基于低空无人机遥感的高粱生长状况监测*
2021-05-11 14:00陈虹谢玲陈林琳
中国农机化学报 2021年4期
陈虹,谢玲,陈林琳
(1. 南通科技职业学院,江苏南通,226001; 2. 南京理工大学紫金学院,南京市,210023)
通讯作者:谢玲,女,1984年生,江苏仪征人,硕士,讲师;研究方向为量子通信,自动控制和算法。E-mail: xieling1234@126.com
0 引言
高粱是世界第五大农作物,是酿造业和饲料业的基础原料,在我国种植广泛且近几年的对外依存度较高[1]。全面并准确地获取高粱的生长状态信息对指导高粱的生产、精确的预测产量、评价生产耗能等具有重要的现实意义。
仅通过人力采集的方式获取农作物生长状态信息的方法,费时、费力、具有破坏性,已无法满足大规模和精准农业生产的需要[2]。基于卫星遥感技术对农作物的监测具有快速、无损、监测区域面积广等优势,应用较为广泛[3]。但是,在对田块尺度的农作物和作物关键生育时期的监测时,卫星遥感存在的时空分辨率低、易受气象条件影响等问题[4-5],限制了其对作物生长监测的精度和应用范围。
近些年,配备高光谱相机的无人机遥感技术,可快速且可低成本的获取田块尺度遥感影像。根据这些具有较高时空分辨率的农作物光谱信息,可以更准确地提取出与作物长势紧密相关的波段信息,实现大面积、精准的估测农作物的长势。文献[6]根据无人机采集的冬小麦高清数码图像,建立各个生长阶段的作物数字表面模型及高度模型,实现快速估算冬小麦的株高。文献[7]以玉米地上干生物量为研究对象,获取无人机高光谱数据后,对比不同人工神经网络法反演生物量的精度。文献[8]基于无人机遥感技术,研究了大田玉米冠层叶绿素含量检测及分布图绘制方法,实现田间作物长势评价和精细化管理。文献[9]基于微小无人机遥感平台采集猕猴桃试验区的可见光遥感影像,经和地面实测数据对比,得出猕猴桃覆盖度可反映猕猴桃的长势信息的结论。文献[10]提出了基于可见光遥感影像的棉花苗情提取方法,经过和实测数据对比,验证了该方法的时效性和精确性。文献[11]利用无人机拍摄夏季玉米各生长阶段的可见光图像,选择三种植被指数,对比通过时序交点阈值法和最大熵阈值法提取玉米的植被覆盖度信息的精度。总之,与卫星和有人驾驶飞机等遥感平台相比,无人机平台在农作物监测方面具有明显的成本和精度优势。
