基于二维码的农机机组作业监测方法研究与试验*
2021-05-11 13:38刘婞韬李小龙吴才聪陈华张传帅孙梦遥
中国农机化学报 2021年4期
刘婞韬,李小龙,吴才聪,陈华,张传帅,孙梦遥
(1. 北京市农业机械试验鉴定推广站,北京市,100079; 2. 中国农业大学,北京市,100083)
通讯作者:李小龙,男,1980年生,甘肃兰州人,高级工程师;研究方向为农机推广。E-mail: lixiaolong8000@163.com
0 引言
随着农业机械化和信息化水平的快速提高,需要更加精准的农机管理运行监控的方法。目前大田种植在往种植面积规模化、经营方式集约化发展,农机专业合作社已经普遍存在,成为生产作业的主力军[1]。经过深入的走访调研,与农机合作社和农户交流沟通,发现合作社仍然采用传统的管理方式进行农机设备的管理[2],农机合作社与农户签订服务合同,聘请机手为他们工作。在这种情况下,农田、农作物、农机和农具均不属于机手,这对农机管理和作业管理提出了新的需求。主要表现在:一是合作社管理员无法对机手作业考核和评估,无法准确获知每位机手一天进行了多少面积的作业;二是机手获得的报酬通常以工时衡量而不是作业质量,而且合作社管理员无法准确知道机手的具体工作时间与工作地点;三是合作社管理员无法知道是谁在驾驶拖拉机以及他们在具体做什么操作;四是合作社管理员不知道谁应该对低质量的运营负责[3];五是农机管理耗费时间,效率低下。因此有必要对农机的运行进度进行监测,收集农机、农具和机手的信息[4]。机手和管理者应分别负责运营的进度和运营的质量。有效的调度手段,可以提高农机作业的作业质量和工作效率,可以更加合理地配置农机,节约生产资源。
目前商用GNSS终端已经运用在农机管理的调度中。GNSS终端通常配备在农机上,以获取农机生产的实时位置和生产力信息[5-6]。这些数据将通过网络传输到后台服务器进行管理。由于作业的农机、机具和劳动力等生产要素因地点和时间而异,一台GNSS终端只能识别一台农机的信息,无法解决农机合作社管理员对农业生产的监测需求。为此,农机合作社需要一种新的方法替代简单的GNSS终端,满足远程对农机车辆运行位置和运动轨迹的监控,来实现农机作业的精确管理。
1 系统设计
