移动三维激光扫描技术在地铁隧道断面检测中的应用
2021-05-11 08:15:20丁孝兵杨坤陆庆虾
城市勘测 2021年2期
丁孝兵,杨坤,陆庆虾
(佛山市测绘地理信息研究院,广东 佛山 528000)
1 引 言
21世纪以来,具有节能、快捷和大运量特征的城市轨道交通建设愈趋受到众多城市的关注,成为城市公共交通的重要组成部分,轨道交通犹如城市的血管脉搏,为城市注入生命与活力。在轨道交通建设中,盾构法因施工速度快、自动化程度高以及对地面交通影响等原因,在实际工程中被广泛应用。然而由于盾构隧道所处的地质条件、周边临近工程施工、建筑荷载、列车日常运营振动等影响,会导致隧道变形,存在严重的安全隐患,因此,应对地铁隧道定期开展检测,以确保其安全运营。传统的隧道检测方法观测效率低、劳动强度大、自动化程度低。近年来虽然静态三维激光扫描技术已被用到地铁测量,但为了获取质量好的数据,需要不断换站扫描及布设标靶。移动三维激光扫描技术的兴起,有效避免了上述方法的不足,使得地铁隧道检测工作更加高效、便捷。本文在阐明应用移动三维激光扫描技术进行隧道检测原理的基础上,介绍了利用该技术开展断面检测的关键流程,并以珠三角某市地铁总计 6 km的盾构隧道扫描实践为例,对结果进行分析以验证该方法的可靠性、高效性。
2 隧道移动三维激光扫描系统
2.1 数据采集设备组成
点云数据采集采用的是合作单位自主研发的隧道移动三维激光扫描系统,该系统硬件部分主要由3个组成部分(如图1所示),包括轨道小车、三维激光扫描仪和里程传感器。轨道小车为本系统的运行提供动力和平台载体,采用高精度步进电机,电机可按照设定的速度档位输出恒定的转速,满足运行稳定的要求,小车轮子的材料采用耐磨的绝缘材料,车轮与轨道的摩擦系数经过严格计算,保证小车匀速运动。三维激光扫描仪采用法如Focus 3D X330扫描仪,该扫描仪支持球形扫描和螺旋线扫描(断面扫描)模式,其中螺旋线模式专为移动扫描提供。里程传感器主要用于对轨道车进行里程定位,本次采用的是霍尔传感器。此外,系统还集成了微电脑控制系统,控制轨道小车、扫描仪和传感器以及数据存取。

图1 隧道移动扫描测量系统
2.2 扫描数据处理