以上研究利用无人机遥感技术,实现对不同农作物的生长状态的监测,但是还未有利用无人机遥感技术对高粱生长状态的监测研究。本文以南通市农业研究实验基地种植的高粱为研究对象,选取可反应农作物长势的叶面积指数(Leaf Area Index,LAI)[12]、植被覆盖度(Fractional Vegetation Cover,FVC)[13]为高粱生长参数的指标,通过多旋翼无人机平台获取高粱不同生长阶段的遥感图像,在建立4种典型植被指数和高粱生长参数LAI和FVC的经验统计回归模型,确定适用于反应高粱长势的最优植被指数;然后,对比实测和通过无人机遥感图像获得的LAI和FVC值,评估无人机遥感评价农作物长势的准确性。
1 材料与方法
1.1 研究区概况
试验于2019年在南通市农业研究实验基地进行,基地地势平坦,土壤类型草甸黑土,土壤质地黏重,前茬大豆,秋整地。高粱品种为红糯16,每公顷的保苗株数为25万株,播种同时施入种肥300 kg/hm2(氮∶磷∶钾=23∶10∶12)。施肥、防虫灭草等均按当地生产进行,播种及各项农事活动均在同一天内完成。
1.2 数据获取
1.2.1 无人机遥感数据
本研究采用大疆经纬M200系列无人机,搭载RedEdge-MX型5通道多光谱相机。相机在120 m的飞行高度时,分辨率(GDS)为8 cm,可采集蓝、绿、红、红边、近红外5个光谱波段。在高粱播种到成熟的过程中,选取3个主要生育期开展无人机遥感作业,选择太阳光强度稳定、天气晴朗无云的天气,10:00~14:00获取遥感图像,试验日期与对应的生育期如表1所示。3次无人机作业时采取同一航线,飞行时间约为20 min,飞行高度为120 m。

表1 无人机遥感图像获取时间及对应的生育期Tab. 1 Acquisition time of UAV remote sensing image and
1.2.2 地面数据采集