1.1 系统结构设计
基于智能手机的管理系统由软件和硬件组成,硬件部分包括二维码、智能手机、服务器和个人电脑。二维码用于生产要素的识别,包括农机、农具和机手。服务器用于数据的管理、存储和传输。个人电脑用于客户端的监控和数据的分析与展示。软件部分由农机助手APP、服务器软件和监控软件构成,具体的系统结构如图1所示。
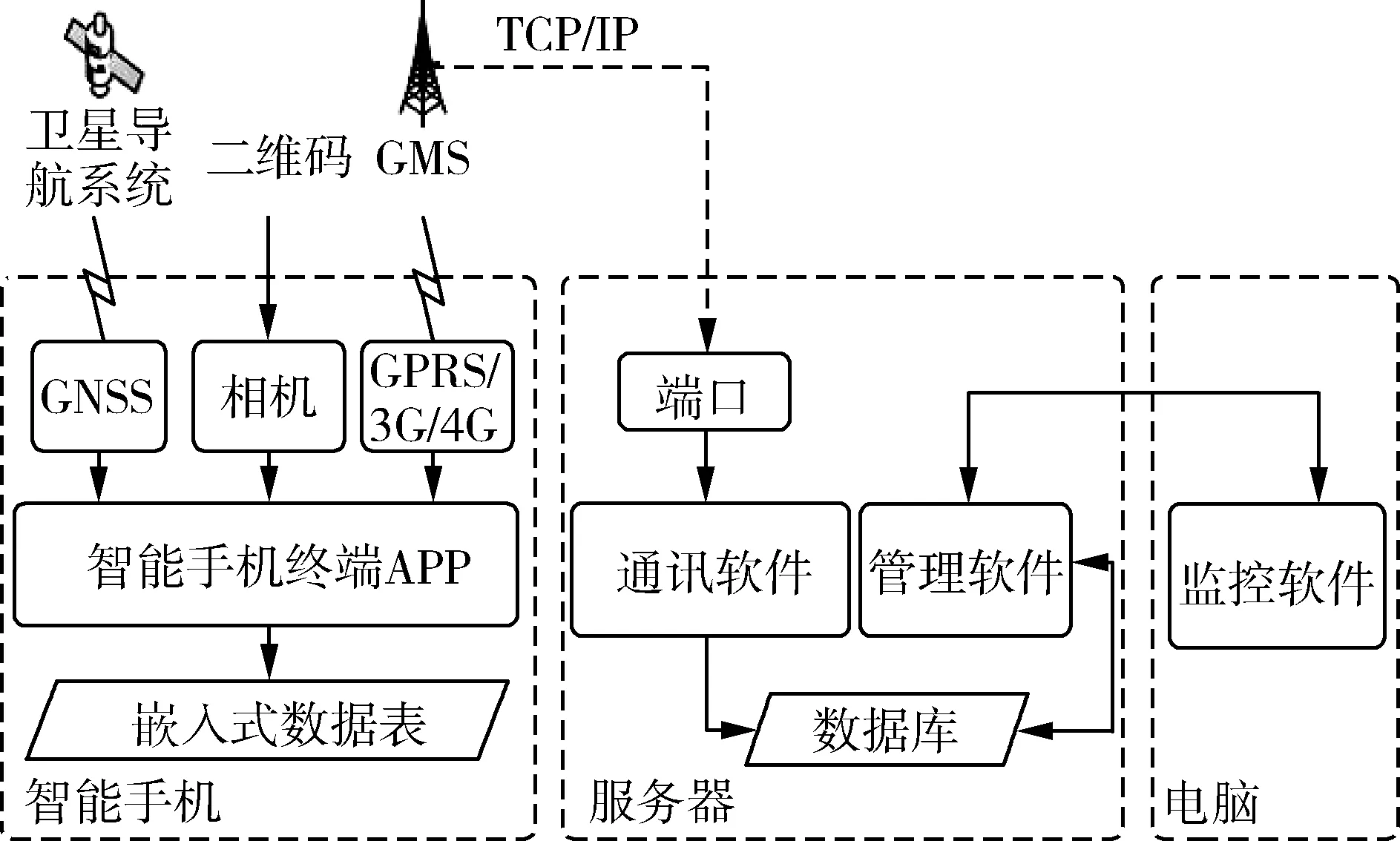
图1 基于智能手机的系统结构图Fig. 1 System structure based on smart phone
机手可在作业开始前扫描农机和农具的二维码,然后获取信息并向服务器传输信息和报告GNSS位置。合作社管理员即可通过个人电脑监控机手的作业情况,知道是哪位机手在工作以及他的精确位置与时间,目前具体工作了多大面积的农田,一定程度上实现数字化与可视化的管理方式[9]。
1.2 系统功能
如图2所示,整个系统分为农机助手APP、农机管理企业号、后台管理、基础数据库以及接口API等主要的组成部分。
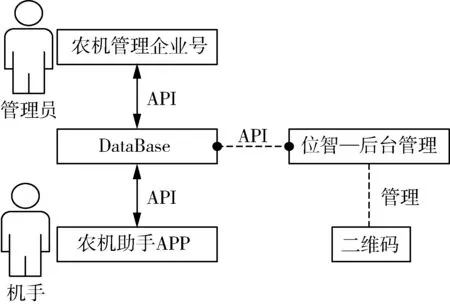
图2 系统组成图Fig. 2 System composition
农机助手APP的使用对象为机手,主要实现通过二维码对作业要素进行绑定、通过位置数据对作业过程进行记录等;农机管理企业号的使用对象为合作社管理员,主要实现对各个机手的作业进度查看、作业记录查看等功能[10]。二维码是农机、农具的唯一身份标志,后台管理平台对其进行统一管理。
2 系统监测方法设计
2.1 二维码的设计
二维码是一种矩阵条码(或二维码),可以比传统的通用产品码(UPC)条码更快地识别,并广泛用于信息检索[11]。基于二维码特殊的数据传输优势,本文为农业生产过程中所投入的机、具编制相应的二维码,即在农机作业开始前对各类已编码的生产要素进行二维码扫描,在作业过程中如有相应要素的变化,如人员更替、作业环节的变更等,再扫描新投入人员或机具的二维码以实现整个作业过程中生产要素的精确监测。为后续的作业质量溯源与作业量统计提供数据依据[12]。农田、机手、农机、农具等都是农机作业的生产要素,除了农田是不变的因素,主机和农具要素都可以用二维码唯一识别,如图3所示。
