
新型地铁列车自主定位及主动防护系统研究
2021-05-13 07:57:58蒋先进范建伟蒋淮申
铁路通信信号工程技术 2021年4期
蒋先进,范建伟,蒋淮申
(中铁电气化局集团有限公司,北京 100036)
1 列车定位系统现状
目前,由于地铁无法使用GPS 或北斗等卫星定位系统,地铁列车定位和超速防护依靠轨旁设备和车载ATP 设备,只有获取线路上全部列车的位置、速度信息,才能进行列车行车许可和移动授权的计算,列车的定位和移动授权计算完全依赖轨旁设备,信息传递复杂、成本较高。且列车对轨道上的障碍没有直接的安全检测和防护方法,在轨道上出现障碍或人工驾驶出错等意外状况时无有效技术手段防止列车事故发生,行车安全无法得到保证,现有地铁列车定位系统如图1 所示。
车载设备主要包括应答器接收设备、编码里程计、多普勒雷达、数据处理设备(ATP)。
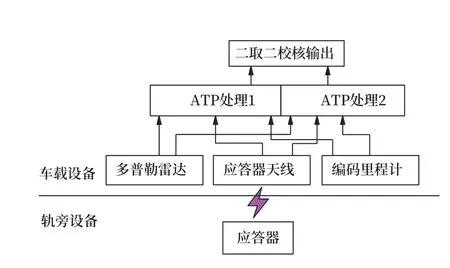
图1 现有地铁列车定位系统Fig.1 Existing metro train positioning system
轨旁设备主要是应答器。应答器安装于轨道旁边,位置固定,为列车绝对定位依据,当列车通过时应答器会自动发送定位报文,根据报文内容不同和实际列车定位要求,分为出库应答器、区间运行应答器、进站应答器、停车到位应答器等。
编码里程计安装于列车轮轴上,车载ATP 通过对即时速度进行积分(或求和)获得列车的运行距离,因速度传感器存在较大误差,列车需通过轨旁应答器后对速度上报的定位信息进行重新标定。
这种严重依赖于轨旁设备的定位模式,导致目前地铁列车建设难度大、施工过程繁琐。在列车交付运营后,故障率高且维修难度大,同时由于应答器原理、报文等不同,使相同城市的不同线路之间地铁列车很难互联互通。
2 列车防撞系统现状
目前地铁列车的防撞方式主要分为主动防撞和被动防撞。主动防撞基于定位和车地通讯,每辆列车通过自身定位系统感知行驶位置并上报控制中心,中心通过对列车行驶的控制调度,将后车与前车之间保持在安全距离。主动防撞仅能系统正常工作时避免发生列车追尾事故,而无法探测其他障碍物。
被动防撞基于列车头结构设计,目的是在发生碰撞之后使产生的危害最低,无法避免碰撞事件的发生。
3 新型地铁列车自主定位和主动防护系统
以新一代地铁列车控制系统应用为背景,遵循多源定位信息融合、差异化设计的原则,系统架构采用三裕度设计方案,实现高可靠、高精度的地铁列车自主定位和主动防护系统。
新型地铁列车自主定位和主动防护系统由车地通讯设备、时钟同步数据处理设备、惯导设备、视觉设备、雷达设备和电源变换装置组合而成。地铁列车自主定位和主动防护系统组成如图2 所示。各组成部分的功能如表1 所示。
主要研究内容:基于弱耦合关系下的多源定位信息三裕度系统架构;高精度系统时钟同步及多源数据处理技术;基于自修正技术的惯性导航高精度自主定位技术;地铁环境低光照条件下二维码信标准确识别及高精度测距技术;地铁环境下雷达避障信号高精度采集技术。
3.1 基于弱耦合关系下的多源定位信息三裕度系统架构研究
地铁运行涉及公共安全和人身安全,其运行安全性和可靠性尤为重要。作为地铁列车运行位置的感知、检测、汇总、上报的列车自主定位系统,上报的位置精度、准确度以及通讯链路的实时性和可靠性是影响列车自动驾驶成败的关键因素之一。
系统在研制之初,即制定了三裕度的系统架构,确保全系统在一度故障下列车不存在涉及功能安全的故障隐患。同时为防止三裕度系统中共因失效导致整个系统工作异常的问题,提出了差异化设计的思路,采用惯性导航、视觉定位、雷达避障的3 种不同原理、不同特性的定位方式,避免相同原理和特性的定位设备造成的共因失效。此外,为了避免定位精度在系统内传递过程中出现逐次放大的问题,采用一种基于列车运行全过程定位任务划分的多源定位信息弱耦合技术,减少各源定位数据的相互交联,逐层解耦、顶端融合,防止定位精度传递过程中的放大问题以及下级设备失效对上级设备定位精度的影响。