地面数据采集工作与无人机空中作业在同一天同一时间段开展,利用美国ALI-COR LAI-2200C植物冠层分析仪,完成研究区域内的高粱叶面积指数LAI的测量。同时,将数码相机安装在杆子上,在距离地面约3 m的高度俯拍高粱冠层的图片,每个拍摄点至少拍摄3张照片。
1.3 数据处理
对无人机采集的多光谱图像,首先采用Pix4Dmapper图像软件将单个图像拼接成研究区域整体的图像。再使用ENVI(The Environment for Visualizing Images)遥感图像处理软件进行辐射定标,采用伪标准地物辐射纠正法,通过建立地面实测反射率和地面实际反射系数之间的线性关系来实现辐射定标。在试验田周边布置两个标称反射率为0.03和0.22的3 m×3 m航拍实验标准反射率参考板。
使用ENVI软件从无人机图像中提取与标准参考板相对应的DN值。利用各光谱波段的参考板DN值和已知的校准参考板反射率值建立了线性回归方程,将无人机图像的DN值转换为辐射定标后的反射率。
ρ(x,y,i)=ai×DN(x,y,i)+bi
式中:ρ(x,y,i)——光谱带i中像素(x,y)的辐射定标后的反射率;
DN(x,y,i)——光谱带i中像素(x,y)的DN值;
ai、bi——光谱带i的线性回归模型的斜率和截距。
无人机多光谱影像的辐射定标需要单独提取绿、红、红边和近红外波段影像的白色参考板DN值,依次分别进行单波段影像的辐射校正。最后,对经过辐射定标的绿、红、红边和近红外波段影像进行波段合成处理,得到多光谱影像合成数据。
对于地面采集的图像,在采用Adobe Photoshop软件处理高粱冠层图片后,将照片导入ENVI软件以估算植被覆盖度FVC值。具体的计算过程为:首先利用“maximum likehood”函数,将每幅图像分为有植被和无植被两类。然后,使用“quick stats”函数确定植被区域中的像素数。将植被部分的像素数除以图像的像素总数,估算出每幅植被图像的FVC值。
1.4 植被指数的选取
在辐射定标后,结合无人机遥感平台,如表2所示,选择4种常用的植被指数用于高粱LAI和FVC反演模型的构建,利用ENVI软件中的自带函数计算植被指数。