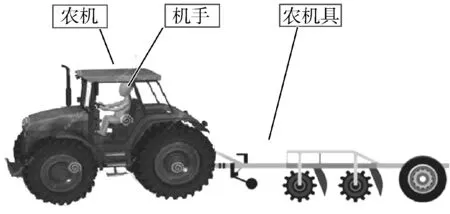
图3 农机生产要素Fig. 3 Agricultural production factors related to agricultural machinery
在作业前,机手通过智能手机上的后置摄像头扫描农机和农具上的二维码,即可实现生产要素的绑定,如图4所示。
唯文章之用,实经典枝条……于是搦笔和墨,乃始论文。详观近代之论文者多矣:至如魏文述典,陈思序书,应玚文论,陆机《文赋》,仲治《流别》,弘范《翰林》,各照隅隙,鲜观衢路……又君山、公干之徒,吉甫、士龙之辈,泛议文意,往往间出,并未能振叶以寻根,观澜而索源。……夫铨序一文为易,弥纶群言为难……[注]范文澜:《文心雕龙注》,第726-727页。

图4 APP工作界面(牌号、机具为测试所用)Fig. 4 User interface of APP (Vehicle registration plate and Machinery are used for testing)
2.2 农机监控数据的同步与显示
主要分为两个部分:数据同步模块,实现中心服务器与WebGIS服务器的数据同步;基于AJAX技术,实现农机作业位置与状态在监控调度平台实时显示。
1) 数据同步模块。农机监控系统设置了中心服务器和WebGIS服务器以保证数据的安全性和网站性能。GNSS定位导航终端和手机等将实时的位置数据上报至中心服务器。因此,农机的位置和作业状态信息的实时查看就需要建立数据同步模块实现中心服务器与WebGIS服务器的数据同步。
在中心服务器部署数据同步模块,设置每5 s将终端上报的数据推送至WebGIS服务器一次,而终端的位置上报间隔≥10 s,因此设定同步间隔为5 s完全可以满足系统的实时性要求。
2) AJAX技术。AJAX(Asynchronous JavaScript and XML)是多种技术的综合,包括JavaScript、XHTML和CSS、DOM、XML和XSTL、XMLHttpRequest等[13-14]。AJAX的异步更新功能使得网页更新时不用再重新加载整个网页,可实现页面的局部刷新,便于创建快速动态网页,提升用户体验。