隧道移动三维激光扫描每秒可获取上百万点云,采集的海量点云数据中不可避免地存在噪声点,因此,需对以上噪声点进行识别和删除。同时由于移动扫描采用的是螺旋线扫描模式,y坐标(轨道中线切线方向)几乎为零,故需要首先利用里程定位信息还原隧道点云三维坐标。由于里程定位误差及没有扫描仪精确的姿态信息,此时点云并非准确的隧道管片点云坐标,仍无法进行隧道整体变形分析,但可根据预制管片环宽固定的特点采用逐环提取的方式,对单一环的数据进行分析。此外,为获得最终的隧道横断面、椭圆度及水平直径等信息,需对点云数据进行抽稀压缩、椭圆拟合、隧道中轴线提取、横断面、水平直径解算及隧道内壁影像等。具体流程如图2所示:

图2 数据处理流程
(1)点云去噪
隧道扫描采集的点云噪声主要是盾构管片的螺栓孔、注浆孔螺帽、照明设备、各类管线、人行平台、电箱及其他管壁附属设施等,此外扫描仪也会产生噪声点。点云噪声剔除的方法有很多如高斯滤波、拉普拉斯算子、平均曲率流、半径滤波、双边滤波等。对于盾构隧道特殊的形状,本文采用基于切片的点云去噪算法,首先通过最小包围盒确定隧道延伸方向,然后基于隧道延伸方向,对隧道进行分段提取切片。接着对每个切片进行椭圆拟合,最后根据各点拟合残差v是否大于2倍拟合标准差σ,识别并剔除噪声点。
(2)横断面及水平直径解算
盾构隧道的变形主要集中于衬砌连接螺栓接缝位置,隧道变形往往与错台变形同步发展。为确保拟合图形与实际的一致性,提高解算精度,本文采用如图3所示的椭圆分段拟合方法。

图3 椭圆分段拟合
利用圆的拟合方程,对1、2、3、4、5段圆弧进行拟合,得到5个圆弧的圆心(x1,y1),(x2,y2)…(x5,y5)和5个半径R1、R2、R3、R4、R5考虑到天顶上海鸥块较短,数据点少,因此权重较小,最后使用1、2、4、5弧段的圆心的重心作为该断面的中心o(x0,y0),其中:
(1)
由于每段隧道各圆弧的接缝处点相对位置是固定的,因此圆弧的起始角度和终止角度可根据实际情况预先设定,该隧道圆方程可写为:
(2)
该圆上一点到隧道圆拟合中心C(X0,Y0)的距离d就可以写为:
取极角90°的断面点距离d1与极角为270°的断面点距离d2之和作为断面的水平直径d。
3 应用案例
3.1 项目概况
珠三角某市地铁隧道埋深10.5 m~22.4 m,最大站间距 2.72 km,最小站间距 1.05 km,平均站间距 1.23 km。为获取隧道初始状态本次累计对6段区间共计 6 km的线路采用隧道移动三维激光扫描系统获取了 3 866个盾构管片的三维激光点云数据。根据本文所述方法利用自主开发的数据处理软件解算出隧道横断面、水平直径,并生成隧道内壁影像。
3.2 数据采集及注意事项
(1)作业准备