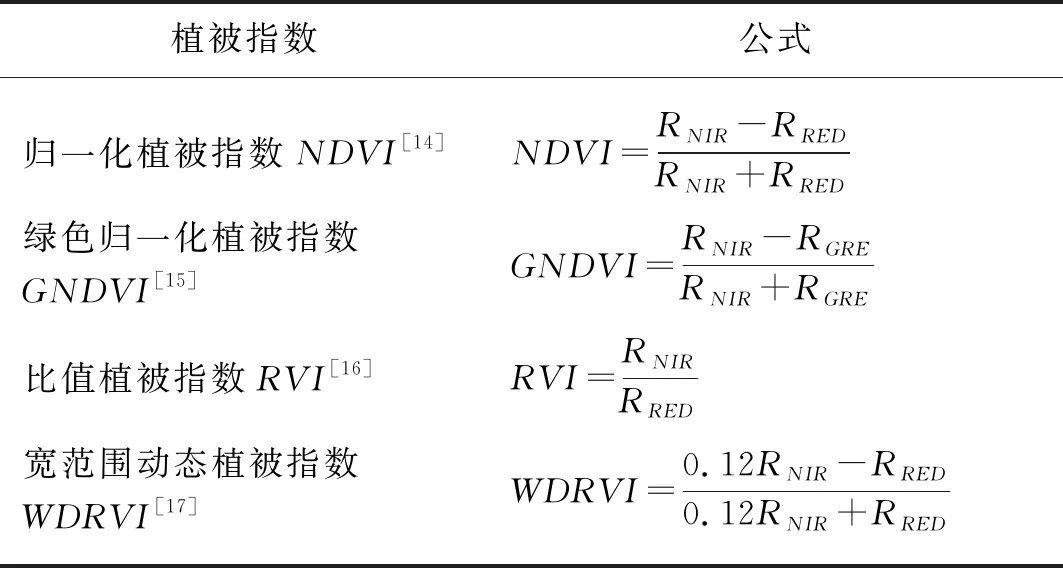
表2 选取的植被指数和计算公式Tab. 2 Vegetation index and calculation formula
1.5 统计分析
使用验证数据集分析回归模型的准确性,选用评价指标:决定系数R2、均方根误差RMSE、平均绝对误差MAPE评价回归模型的精度。此外,使用T检验确定估测模型是否能够以合理的精度预测高粱的FVC和LAI,如果斜率值与1无显著性差异,截距值与0无显著性差异,则可以得出回归模型与直线y=x无显著性差异的结论,即估测模型可以实现高精度的预测。
2 结果和分析
2.1 最优估测植被指数
通过对比分析NDVI、绿色NDVI、RVI和WDRVI植被指数和高粱的LAI和FVC相关性,确定最优的估测植被指数。从50幅无人机图像中提取数据点构建样本数据集,随机选择2/3的样本数据作为训练集与多光谱反射率影像建模,选择指数回归(Exponential Regression,ER)和线性回归(Linear Regression,LR)分别构建高粱LAI和FVC的估测模型。剩余的1/3样本数据作为验证集,评价回归模型的性能,得到的LAI和FVC的4种植被指数的最佳拟合函数和评价指标分别如表3和表4所示。
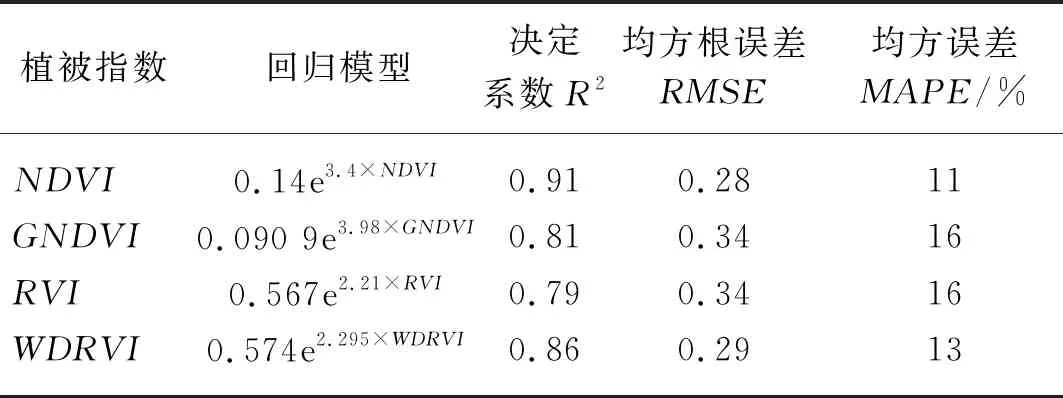
表3 植被指数和叶面积指数的回归模型Tab. 3 Regression model of vegetation index and LAI
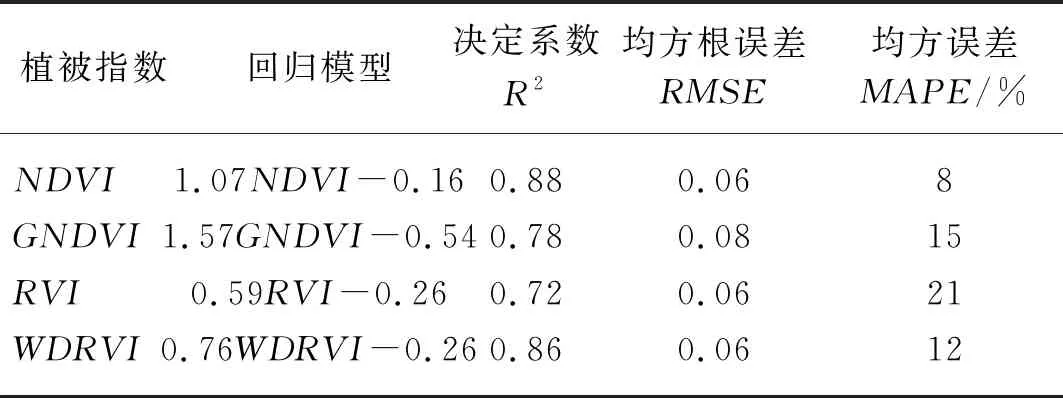
表4 植被指数与植被覆盖度的回归模型Tab. 4 Regression model of vegetation index and FVC