传统的Web应用模型下,用户操作会直接发送HTTP请求给服务器,服务器接收后开始处理,最后向浏览器返回HTML页面。而在服务器返回结果之前浏览器将一直处于等待状态,如果服务器端数据处理量大,那么用户端将面临更长的等待时间,影响用户体验[15]。而AJAX在Web应用中增加了中间层Script,浏览器和服务器之间的交互是通过这个中间层Script,从而提高了用户访问效率。
农机位置同步与显示流程如图5所示,PDA将实时位置数据上报至中心服务器,中心服务器利用数据同步模块,实现与WebGIS服务器的位置数据同步,监控终端基于AJAX技术,定时从WebGIS服务器获取位置更新数据,在不刷新整个页面的情况下实现车辆位置的定时局部刷新。

图5 位置数据同步与显示流程Fig. 5 Process of location data synchronization and display
3 软件设计
3.1 数据传输
农机作业过程中的数据传输主要包含:位置数据及二维码扫描数据。其中位置数据的获取既可通过PDA的自身定位数据,也可以通过专用的定位终端。为了保证数据的可靠性,PDA与服务器的数据交互在传输层上采用基于连接的TCP传输方式。如图6为智能终端及服务器端数据传输序列:当手机GPRS连接建立成功后向服务器发送第一条登陆信息包,10 s内收到服务器响应数据包则认为连接正常,开始发送定位信息(GPS信息包),5 min后会开始循环发送状态信息包(时间间隔可设置);当GPRS连接建立不成功时,终端不能发送登陆信息包。当GPRS连接失败3次后,每20 min重新尝试连接,若连接成功,则继续发送数据包,否则继续;终端发送了登陆信息包或状态信息包后,超过10 s没有收到服务器返回包,则认为当前连接建立异常,断开当前GPRS连接,重新建立新的GPRS连接并发送登录信息包;连接被判断为异常,重复3次建立连接后发送的登陆信息包或状态信息包都收不到服务器响应的数据包,终端启动定时尝试功能。
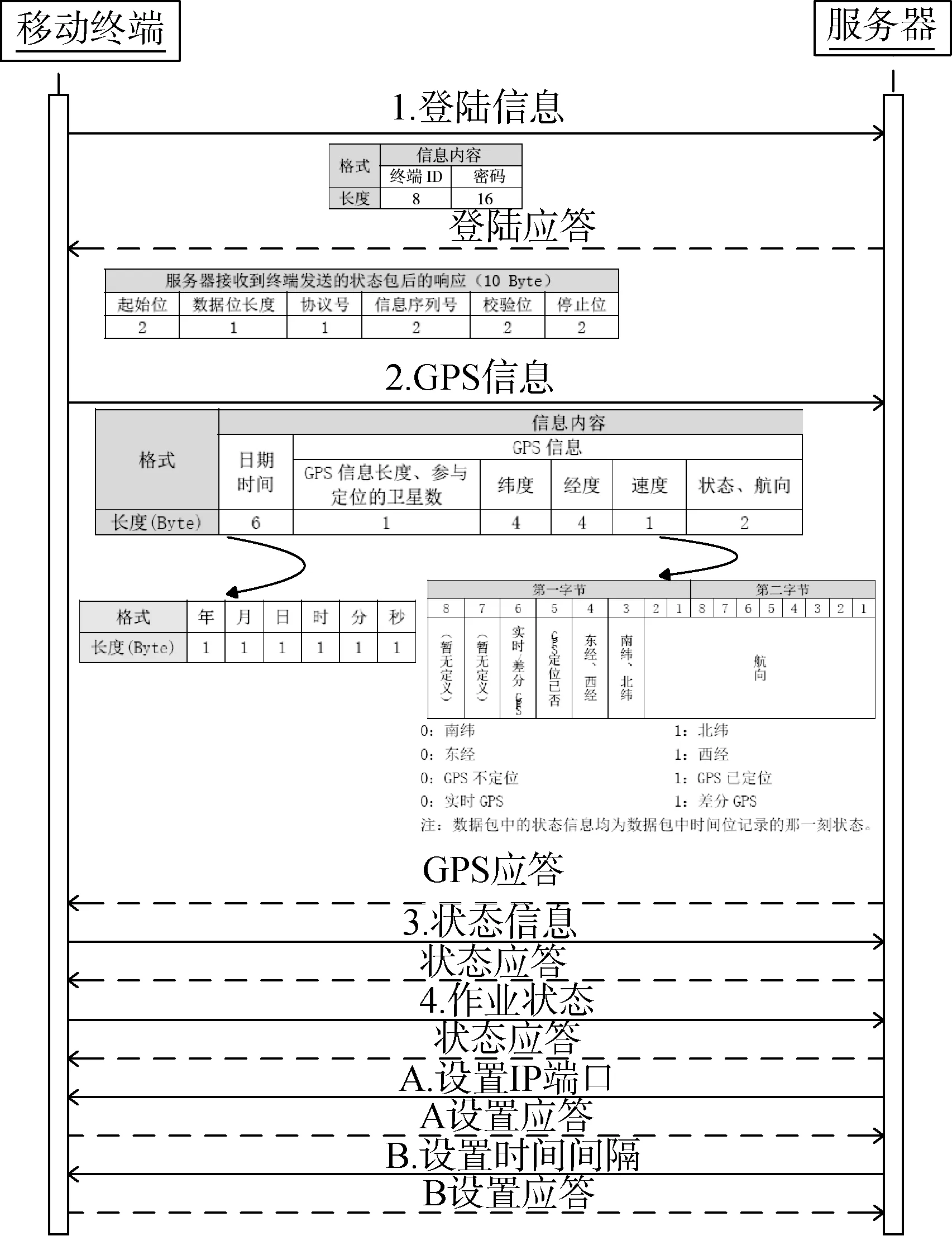
图6 数据传输序列Fig. 6 Data transfer sequence