3.2 高精度系统时钟同步及多源数据处理技术研究
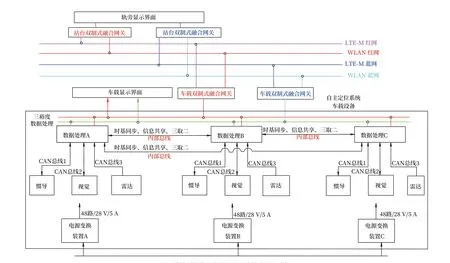
图2 地铁列车自主定位和主动防护系统组成框图Fig.2 Block diagram of metro train self-positioning and active protection system composition

表1 地铁列车自主定位和主动防护系统功能Tab.1 Metro train self-positioning and active protection system functions
自主定位系统内部采用的总线形式为“命令应答式”,即作为顶层设备的时钟同步及数据处理设备以额定时间间隔依次向多源定位终端发送命令字,各终端设备依次上报“当前”检测的列车位置数据,时钟同步及数据处理设备对多源定位信息数据进行融合并上报车载ATP。在列车运行的情况下,若三裕度时钟同步及数据处理设备在进行定位信息采集时,每个裕度发送的命令字时刻不统一,则得到的定位数据必然离散,所进行的后续融合处理必然毫无意义。
为了解决三裕度系统时钟高精度同步和多源信息处理的问题,研发团队开展了基于IEEE1588 亚微秒级PTP 高精度时钟同步方法研究、时钟同步硬件单元模块设计、三冗余节点主从选举算法研究、高速数据处理硬件单元模块设计研究等相关技术研究,实现了三裕度系统时钟亚微秒级同步。
3.3 基于自修正技术的惯性导航高精度自主定位技术研究
由于地铁环境因素,地铁列车在隧道内无法使用GPS 或北斗等卫星定位系统,因此采用惯性导航来解决站间地铁列车的定位问题,即地铁列车在站间行驶时主要依赖于惯性导航为主以明确列车当前位置,辅助于雷达避障。众所周知,惯性导航技术在工作初始,导航精度较高且满足系统使用要求,但随着时间的增加,惯导内部的陀螺仪会随时间呈现随机漂移,导致导航精度会急剧劣化。
为进一步提高惯导自主导航的定位精度,同时对比传统军工行业对惯导的使用要求,并结合地铁运行特点采取如下措施以提高惯导自主定位精度。
相对于导弹、火箭、飞机等应用背景,地铁列车具有低速、长航时,且间歇性到站停车的特点,针对该应用背景,采用零速检测及修正技术,确保惯导在到站停车时定位精度不发散。
相对于导弹、火箭、飞机等应用时需得到载体的航向、俯仰、横滚等导航参数,地铁列车仅具备沿轨道方向(纵向)的位置变化,垂直轨道方向(横向)和高度方向变化较小,因此,采用运动约束修正技术,进一步提高惯导自主导航定位精度。
惯导在导航过程中,瞬间出现较大的角动量对导航精度影响较大。根据调查,目前地铁列车最小转弯半径为125 m,且在列车转弯过程中时速一般小于30 km,不存在武器系统或飞机出现的瞬间较大角动量扰动,因此,通过优化惯导的硬件配置,提高惯导采样速率,优化采样算法,通过试验合理设置角动量采样阈值,进一步提升惯导自主导航定位精度。
3.4 地铁环境下二维码信标准确识别及高精度测距技术研究
惯性导航的原理是通过惯性器件对时间进行二次积分得到载体的位置信息,为了体现差异化设计,研发团队采用视觉定位系统作为辅助完成地铁列车自主定位系统的研制。视觉定位的原理是通过双目视觉采集设备,根据成像点距离和双目之间的焦距即可计算出双目采集设备距离目标成像点的距离,与惯导定位原理不同。
