
红外道路图像的消失点检测算法
2021-05-13 07:16:28陈澄任益枚
现代计算机 2021年8期
陈澄,任益枚
(1.四川大学计算机学院,成都610065;2.四川大学信息化建设与管理办公室,成都610065)
0 引言
由于热红外图像具有较清晰的夜间可视性,近几年受到了各个领域的广泛应用,特别是车载红外的运用为驾驶人的夜间行驶提供了更高的安全保障。同时随着智能驾驶车辆的快速普及,道路检测算法也成为了计算机视觉中一项重要的研究内容,常见的道路区域检测方法几乎是基于可见光图像的,且主要关注具有明显道路边界和车道标记的结构化道路[12-13],但由于红外道路细节缺失,且纹理信息较弱,常规基于可见光的算法在红外图像上表现不佳。所以,提出一种针对红外道路图像的道路检测算法非常重要。消失点作为道路图像的基本特征,已被广泛应用于道路检测中,在红外道路中使用消失点作为约束进行检测可以大幅度提高检测性能,本文主要关注从道路图像中估计消失点。
大多数现有的消失点检测算法主要分为四个类别:一是基于空间变换的方法,基于空间变换的方法[1-2]使用空间变换技术(例如高斯球体映射和级联霍夫变换)来检测消失点;二是基于边缘的方法[3-4]直接检测直线特征以找到一组消失点;三是基于区域的方法[5-6],搜索相似的全局结构和重复模式(例如墙壁、门和窗户)以定义消失点的位置;四是基于纹理的消失点检测方法,Rasmussen[7]应用一组多尺度Gabor 滤波器,选择具有最大响应的滤波器对应的方向作为每个像素处的纹理方向,然后,根据每个点的方向进行投票,票数最高的位置被视为道路的消失点,但该算法更倾向于偏爱图像上部中的点。为了解决文献[7]中的硬投票方案的缺点,Kong[8]提出了一种软投票方案来提高准确性。Moghadam[9]提出了一种有效的方法来估计纹理占主导地位的方向,只用四个定向滤波器和一个加权投票方案来检测消失点,但当图像具有复杂的道路背景时,这些方法效果不佳。Yang[10]设计了一种自适应纹理描述符WOD,能够在保留道路线索的同时消除噪声,但该算法容易收到图像中如阴影等干扰纹理的影响。
由于可见光图像较红外图像具有更清晰的纹理细节,上述算法对于可见光道路图像的消失点检测具有较好的效果,但是对于红外道路图像而言效果并不好,本文针对红外图像纹理不清晰的特点,提出了一种新颖的基于纹理的消失点检测算法,实验结果表明,本文提出的算法在红外道路图像中取得了比较精确的检测效果。
1 算法实现
1.1 基于Gabor的纹理方向计算
本文使用Gabor 滤波器计算每个像素的纹理响应方向,Gabor 滤波器作为估计局部纹理方向的最佳滤波器之一,可以准确地估计每个像素的局部主导方向,并且已广泛应用于例如指纹分类与头发捕获等实际应用中[10]。方向φn和径向频率为ω的二维k×kGabor 核g为:

其中(x,y)=( 0,0 )代表滤波核中心,a=xcosφn+ysinφn,b=-xsinφn+ycosφn,其中σ和c是常量。
为了估计图像中每个像素的主导方向,本文使用36 个预定义方向(0°,5°,…,175°)的一组Gabor 滤波器与图像进行卷积运算。Gabor 能量响应度Eφn( )p定义为复数滤波器响应的幅度,如下所示:


1.2 消失点检测
1.2.1 消失点投票方案
获取了图像像素的纹理主方向后,为了减少计算量,本文首先根据方向响应强度对投票区域进行了筛选,将最大方向响应强度小于一定阈值的投票像素点定义为弱纹理像素点,该类像素点极有可能出现纹理方向检测错误的情况,对正确消失点的投票过程产生较大干扰,同时还根据简单的垂直特征检测方法剔除掉具有垂直特征的区域:由于Gabor 算子计算的是像素点的局部纹理响应方向,具有离散性,无法判断区域内是否具有垂直物体,所以为了能够最大限度的排除掉垂直特征,本文首先使用Canny 边缘检测算法对图像的边缘进行检测,根据检测结果,遍历边缘图像中的每一个像素点,设置以该像素点为底边中心点的一个长方形区域,该长方形区域的竖直长度为H,水平宽度为W,若在边缘图像中的某一长方形区域中,边缘像素点的数量超过一定阈值,则判断该区域为垂直区域。在剔除掉所有干扰区域后再构建投票区域。
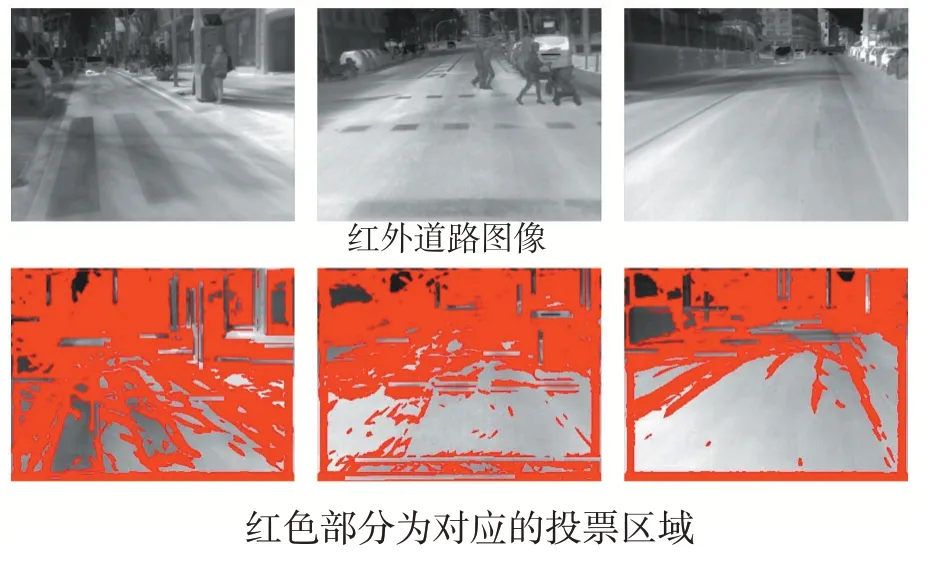
图1
1.2.2 基于方向约束的霍夫变换
阴影所造成的纹理干扰主要体现在其会导致图像中非阴影场景原本的纹理走向改变,在投票时,所投票的直线与车道平行线等直线相交导致产生了局部最大值点,同时,由于红外图像的纹理细节信息较弱,且在复杂的街道中,有时不存在明显的车道平行线等特征,此时若出现强纹理阴影,就会对消失点检测产生较大影响,最终错误消失点的检测位置往往在阴影区域与某一车道平行线的交点位置。为了解决这一问题,本文提出了基于方向约束的霍夫变换来协助检测正确的消失点位置。
首先,我们认为,即使场景中存在较大的纹理干扰导致投票值最大的像素点并不是正确的消失点,但正确的消失点仍会具有较大的投票值,所以,本文首先根据初步投票结果选择出响应强度较大的一部分候选消失点,本文的候选消失点选择标准为:令vote(x,y)表示投票空间坐标为(x,y)的像素点的投票值,如果该点的投票值处于所有投票值的前5%,那么就将该点划为候选消失点,不同图像的投票空间以及候选消失点集见图2。
正确消失点往往出现在候选消失点集中,或者候选消失点所关联的直线上,根据观察,每一个高投票点都有一条或多条参与为其投票的直线,我们称这些直线为候选消失点的关联直线,错误消失点的关联直线往往出现在阴影等干扰纹理区域中,该类关联直线的数量相对而言占少数,但由于其在投票时与其他高投票直线在相交点位置产生了局部极大值,此类交点票数高,进而导致消失点检测结果错误。基于方向约束的霍夫变换通过检测每个候选消失点的关联直线来检测消失点:首先针对每个候选消失点,计算经过该候选消失点的36 个方向的直线中,在直线上且处于有效投票区域内的那部分像素点的数量,再进一步计算这部分像素点中,纹理响应方向与该直线方向一致的像素点所占的所有像素点的百分比,我们将该比例定义为T- SOCR(Texture- Straight Orientation Consistency Rate):

其中Nk表示经过候选消失点的36 个方向中第k条直线Lk上所有像素点编号的最大值,也是像素点总数,θik与orientLk分别表示直线Lk上的第i 个像素点的纹理方向和直线方向,AL 为36 条直线中T-SOCR 值最大的那条直线。