数据传输常用形式主要包括字符串和XML。字符串缺乏结构性,但数据冗余较小,而XML结构性强,但数据冗余较大,为了有效节省流量,二维码的解析数据传输采用字符串形式。PDA端位置数据的读取选择最常用的$GPGGA并做进一步解析转化成有实际意义的定位信息数据。再将解析后数据与PDA唯一标识码IMEI进行合成处理成完整的终端定位信息,传输到GPRS通信网络上。
3.2 系统架构
本文设计了基于Android智能手机的农机助手APP,可利用其自带的GPS模块、无线网络模块、摄像头和一定的数据处理能力实现农机位置和作业过程中各类生产资源的精准监测[16]。农机助手APP采用Hybrid混合架构,使APP具备良好的扩展性、稳定性、维护性[17]。农机助手APP中需要手机提供GNSS坐标、时间等参数,此时手机是作为传感器的角色,用于实时接收GPS定位数据并识别农机作业中生产要素的二维码,这些数据由手机操作系统的API接口提供,APP根据设计需求调用API获取相应的数据。同时,由于采用的是Hybrid混合架构,APP端的显示页面采用的是Web地图,因此可以在地图上实时显示当前位置以及作业轨迹。最终手机通过HTTPS协议将数据打包回传到服务器,以实现农机作业过程的精确监测。
3.3 作业面积计算算法
评估某个机手的作业质量的主要考量因素是一定时间段的作业面积,本研究基于手机GNSS反馈的轨迹点,通过DBSCAN算法对农业机械作业轨迹进行分析。DBSCAN算法是一种很典型的密度聚类算法,该算法利用基于密度的聚类的概念,即要求聚类空间中的一定区域内所包含对象(点或其他空间对象)的数目不小于某一给定阈值。过滤低密度区域,发现稠密度样本点[18-19]。算法执行的过程中,首先确定指定类簇的最小数目MinPts和半径域Eps;然后根据Eps和MinPts判断对象集中对象的属性(核心点、边界点、噪音点);最后根据当前对象属性判断当前对象域是否构成一个类簇,并根据此方法判断数据集中的每个点的属性。以此来区分监测到的数据点是作业状态或非作业状态,并根据类簇的面积计算出作业面积。因此该算法对正确分类农机作业状态下的有效作业轨迹,并计算作业面积有着较高的准确性。
3.4 APP工作流程
