基于密集匹配算法的数字高程模型数据优缺点解析
2021-05-16 09:23:48姜阳张俊
经纬天地 2021年1期
姜 阳 张 俊
(1.黑龙江省测绘产品质量监督检验站,黑龙江 哈尔滨 150081;2.黑龙江第二测绘工程院,黑龙江 哈尔滨 150081)
0.引言
基于密集匹配算法的数字高程模型数据(即DEM数据)生产方式,主要是对卫星影像的每个立体像对进行密集匹配,并通过前方交会计算出每个物方点的三维坐标,从而得到整个区域的数字表面模型数据(即DSM数据),再经过人机交互编辑滤波,将高于地面的林地、房屋、桥梁以及临时堆放物等非地面附着物的高程降至地面,最终得到DEM数据成果。其中,密集匹配是指在生产DSM或DEM数据时,为了计算测区每个物方点的三维坐标,从而重建整个测区地形而进行的同名点匹配。
基于密集匹配算法的DEM数据生产近几年从实验走向了大规模应用,主要源于国家建设对于DEM数据的迫切需求,部分区域甚至需要DEM数据的更新周期达到一年以内,“一带一路”国家战略更是需要全球范围内的DEM数据。因此,传统的长周期的DEM生产方式已经无法满足项目需求,基于密集匹配算法的DEM数据生产则可较好地解决此类问题。近年来,由于我国高分辨率卫星影像获取能力极大增强,使得大规模快速生产DEM数据成为了现实。
相比于传统的DEM数据生产方式,基于密集匹配算法的DEM数据生产效率高、范围广、时效性更强、模型表达更加精细,但在某些方面,又有其自身的不足。下面笔者将在各个方面对其优缺点进行详细地分析和阐述。
1.生产效率和覆盖范围方面
基于密集匹配算法的DEM数据生产效率更高。传统的DEM生产方式主要是人机交互立体采集高程点、线,并以此为基础内插构建高程模型。这种方式人工参与度较高,因此对于人工的依赖较大,作业人员的熟练程度和经验的积累对生产效率起着至关重要的作用。根据实际生产周期计算,1∶50000比例尺山地类型的数据生产平均每幅图需要约40-50天的工作量。而基于密集匹配算法的DEM数据生产从自动匹配生成DSM数据到影像粗纠正,再到DEM数据编辑仅需要约12天左右的时间,如若大规模生产平地或无植被区域则效率更高。在基于密集匹配算法的DEM数据的整个生产环节中,从卫星影像立体相对的密集匹配,到通过前方交会计算物方点的三维坐标,再到DSM模型数据的生成,基本可以做到全自动化,因此可以安排在任意时间段进行数据生产,极大地提高了工作效率。此外,对于后续的人工编辑环节,由于是将已经生成的DSM模型作为底图,需要降高的区域仅为林地、建筑区、桥梁等明显的高于地面部分,在沙漠、戈壁等地物稀少的区域甚至无需降高处理,可以将DSM数据直接作为DEM数据使用,因此极大地降低了人工作业的强度和难度,对于作业人员熟练程度的要求也不如传统DEM生产要求那样高。经过测算,项目的平均生产效率相对于传统生产方式整体上提高了5-8倍,可满足在1∶50000比例尺下,全国范围内DEM数据每年一次频率的更新要求。这将极大地提高DEM数据的可应用性,能够对同一区域进行连续不间断的地形监测,对于突发的地形变化,如地震、山体滑坡等也可在短时间内制作特定区域的DEM模型。
基于密集匹配算法的DEM数据生产的成图范围更广。基于密集匹配算法的DEM数据可实现覆盖全球所有的陆地范围(个别影像无法获取的特殊区域除外),并可根据需要在5-8年内对全球的陆地范围进行更新。这个目标能够得以实现主要是源于以下几个技术条件的逐渐成熟:
1.1 我国卫星影像资源获取能力极大加强
近年来,我国自主研发并成功发射了多枚气象、海洋、资源等民用遥感卫星系列及环境减灾卫星星座,资源三号、天绘、高分等影像的大范围获取为高精度DEM成果的生产提供了多重覆盖的数据源,保证了影像数据获取的数量和质量,其范围可覆盖全球,因此生产中可根据实际需要来选择合适的影像源。
1.2 无地面控制测图关键技术的突破
卫星的密集时序化在轨几何定标能够提供任意时间点卫星的坐标以及姿态角等重要参数的信息,这些信息的获取可以极大地减少测绘生产对于地面控制的依赖,并利用大范围的区域网平差技术使DEM成果的高程精度得到了极大提高和保障。此外,全球统一大地基准的确定将全球范围的DEM数据纳入了统一的标准之下,这使得我们的眼光不仅局限于国内,可以将全世界的DEM数据在同一尺度下进行生产、分析、比较,为DEM数据应用打开了广阔的前景。
1.3 众源地理信息快速融合、海量信息在线发布技术
国际海量信息的在线共享,特别是格网宽度为30m的SRTM数据和AW3D30数据获取为我们提供了大量辅助的参考资料,可为密集匹配DEM数据的提供精度参考,也可为空白区域提供漏洞补充。
密集匹配DEM数据生产的范围更广除了以上三个条件的技术支持,也是源于其更高的生产效率,这种方法能够在规定的时间内,使生产范围扩大几倍,可应用性更强。因此基于密集匹配算法的DEM数据生产方式可广泛应用于军用和民用领域,目前,我国主导的“一带一路”战略已开始大规模应用此技术。
2.高程精度方面
DEM成果的高程精度取决于多方面的因素,如影像质量、地形类别等。这里采用的影像源主要是1∶50000比例尺DEM数据生产常用的资源三号卫星影像,影像分辨率为2m,并将对比区域设定为国内同精度区域网范围内的同一区域。基于密集匹配算法的DEM数据在不同的地形类别下,相对于高精度检查点目前所能达到的高程中误差(如表1所示):