视觉设备双目测距原理如图3 所示。以列车行进方向左边的二维码信标为例,定义车头左右摄像头水平间距为T,两个呈像点之间间距为I,摄像头焦距为f,因此车头距离二维码信标水平距离处的距离D如公式(1)所示。

基于距离信息的基础上,系统的光学系统还能完成列车速度的实时计算,假定在时刻T1,列车距离某一路段的二维码标识为D1,T2时刻,列车距离该二维码标识为D2,此时列车在该时段内的平均行进速度如公式(2)所示。
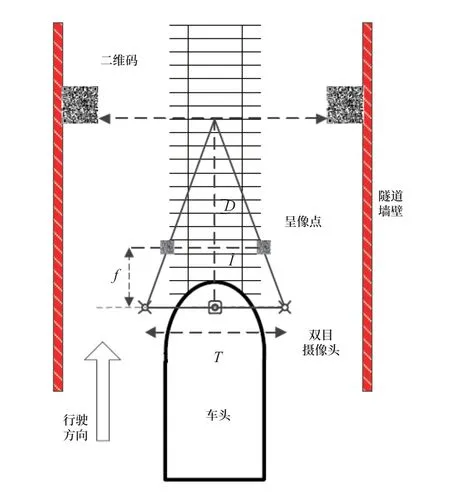
图3 双目测距原理Fig.3 Principle of binocular ranging
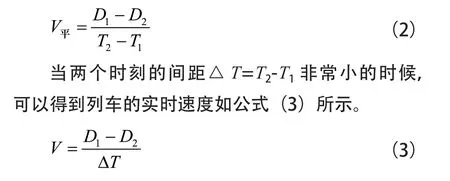
其中V即为列车的实时行进速度。
由于地铁环境中,光照条件差,可视范围小,为确保二维码信标识别的准确性和及时性,研发团队开展了如下研究。
1)低光照条件的二维码准确识别技术
隧道低光照条件下,通过图像增强、从画面中定位二维码,以完成后续测距计算。此外,由于二维码图像可以只由两种不同的颜色进行区分,因此在实际的设计过程中,采用对比度比较好的颜色进行区分。同时,为了增强识别效率,选用反光涂料以及对比度明显的颜色完成二维码实际绘制。
2)高可靠距离测量技术研究
利用双目摄像头的视觉差实现双目视觉测距,并确保测量精度达到规范要求。
3)运动条件下的图像识别处理技术研究
在地铁列车运动过程中,对图像的清晰度会有很大的影响。运动速度越快,在相同快门时间内,同一目标在画面中运动距离越大,这对识别二维码及测距都会产生负面影响。
当车辆在30 km/h 的时候,通过采用帧率较高的摄像头来增大图像的采样,同时通过缩短二维码的解码时间,并在图像比较模糊的情况下通过图像的修正来尽可能还原图像,达到识别效果,而提高识别二维码的进度,便能够进一步提高距离测算。
车辆在5 km/h 以下时,由于车速较慢,识别二维码的距离精度相对较高,准确引导的过程可以通过逐渐增加二维码的布放来进一步加强。
4)图像处理性能优化
传统的图像处理技术时间开销较大,难以在处理板有限的资源条件下完成计算。研发团队经过对处理算法进行优化(包括图像增强,目标识别,二维码解码,距离测量几个部分),能在较短的时间内完成二维码的图像处理、解码和测距。
5)二维码设计方案
不同的二维码编码方案各有其实用场景。常见 的 二 维 码 方 案 包 括:QR 编 码、PDF417、DataMatrix 等,研发团队经过不断探索,选定了一种可靠、适用的编码方案。
此外,经过对编码进行适当的加密处理后,通过其他设备无法读取该二维码或解码后无法解析其含义。
6)测量可靠性问题
研发团队从以下4 个方面着手提高测量可靠性:
编码可靠性:经过现场验证,本系统在25%遮挡情况下可识别;
防止伪信标:连续布放的信标ID 为一个连续单调递增的序列,当新获取的序列值和跨越的距离值之间不匹配时,即可判定该信标为伪造或错放。
针对信标的丢失问题:系统通过一次性部署两个以上的相同二维码解决。如果一个损坏,另一个还可以使用。而假定两个都丢失的话,还可以采用按照升序的方式将后续的二维码不间断进行识别和检测。
连续布放信标:在连续的测量区段,按一定间隔连续布放二维码,确保能够及时有效地连续提供位置信息。
3.5 地铁环境下激光雷达避障信号高精度采集技术研究
地铁列车在行驶过程中,如遇轨道内有障碍物(车、人、危险物等),不加以识别检测,将对列车的安全行驶造成很大的影响。激光雷达用于复杂地铁环境对于障碍物识别检测的任务十分契合,经过现场不断验证,最终本系统选用激光雷达作为轨道内识别检测障碍物的解决方案。激光雷达设备主要用于地铁列车前方障碍物的识别检测,从而对控制车速、保障乘客安全起着举足轻重的作用。