农机助手APP以配置的时间间隔记录农机的确切位置及实时作业里程。APP工作流程如下。
1) 在作业前,机手扫描农机和农具的二维码获取其基础信息。
2) 检查GNSS和GPRS/3G/4G的工作状态。若其关闭,则弹出驱动程序的GNSS配置界面请求用户启用位置服务。
3) 当APP离线时,农机助手可备份手机中的数据并上传到GPRS/3G/4G,提高了信息获取的稳定性。
4) 当点击“开始干活”的按钮时,APP开始上传消息以指示工作状态,同时计算运营里程和作业面积,作业结束后点击按钮“结束干活”。
5) 根据上述全球导航卫星系统提供的位置和信息,可以计算运行里程和作业面积[20]。流程图如图7所示。
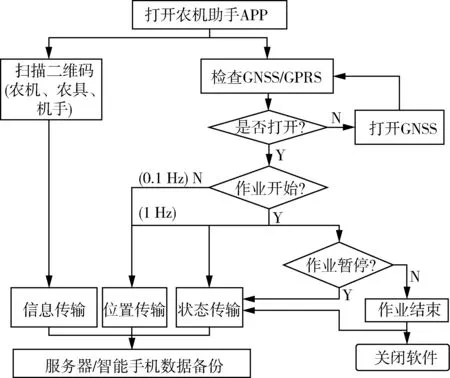
图7 农机助手APP工作流程图Fig. 7 Flowchart of agricultural machinery assistant APP
4 试验结果与分析
4.1 不同设备监测轨迹对比试验
为验证手机定位精度能否满足农机作业轨迹监测的需求,设计了对比试验,为同一辆农机安装了实时动态定位装置(Real Time Kinematic, RTK),常用农机定位终端(GT06)和智能手机共同记录农机作业定位数据。试验中选择了一块6.67 hm2左右的农田作为试验田,作业类型为冬小麦播种作业。试验将整个农田作为监测对象,试验分为RTK、农用监测终端以及手机监测三种监测方式开展对比。其中手机监测使用手机型号为三星Galaxy S3,并提前安装好监测软件,要求农机手在作业前对其农机主机及机具二维码进行扫描,实现农机作业位置数据的有效监测。轨迹对比情况如图8所示。
从监测轨迹结果可以看出,不同终端定位所得的单条轨迹长度并无差别,RTK定位精度最高,其精度可达厘米级,常用于自动驾驶定位,所以可以作为非常准确的农机作业轨迹参考依据。虽然普通的农机定位终端和手机监测软件获得的作业轨迹都有重叠现象,但是整体的轨迹条数并无缺漏,并且轨迹点清晰可辨。其中,由于RTK设备与手机监测软件的数据上报频率都为1 s,而GT06的数据上报频率为10 s,所以,轨迹点的疏密情况有一定的差异,但并不影响农机作业里程的统计。由此可以得出手机端监测软件可以作为农机作业的定位轨迹依据,能够满足农机作业轨迹监测的需要。