表1 基于密集匹配算法的DEM数据相对于高精度检查点的高程中误差
采用传统生产方式的DEM数据相对于高精度检查点所能达到的高程中误差(如表2所示):

表2 传统生产方式的DEM数据相对于高精度检查点的高程中误差
从以上两种方式的高程精度对比中,我们可以看出,基于密集匹配算法的DEM数据在平地区域,精度相较于传统方式要稍微差一些,而在其他三种地形类别中与传统方式的精度基本一致,甚至在高山地还要优于传统方式。这主要是因为密集匹配算法主要是根据影像中不同地物之间的纹理差异来匹配生成高程模型。在平地区域弱纹理区较多,地物特征不明显,出现的粗差点和错误地形也较多,匹配效果不好;而山地影像信息更加丰富,地物特征明显,明暗对比强烈,匹配效果反而要好一些。传统生产方式主要是根据不同视角的遥感影像生成立体模型并进行人工采集,由于视觉原因,地面起伏对高程精度所造成的影响更大。但是由于密集匹配算法的大部分生产环节为自动识别匹配,相对于卫星与地面之间的高差,地面起伏所造成的差异就显得微乎其微了。此外,在1∶10000比例尺下,利用高分七号卫星影像(影像分辨率为0.8m)的试生产实验中,也呈现出了类似的特性。由此可以看出,基于密集匹配算法的DEM数据与传统方式生产的DEM数据相比,在整体上高程精度的差别并不大,且通过后期的精细编辑处理,不同匹配软件和不同匹配参数的调整还可以适当弥补高程精度的不足。
3.视觉效果方面
基于密集匹配算法的DEM成果可以直接通过匹配获取像素的高程值,从而形成最终的栅格数据,而不需要采集传统的高程点线等矢量数据。因此,基于密集匹配算法的DEM成果是连续的不间断的数据,相对于传统方式DEM成果无高程点线的内插区域就会更加真实准确,模型生成的晕渲效果也更加细腻。图1和图2是在Global-mapper软件下显示的DEM晕渲效果对比图:

图1 密集匹配DEM数据晕渲效果图

图2 传统方式DEM数据晕渲效果图
基于密集匹配算法的DEM成果所生成的晕渲效果(如图1所示)能更加连续地表达地貌特征,地形的起伏不会断裂,更接近真实地貌;而传统的DEM成果(如图2所示),则会呈现出梯田状的效果,这是由于在两根等高线之间,传统DEM模型只能呈现同一高程值。在整个模型的视觉效果方面,基于密集匹配算法的DEM成果显然要优于传统方式。
4.表达精细度方面
现阶段,我国在1∶50000比例尺下采用资源三号卫星影像生产的DEM数据格网宽度多为10m。由于基于密集匹配算法的DEM数据的晕渲效果更加连续,因此在部分微地貌的表达中更加真实,特别是对某些高差较小的地貌表达更加细致。可以说基于密集匹配算法的DEM数据后期可以采用任意等高距来生成等高线,而传统方式生产的DEM数据则只能根据生产时的等高距来生成等高线。在同一地区(如图3、图4所示),基于密集匹配算法的DEM数据可清晰地表示出河流的细部形态,而传统方式的DEM数据由于等高距的限制仅能表示出平坦地貌,而没有河流的痕迹。

图3 密集匹配DEM数据河流细部表达
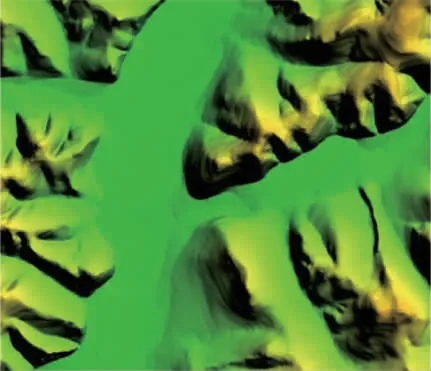
图4 传统方式的DEM数据无河流痕迹
然而,基于密集匹配算法的DEM数据也有其局限性。在有地物遮挡区域,如何判断地物相对高度,并将DSM数据降至真实的地面一直是DEM数据生产中的一个难题。而且在DSM自动匹配过程中,有些高程点匹配至地面,有些则匹配至地物的顶端或中间位置,同种地物点云匹配位置的不同更加大了地物相对高度判断的难度。如果地物相对高度判断不准确,就很容易出现错误的“人造”地貌。

