起步晚,但发展较为迅速,与国外视觉系统定位移栽机相比,取送苗精度和智能化程度都较低,缺点主要体现在视觉定位的功能单一,精度低,检测效果一般。
3 送苗装置存在的主要问题
根据对国内外送苗装置现状分析得出,国内学者研究的移栽机送苗装置基本由一个直流电机提供动力,通过机械结构改变动力输出的方向来实现横向与纵向送苗,这类送苗装置机械结构普遍较为复杂。国外机构主要着眼于机械式送苗装置与非机械式送苗装置的研究。机械式送苗装置机械加工精度高,送苗效果好,送苗效率高,但成本过高,在国内暂时无法广泛推广;非机械式送苗装置采用整排送苗的方式实现送苗,这类送苗装置不能进行大田移栽作业。
现阶段我国移栽机自动送苗装置主要存在以下3个问题。
(1) 移栽机自动送苗装置作业效率低。国内研究出的送苗装置普遍存在智能化程度低、机具的精度不高、依旧需要人工参与等问题。
(2) 移栽机自动送苗装置机具结构复杂,成本较高。国内研究出的送苗装置机械结构复杂,加工精度较高,导致成本高,无法大范围推广,商用性能较低。
(3) 移栽机自动送苗装置通用性差。国内研究出的送苗装置基本上都有其特定的工作环境以及工作对象,机具的适应性不佳。
4 对策与展望
(1) 现有国家政策极力扶持农业机械行业,科研工作者要抓住发展的好时机,在国家政策的扶持下,结合我国的基本国情,基于我国现有的农业机械研究基础,大力开展全自动移栽机送苗装置的创新研究,利用先进加工制造工艺,提高零部件的质量,提高全自动移栽机的工作效率和可靠性,降低操作者的劳动强度,减少操作者的劳动时间。
(2) 我国的人均 GDP还达不到发达国家的水平,农民的资金有限,如何简化农业机具,提高农业机具的适应性,让每一个农民都能用上便利的现代农机设备成为现代农业发展的新目标。在研究全自动移栽机时,除了保证移栽机具有高技术含量的同时,还要具备价格便宜、操作便利等优点。政府也可以制定相关的新型农业机具补贴政策,鼓励农民主动购买和学习如何操作新型农业机具。目前,现代农业进入了高速发展的新时代,现代智能化农场成为发展趋势,通过国家政策的导向和农机部门的配合,可以推广规范化移栽种植,促进集约化机械化生产。
(3) 从现代农业发展的趋势来看,研制出可以适用于各种作物移栽的移栽机送苗装置意义重大。新型的移栽机送苗装置将具备高度自动化、智能化等特点,并且拥有较高的自适应性能和通用性,因此视觉系统定位型自动送苗装置的全自动移栽机将成为未来研究的热点。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
英语文摘(2022年4期)2022-06-05
汽车实用技术(2022年7期)2022-04-20
一重技术(2021年5期)2022-01-18
快乐语文(2021年15期)2021-06-15
房地产导刊(2020年11期)2020-12-28
电子制作(2019年15期)2019-08-27
故事大王(2019年4期)2019-05-14
当代陕西(2019年8期)2019-05-09
北京航空航天大学学报(2017年9期)2017-12-18