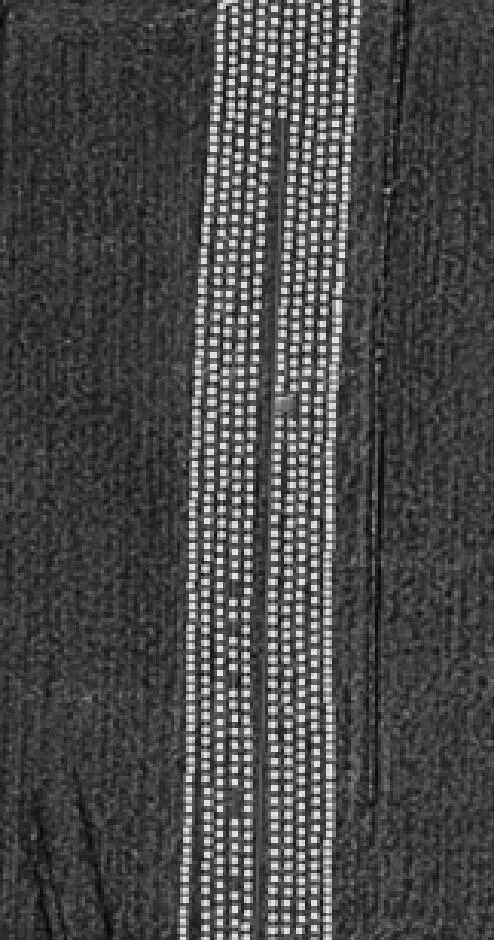


(a) RTK监测轨迹 (b) GT06监测轨迹 (c) 手机监测轨迹图8 不同类型定位终端定位轨迹对比Fig. 8 Comparison of trajectories of different types of positioning terminals
4.2 不同算法作业面积试验
为了提高作业面积统计正确率,本研究对作业面积计算算法进行了设计与验证。作业面积试验使用设备为GT06农用监测终端。作业面积算法共设计有五种,计算方法如表1所示。
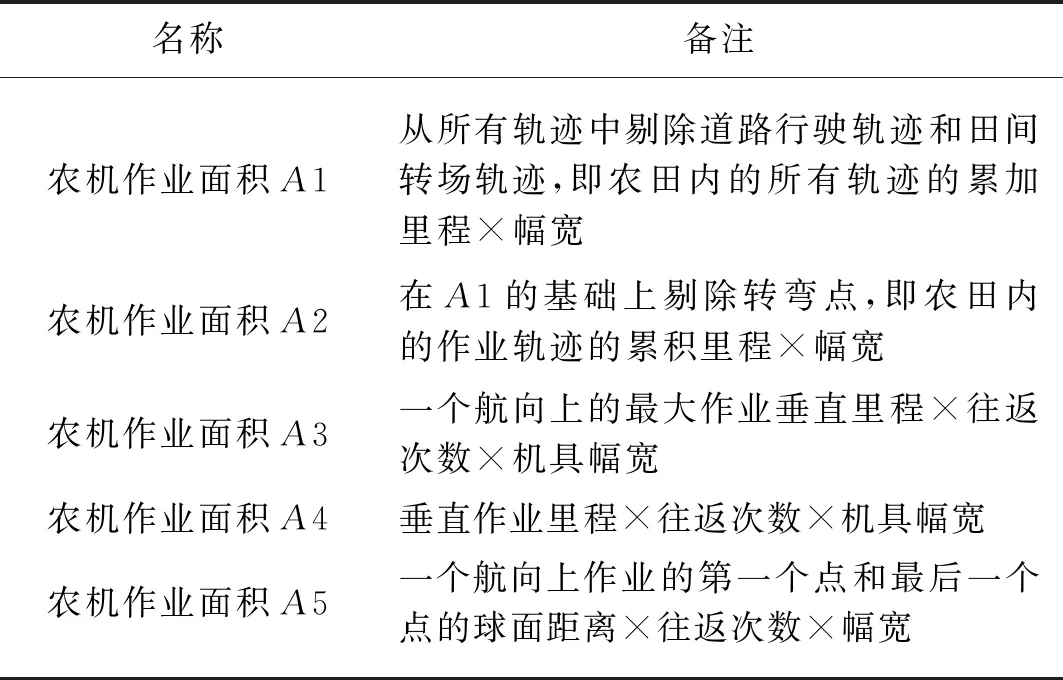
表1 不同作业面积计算方法Tab. 1 Work area calculation method
其中作业面积A1为农田内所有轨迹点按时间顺序相连而获得的累积里程×机具幅宽。A2算法根据作业速度剔除道路行驶轨迹点,再根据航向(连续超过5个异于两个主要方向的作业点)过滤田间转场轨迹点,即可分别解算出每一块农田作业面积,过滤转弯点示意图如图9所示。A3算法中垂直里程=两点间球面距离×cosα,取同一农田内垂直里程最大值进行计算,垂直里程示意图如图10所示。A4算法中垂直作业里程为垂直里程平均值。A5算法为取一个航向上作业的第一个点和最后一个点,直接求取两点间球面距离作为垂直里程[21]。
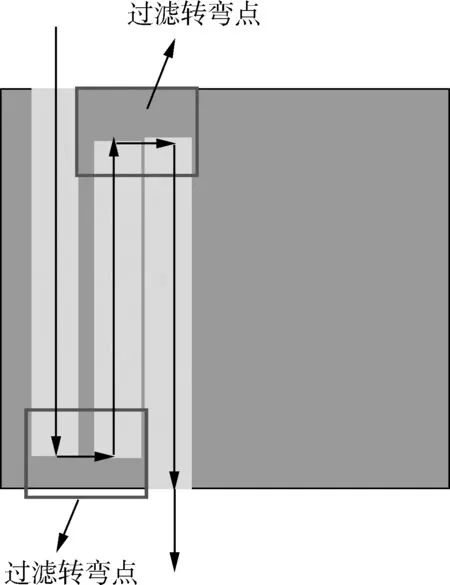
图9 过滤转弯点示意图Fig. 9 Schematic diagram of U-turn trajectory filtering
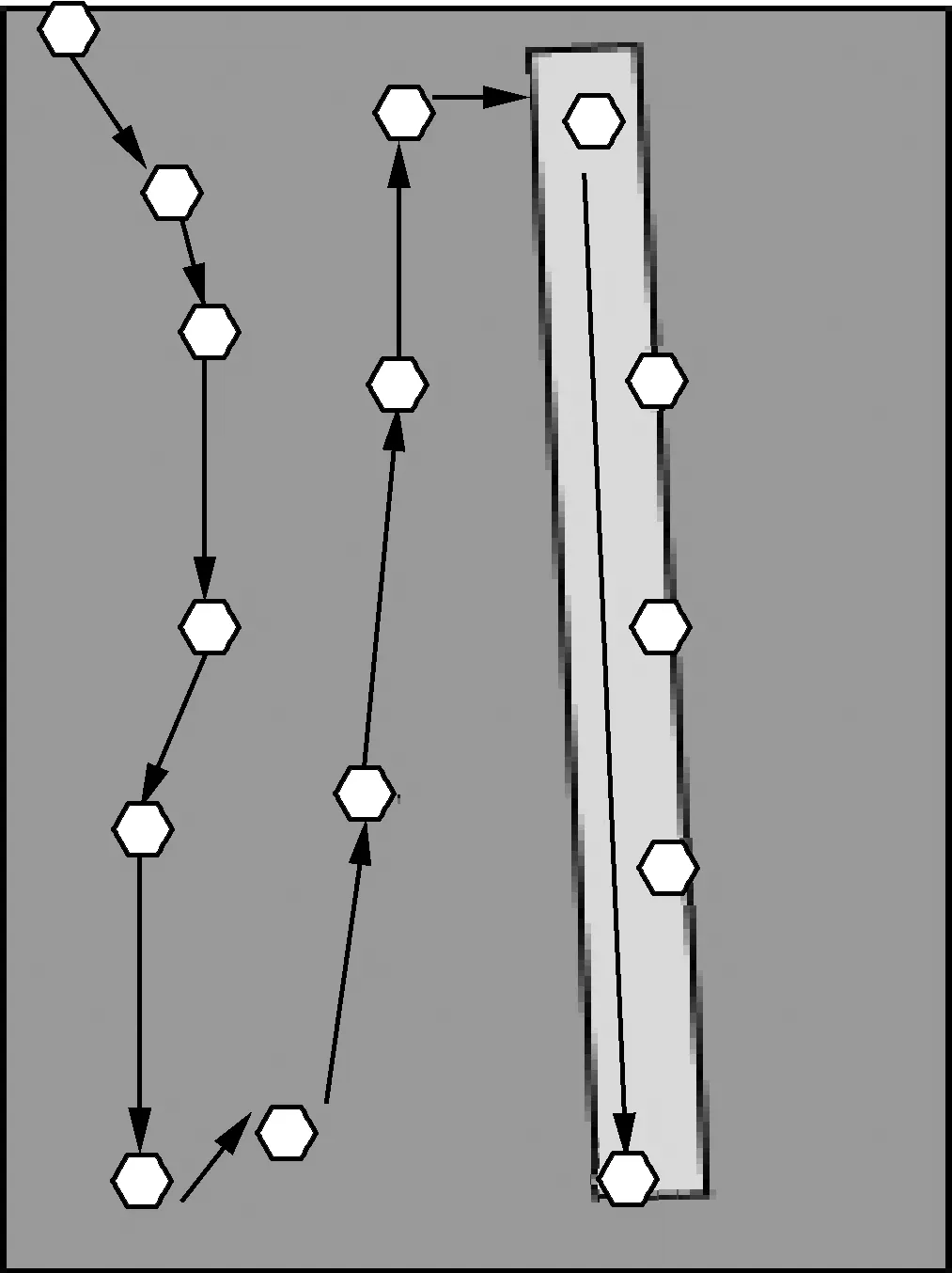
图10 垂直里程示意图Fig. 10 Schematic diagram of vertical distance
试验五种算法作业面积统计误差,分别选取4块农田开展作业面积对比试验。为了验证作业面积精准性,应用RTK设备事先测量地块面积,作为实际作业面积参考值。作业面积分析结果如表2。