图5 河滩处的坑状地貌
由于相对高度判断不准确,导致林地降高不足,从而使河滩处出现错误的坑状地貌(如图5所示)。而这种问题在某些区域是极难避免的,因为我们不可能针对像素逐个降高处理,只能尽量分割缩小单个的编辑范围,将这种问题控制在可达到的精度范围内。
在山地和高山地区域则分为两种情况。对于山形较大且形态相对完整的区域(如图6所示),基于密集匹配算法的DEM数据可以将地形表现的更加清晰准确,整体趋势和微地貌形态都可以细致地表现出来,总体能够达到优于传统1∶50000比例尺成果生产方式等高线的要求(如图7所示):

图6 形态完整的大型山体地貌影像

图7 密集匹配DEM生成等高线(蓝色)与传统方式DEM生成等高线(红色)对比
而在破碎地貌区域,基于密集匹配算法的DEM数据则体现出了其局限性。破碎地貌,顾名思义,是山体在常年的风化作用下,形成的如刀削斧劈般纵横交错的极端破碎地形(如图8所示),其特征是小型的沟谷或山脊等微地貌形态较多,一般谷底宽度不超过20m,为实际生产带来了巨大的编辑工作量。

图8 破碎地貌影像
根据生产实践的经验来看,一般沟谷和山脊宽度至少需要达到30m才能够完整、准确地表达出地貌特征。因为栅格数据生成的点云高程取值在像素的中心位置,同一像素范围内高程值一致,因此仅有一列或两列点,大部分点位会落在山坡位置,无法准确地落到谷底地面,山脊也类似。
由于破碎地貌山体两侧冲沟等细部地貌较多,且沟谷和山脊较窄,无法达到30m宽度的要求,因此DEM模型仅能适度表达出整体的地形趋势和地貌特征,而无法准确表示出谷底高程(如图9所示):
而传统DEM数据在人工立体采集的生产过程中则可以根据人为判断适当夸大地貌特征,对等高线进行微加工,从而使微地貌的特征更加明显(如图10所示)。通过对比发现(如图11所示),部分宽度在30m以下的沟谷,基于密集匹配算法的DEM数据无法体现出来,生成的等高线趋于圆滑,微地貌丢失,而传统DEM数据则可以根据人工夸张表示把微地貌特征表现出来。

图9 密集匹配DEM生成等高线(蓝色)与影像套合

图10 传统方式DEM生成等高线(红色)与影像套合
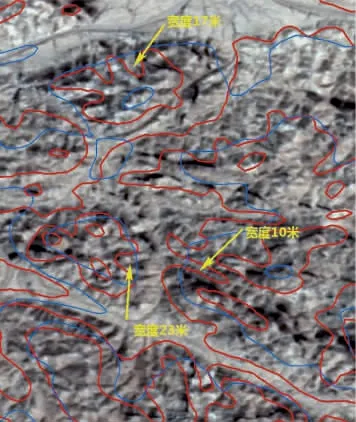
图11 密集匹配DEM等高线(蓝色)与传统方式DEM生成等高线(红色)差异对比
5.结束语
相比于传统的DEM数据生产方式,基于密集匹配算法的DEM数据在生产效率、范围以及视觉效果方面的优势明显,在高程精度对比方面则略低于传统方式,而在地形表达的精细度方面,除几种特殊情况外,则要强于传统方式。由于其在生产效率上的巨大优势,可极大地提高数据更新频率,扩大数据生产范围,现阶段的DEM数据生产基本上都开始采用此种方法,可以说基于密集匹配算法的DEM数据生产方式已经发展到较为成熟的阶段。近几年,在大范围更新生产DEM数据的项目中,基于密集匹配算法的DEM数据生产方式已成为主要的技术手段。随着更高分辨率影像源的使用,DEM数据格网宽度将进一步缩小,地貌表达将更加准确、精细,而随着技术手段的不断优化,其效率也将进一步得到提高。
猜你喜欢
今日农业(2021年9期)2021-11-26 07:41:24
英语文摘(2021年2期)2021-07-22 07:56:52
当代陕西(2020年23期)2021-01-07 09:24:44
广东教学报·教育综合(2019年87期)2019-09-10 07:22:44
测绘通报(2019年1期)2019-02-15 04:56:06
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
地理教育(2016年10期)2016-11-09 00:32:53
中国质量与标准导报(2015年2期)2015-02-28 22:27:22
全球定位系统(2015年4期)2015-02-28 12:38:13
浙江国土资源(2014年5期)2014-04-28 09:04:19