使用前测试轮子与车体的绝缘性,检查可分解部件检查连接是否稳固,确认电机是否能够正常驱动,检查必要的工具是否齐备。首先将车体安置在轨道上,然后将可拆卸部件安装在车体上,再将仪器台和仪器设备安置在车体上,可在 5 min内完成组装。
(2)现场测量
检查确认车辆各部件是否正常工作,设置正确的速度档位、仪器参数和其他要素,确保扫描断面与隧道中轴线垂直,开始轨道上的移动扫描测量。测量作业期间,轨道小车前方应设专人作为引导员以提前发现不利作业因素。此外应注意轨道道床中间突出的停车限位装置、轨道内侧的涂油机喷油头、支撑轨距的横杆连接装置、计轴计、断电绝缘头、其他车辆的避让、小半径转弯或通过道岔时的通过性以及大坡度区段防止轨道小车溜坡。
3.3 成果分析
本次扫描成果主要包括隧道横断面图、隧道断面水平直径及隧道内壁正射影像图,同时对上述成果进行了分析。
(1)隧道横断面
在确保扫描断面垂直隧道中轴线的前提下,每个扫描断面均为隧道横断面。结合里程信息和影像中的环号信息,即可提取指定环号或指定里程的隧道横断面。图4为1#区间线路第8环隧道横断面图。
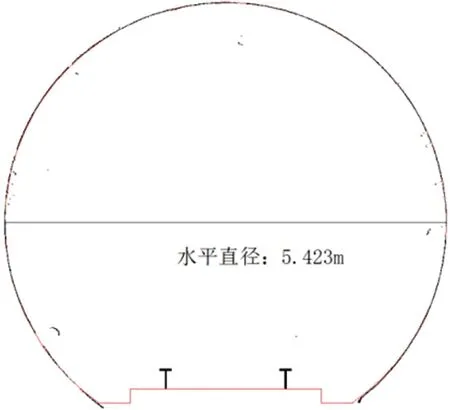
图4 隧道横断面
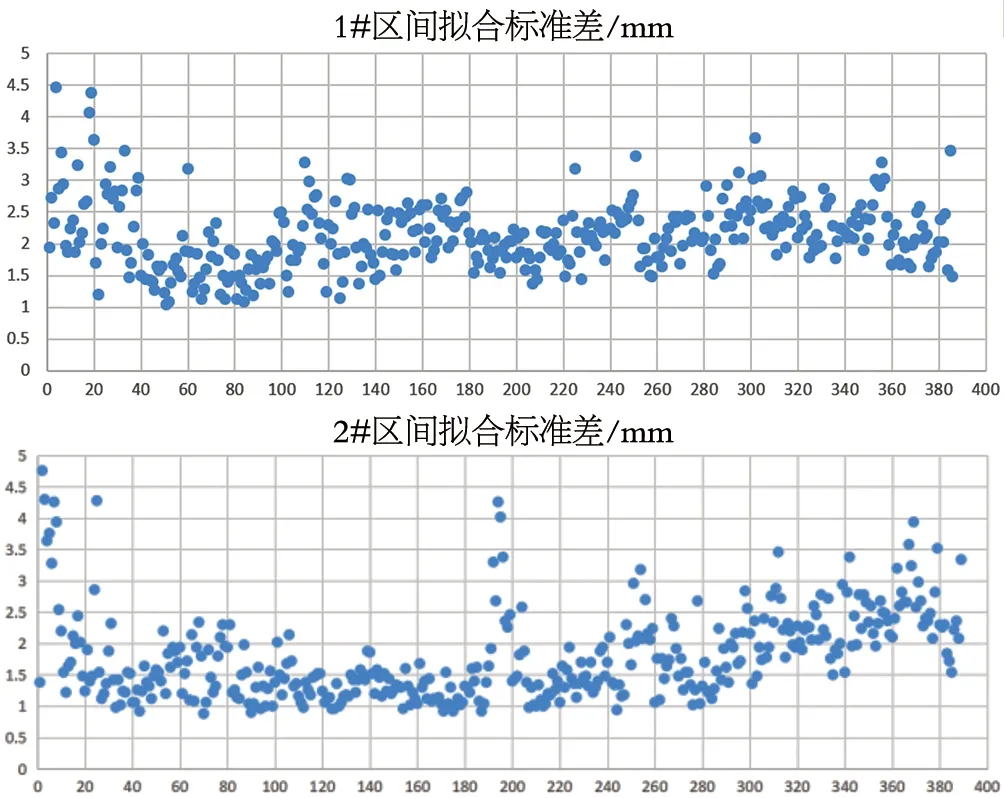
图5 隧道断面拟合标准差
为说明断面拟合情况,图5统计了两个区间的拟合标准差,从图中可知,逐环断面拟合标准差小于 5 mm,95%的断面拟合成果标准差优于 3 mm,说明在点云噪声处理中选择了适合的阈值,可初步看出获得了可靠的断面成果。
(2)隧道水平直径
每个隧道环片等距提取5个切片分别拟合,利用分段拟合方法获取断面,取极角90°的断面点距离与极角270°的断面点距离之和,即可得出该断面的水平直径,取平均值作为该环片最终的水平直径。以1#、2#区间逐环水平直径统计为例,如图6所示,共选取了770环隧道移动扫描数据,曲线整体趋势平稳,除首尾段外(受现场施工影响)水平直径平滑过渡,与实际情况较为稳合,初步说明了解算成果的可靠性。

图6 区间逐环水平直径统计
为进一步验证隧道水平直径解算可靠性,表1统计了某两环水平直径解算的中误差。由表1可知,每个隧道环片内计算的水平直径间最大差值分别为 1.04 mm、 1.42 mm,水平直径中误差均在 1 mm以内,说明了解算成果的可靠性。
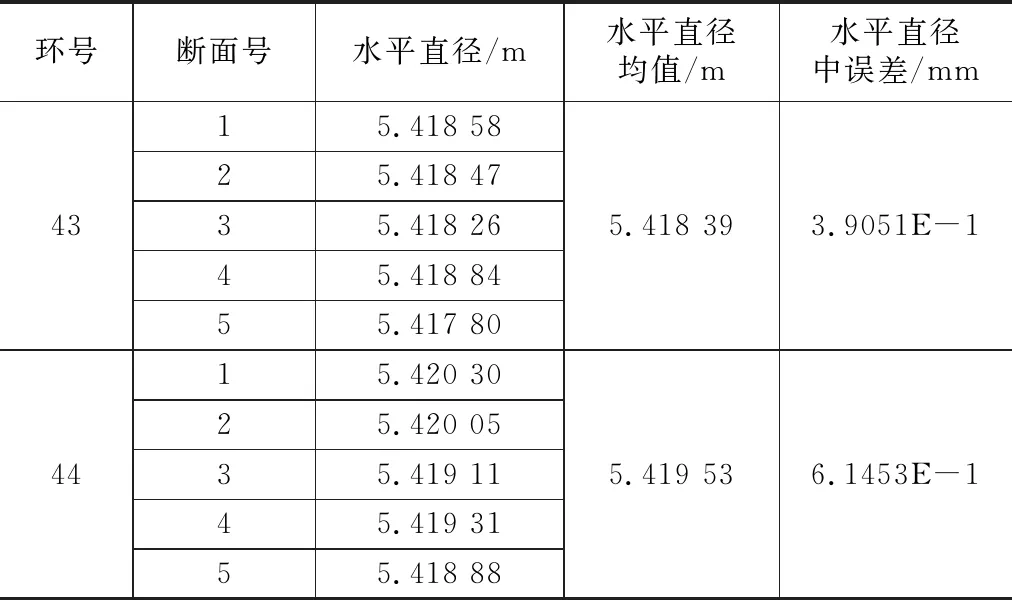