图2
在候选消失点所在的36 个方向的直线中,若AL<0.1,则放弃处理该候选消失点,否则,对满足条件的直线进行投票,本文将针对每个候选点,选择满足AL>=0.1 的直线与T-SOCRLk>=AL*0.8 且T-SOCRLk>=0.1 的直线定义为该候选消失点的关联直线,并在投票空间内,对该关联直线进行投票:本文采用基于TSOCR 的投票方案,对于T-SOCR 较小的直线,该直线可能并非是图像场景中真实存在的直线特征,直线上的像素点的投票值就较低,对于T-SOCR 较大的直线,该类直线极有可能是场景中真实存在的直线,如车道线、道路边缘线等与消失点紧密相关的直线,该类直线上的像素点就会获得较高投票值。最终选择投票值最多的两条关联直线之间的交点作为消失点。图3 为不同图像中得票数最多的两条关联直线。

图3 不同道路消失点的关联直线
传统的霍夫变换的直线检测策略是找到一条或多条直线,这些直线上的点的数量超过预先设定的阈值,但传统霍夫变换在实际应用中并不关注该类点组成的直线是否是在真实场景中存在的直线,为了保证直线检测的准确性,我们在传统消失点检测算法中加入方向约束,基于方向约束的霍夫变换避免了传统霍夫变换中会出现的检测出场景中原本不存在直线的错误情况。
2 实验结果与分析
2.1 定性分析
本文采用250 张红外道路图像进行实验,并手动标定了数据集中图像的消失点的准确位置。下图展示了3 种不同的方法在图片上的部分检测结果,图片均为红外道路,且环境较为复杂。绿色加号表示标定消失点位置,红色加号为本文算法检测结果,粉色加号为Yang[10]方法,蓝色加号为Kong[8]方法。
由图4 可以看出,虽然在一些道路线索较为明显的图像中,三种算法并没有显著的差别,且均能较为准确地检测出消失点的位置,但在具有明显阴影干扰或道路标志线不明显的道路上,本文的方法相较于另外两种方法都更能准确地检测出消失点的位置。

图4 实验结果
2.2 定量分析
为了评估本文提出的消失点检测算法在数据集里的整体表现,本文采用归一化欧氏距离[11]来量化检测出的消失点与标定消失点之间的距离误差,如下:


其中M 表示数据集中图像总数量,表1 为三种不同算法的评估结果。
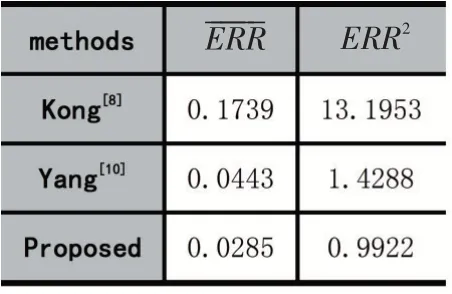
表1
综合定性分析和定量分析结果可知,本文方法的检测结果距离误差最小,检测效果明显比Kong 方法和Yang 方法更佳,能够更加精确地检测出红外道路的消失点位置,且在具有阴影等干扰纹理和道路标志线等道路特征不明显的情况下,也具有较好的效果。
3 结语
本文使用Gabor 滤波和基于方向约束的霍夫变换来检测红外道路图像的消失点。首先经纹理方向投票后对投票区域进行了筛选,一定程度上避免了干扰纹理区域造成的影响。然后,本文根据投票结果,使用基于方向约束的霍夫变化从候选消失点集中寻找关联直线,通过关联直线的交点定位了消失点的位置,本文算法在具有阴影等干扰纹理以及道路标志线不明显的情况下也能较准确地检测出消失点位置,有效提高了消失点检测的精度,能够很好地适用于红外道路图像的消失点检测。
猜你喜欢
软件(2020年3期)2020-04-20 01:45:18
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:00
电脑知识与技术(2018年35期)2018-02-27 13:29:44
Coco薇(2017年8期)2017-08-03 15:23:38
自动化学报(2017年11期)2017-04-04 02:52:44
Coco薇(2015年5期)2016-03-29 23:22:15
电视技术(2014年11期)2014-12-02 02:43:28
小说月刊(2014年5期)2014-04-19 02:36:48
吐鲁番(2014年2期)2014-02-28 16:54:44