从表3和表4可得,NDVI构建LAI和FVC的估算模型的精度和效果要优于其他植被指数。相比于其他3种植被指数,LAI-NDVI和FVC-NDVI估算模型的决定系数R2值最高(0.91,0.88)且均方根误差RMSE(0.28,0.06)和平均绝对误差MAPE(11%,8%)最低。WDRVI的表现优于绿色NDVI和RVI,但该指数的R2较低,RMSE和MAPE较高,与其他植被指数相比RVI显示准确性最低。由于NDVI与高粱作物的LAI和FVC的相关性最大,所以选择NDVI指数进行下一步的详细研究。
2.2 无人机遥感图像预测LAI精度评价
根据训练数据集绘制NDVI和LAI之间的函数关系如图1所示。
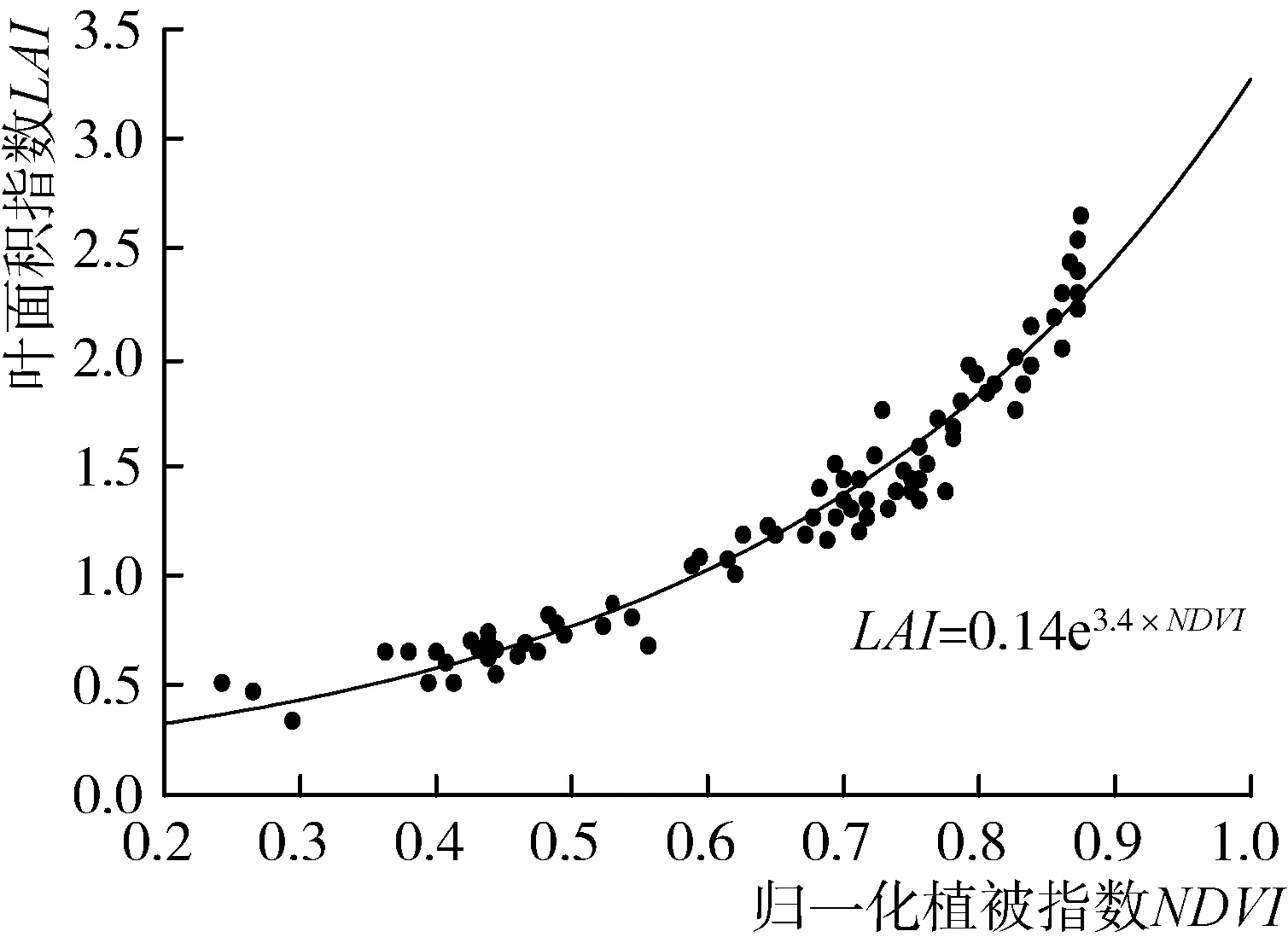
图1 植被指数NDVI与叶面积指数的函数关系Fig. 1 Functional relationship between NDVI and LAI
由图1可以看出,在图像采集期间,高粱的LAI值集中在0.2~3.0的范围内。但当LAI>2.5时,NDVI不会发生明显的变化,保持在0.9左右。该结果与参考文献[18-19]研究的结果较为一致:LAI的继续增大不会显著影响植物红光波段吸收和反射,所以NDVI不会随着高粱叶面积的增大而变化。该现象的主要原因是:对于多数农作物,在LAI≥2.5,吸收峰高于95%时,红光波段的冠层反射率小于5%[20]。
为了评估根据无人机遥感图像得到的NDVI与LAI经验关系的可行性和准确性,对实测的LAI数据和通过无人机遥感数据得到的LAI的预测回归模型进行交叉验证,得到的结果如图2所示。图2中虚线为函数y=x,实线为叶面积指数实测值和预测值之间的最小二乘线性回归方程。
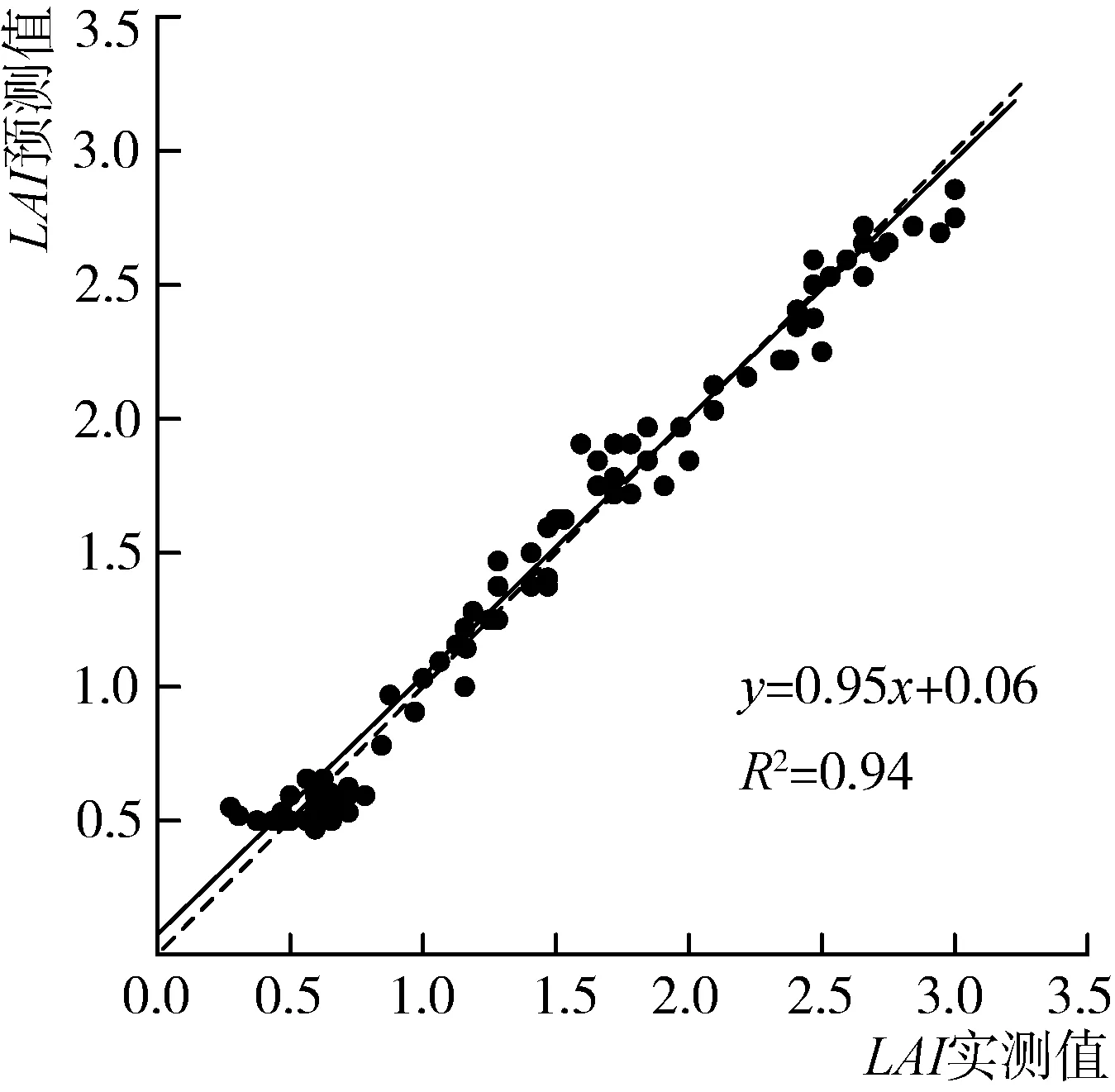
图2 无人机遥感图像预测叶面积指数效果图Fig. 2 Prediction of LAI results from UAV remote sensing images