根据地铁列车应用背景,开展了如下的研究内容。
1)激光雷达模块远距离高分辨率测量
根据地铁列车行车实际场景,列车典型速度为80 km/h,此速度下地铁列车的制动距离为215 m,即激光雷达需要有至少215 m 的有效测量量程,且雷达模块能在200 多米无误地识别出前方障碍物,做到不漏检、能识别,如图4 所示。
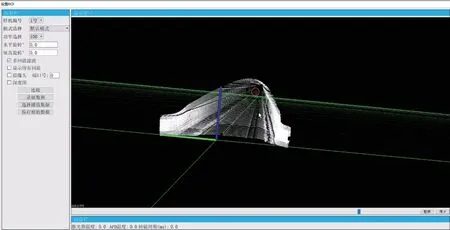
图4 地铁列车雷达模块在地铁隧道中200 m外探测靶板实测Fig.4 Actual measurement of radar module of metro train by detection target board 200 meters away in metro tunnel
2)场景内非目标物分辨/剔除,防误报
列车在隧道内部行进空间内行驶,激光雷达探测单元将视场内的所有目标物扫描出来并输出,为准确识别目标物,将隧道内的其他固定设施如隧道壁、铁轨、地面等剔除;只保留列车行进区间内的非固定目标物作为信号给到系统,如图5 所示。
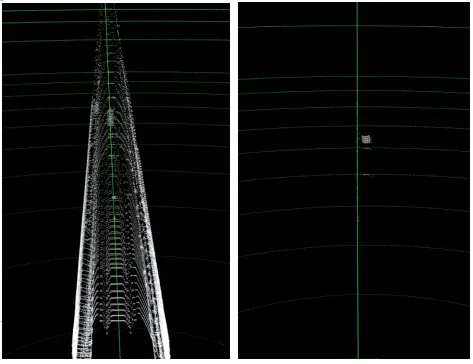
图5 地铁列车雷达模块原始点云图和ROI设定Fig.5 Original point cloud image and ROI setting of metro radar module
雷达模块连续5 次运行周期检测到目标后启动报警系统,以防止误报。
4 新型地铁列车自主定位及主动防护系统技术优势
4.1 列车自主定位
在应用列车自主定位系统时,惯导系统可以实现速度测量,实现列车位置实时自我定位,相比于传统的速度传感器具有更高的精度,通过特有二维码图标测距方式在列车进站时匹配车载VOBC 预存的地图配置,确认图标所对应的绝对位置进行精准定位校核,实现不依赖轨旁轨道电路或应答器的列车自主定位。
采用惯导和图像实现列车自主定位,可以取代传统的速度传感器和应答器的技术方案,具有精度高、工程施工灵活等优点,奠定列车自主智能运行基础。
4.2 列车前方障碍主动感知
采用激光雷达感知列车行进前方的路段环境,将点云数据作适当运算处理后,在各种路况下准确获得前方轨道上方而非隧道墙面的障碍物信息,不依赖定位和中心控制,不仅能避免发生列车追尾事故,还能探测人员、物体等其他各类障碍物,实现列车主动防护。
5 结束语
新型地铁列车自主定位及主动防护系统中包括惯性导航子系统、雷达和视觉采集子系统,该系统可准确定位车辆位置和探测前方障碍物,行调与司机通过轨旁和车载显示终端实时掌握列车所在里程信息、前车及障碍信息。当前后车距离小于安全追踪距离或探测到有障碍物时,本系统会给予司机警示并实时上报列控系统相关防护信息,司机未在规定时间内采取制动措施时列控系统将实施紧急制动,防止或减轻车辆撞击事故发生,保证列车和乘客的安全。
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:48
童话世界(2020年32期)2020-12-18 18:15:41
铁道通信信号(2020年9期)2020-02-06 09:15:22
测控技术(2018年2期)2018-12-09 09:00:56
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
学生天地(2017年10期)2017-05-17 05:50:46
铁道通信信号(2016年4期)2016-06-01 12:10:19
儿童故事画报·发现号趣味百科(2015年10期)2016-01-20 01:05:11
计算机工程(2015年4期)2015-07-05 08:28:57