隧道水平直径中误差统计 表1
为验证解算成果的外符合精度,本次利用拓普康MS05全站仪,按照每10环采集一个水平直径数据,共计采集386个断面水平直径数据,对比统计数据如图7所示:

图7 全站仪与扫描仪水平直径差值比较
由图7可知,隧道移动三维激光扫描系统获取的数据与全站仪采集数据差值在 ±5 mm以内,差值在 ±3 mm以内的占94%。因此,隧道移动三维激光扫描与全站仪采集数据具有较高的一致性,进一步验证了该方法的可靠性。
(3)隧道内壁正射影像
三维激光扫描仪不仅可以采集点位的空间坐标信息,同时可以记录隧道场景内的影像信息。本次将获取的灰度影像投影展开至平面,并保持其沿隧道轴线方向上的连续性,经平面旋转、坡度校正后,展开为规则的矩形影像,如图8所示。影像信息经处理后,可发布至局域网平台,方便日常地铁结构调查、内壁附属设施管理、应急抢险指挥等应用。

图8 区间灰度影像图
4 结 语
三维激光扫描技术具有快速性、非接触性和主动性,实时获取的数据具有高密度、高精度等特点。近年来,兴起的移动三维激光测量技术更是进一步提高了测量速度。本文引入了合作单位自主研发的隧道移动三维激光扫描系统,首先介绍了其系统构成、基本原理以及关键流程,在实际工程应用中,获得了高质量的隧道断面检测成果,并对成果进行了分析和验证。实践证明该方法高效、快捷,较传统方法具有明显优势。同时,利用高密度点云数据获取的隧道内壁正射影像图可为结构调查、内壁附属设施管理、应急抢险指挥等提供重要数据支撑。
猜你喜欢
小学生学习指导(高年级)(2021年10期)2021-11-02 05:32:20
工程建设与设计(2021年11期)2021-07-28 06:33:08
云南档案(2019年7期)2019-08-06 03:40:50
中华老年口腔医学杂志(2016年6期)2017-01-15 14:25:21
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
中国感染控制杂志(2015年7期)2015-12-13 08:30:42
现代营销·经营版(2015年3期)2015-04-20 06:46:58
中国当代医药(2015年17期)2015-03-01 02:03:55
山西大同大学学报(自然科学版)(2015年2期)2015-01-22 07:15:13
现代营销·经营版(2013年5期)2013-05-14 14:55:04