由图2可以看出,根据无人机图像得到的预测值和实测LAI值之间具有较好的拟合性,决定系数R2=0.94,RMSE=0.16,MAPE=13%。通过最小二乘法得到的回归方程y=0.95x+0.06与实测数据之间的方差为0.95。T检验结果显示:回归方程的斜率与1无显著性差异(p=0.14),截距与0无显著性差异(p=0.15),即回归方程与方程y=x没有显著差异。统计分析表明,根据遥感图像构建NDVI和LAI的线性模型LAI=0.14e3.4×NDVI能够对高粱的叶面积指数LAI进行准确的预测。
2.3 无人机遥感图像预测FVC精度评价
绘制训练数据集的NDVI和FVC之间的函数关系,如图3所示。
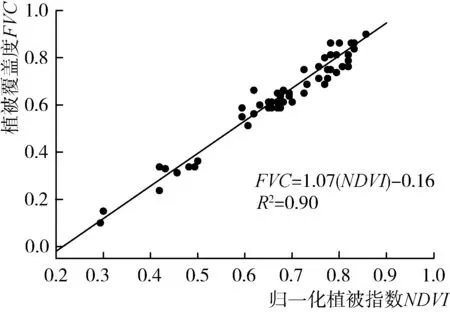
图3 植被指数NDVI与植被覆盖度的函数关系Fig. 3 Functional relationship between NDVI and FVC
根据图3可得,与NDVI和LAI关系不同,NDVI和FVC呈现线性关系(R2=0.90),FVC集中的分布在0.6~0.9之间。与前文的分析方法相同,使用NDVI-FVC的回归模型对实测的FVC和根据无人机遥感图像推算得到的FVC进行交叉验证,得到验证结果如图4所示。图4中虚线为函数y=x,实线为植被覆盖度实测值和预测值之间的最小二乘线性回归方程。
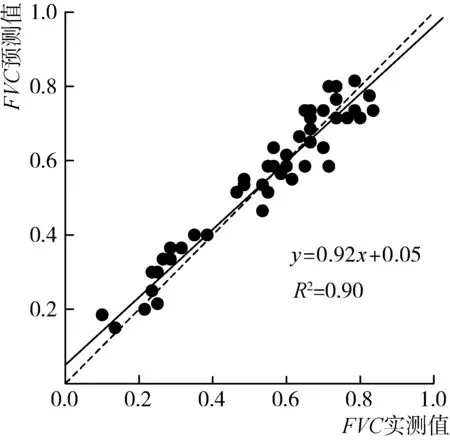
图4 无人机遥感图像预测植被覆盖度效果Fig. 4 Prediction of FVC results from UAV remote sensing images
由图4可以看出,根据无人机图像得到的预测值和实测FVC值之间具有较好的拟合性,决定系数R2=0.90,RMSE=0.05,MAPE=4%。T检验结果显示,回归方程的斜率与1无显著性差异(p=0.07),截距与0无显著性差异(p=0.05),即回归方程与方程y=x没有显著差异。统计分析表明,根据遥感图像构建NDVI和FVC的线性模型FVC=1.07NDVI-0.16能够对高粱的植被覆盖度FVC进行准确的预测。
2.4 无人机遥感图像预测LAI-FVC之间的关系
根据FVC和LAI的实测值,绘制两者的函数关系如图5所示。
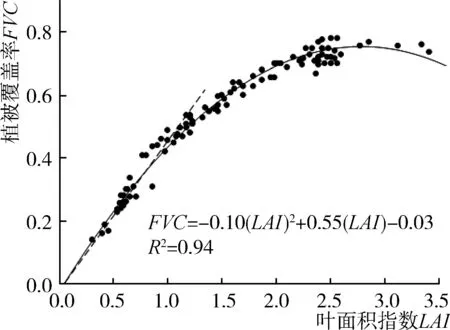