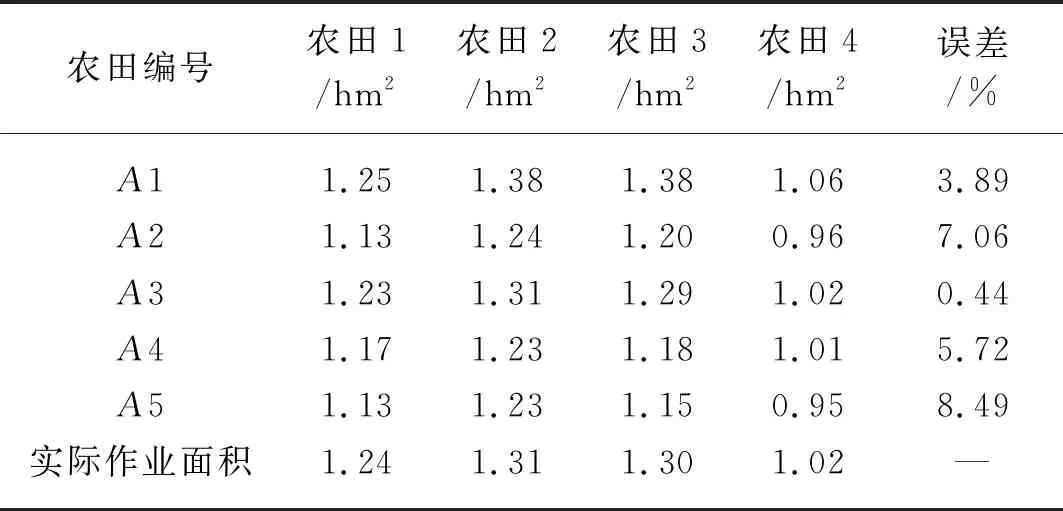
表2 作业面积汇总Tab. 2 Work area summary
通过分析面积误差可以看出:A5>A2>A4>A1>A3。A3算法的误差相对最小,最接近于实际作业面积。因此,选用A3算法来计算实际作业面积最适宜。
5 结论
本文针对我国当前农机服务组织在作业调度与监测方面的应用需求,提出了农机作业全过程调度的理念,利用空间信息技术、二维码编码技术及智能手机,研究了基于二维码的农机机组作业监测方法。主要工作和研究结论如下。
1) 本文针对农机服务组织对农机作业全过程调度的需求,提出了一种针对农机机组作业监测的方法,用于记录机手与农机具的信息,并追踪农机的作业情况。设计并开发了一个应用程序来记录整个农机操作。
2) 基于二维码特有的信息存储和传输特点以及智能手机内置的通信、定位等功能,研究了相应的编码方法与数据传输协议,并开发了基于Android的农机助手APP,对农机定位、作业面积计算进行了开发与设计,实现了农机作业过程中人员、农机、作业类型及作业农田相关关系的准确监测,并可实现农机作业的质量溯源和工作量统计。
3) 结合农业生产,进行了原型系统的应用验证。试验表明,手机端可以作为农机作业的定位轨迹依据,能够满足农机作业轨迹监测的需要;作业面积算法方面,通过设计对比试验认为,最大作业垂直里程×往返次数×机具幅宽的计算方法作业面积误差更小,为0.44%,最接近于实际作业面积,较适合在后台作业面积统计模块中推广应用。综上,基于二维码的农机机组作业监测方法可以提高农机服务组织的管理调度效率,为农机作业监管手段提供技术支撑[22]。
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17
农机质量与监督(2021年7期)2021-12-23
童话世界(2020年32期)2020-12-18
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
学生天地(2017年10期)2017-05-17
时代农机(2017年6期)2017-04-02
儿童故事画报·发现号趣味百科(2015年10期)2016-01-20