图5 LAI-FVC实测值函数关系Fig. 5 Functional relationship of measured values of LAI-FVC
从图5可以看出,LAI-FVC之间呈现曲线相关,在LAI<1.5时,如图6中虚线所示,LAI-FVC之间呈现线性的关系;当LAI>1.5时,LAI-FVC之间的曲线关系较为明显。当高粱冠层的LAI值达到约2.5时,植被覆盖了约70%的地面面积。在LAI大于2.5后,叶面积的继续增大,并没有引起植被覆盖度的变化。因此,当地块的植被覆盖度较高时,虽然LAI仍可能增加,但其NDVI值基本不变。
3 结论
本研究利用无人机多光谱遥感系统建立了植被指数和高粱LAI、FVC之间的回归模型,并预测其精度,结果表明,通过无人机遥感技术可以精确、可靠地预测高粱作物的生长状态。
1) 归一化差异植被指数NDVI为反应高粱长势最优的植被指数,通过无人机遥感图像得到的NDVI值估计高粱的LAI和FVC的鲁棒性较好。LAI-NDVI和FVC-NDVI估算模型的R2值最高(0.91,0.88),且RMSE(0.28,0.06)和MAPE(11%,8%)最低。
2) 根据遥感图像分别构建NDVI和LAI及FVC的线性模型LAI=0.14e3.4×NDVI和FVC=1.07NDVI-0.16能够准确预测高粱的LAI值和FVC值。
3) 在高粱生长季的后期LAI>2.5时,由于NDVI饱和度问题会降低其对LAI预测效果。
猜你喜欢
科学技术创新(2022年30期)2022-10-21
古今农业(2022年2期)2022-08-15
青年文学家(2022年1期)2022-03-11
农业与技术(2021年23期)2021-12-14
今日农业(2021年20期)2021-11-26
原子与分子物理学报(2020年5期)2020-03-17
农业机械学报(2019年6期)2019-06-27
水土保持研究(2018年5期)2018-10-12
中国农业信息(2018年2期)2018-07-28
西藏科技(2015年1期)2015-09-26