SLAM技术在农村房地一体测量中的应用与研究
2021-05-11 08:15:18高红李运健陈悦统
城市勘测 2021年2期
高红,李运健,陈悦统
(广西壮族自治区自然资源产品质量检验中心,广西 南宁 530023)
1 引 言
根据《国民经济和社会发展第十三个五年规划纲要》《中共中央国务院关于坚持农业农村优先发展做好“三农”工作的若干意见》《国土资源部关于进一步加快宅基地和集体建设用地确权登记发证有关问题的通知》《自然资源确权登记局关于进一步做好农村不动产确权登记工作的通知》等一系列要求,在2020年底前基本完成农村宅基地使用权和房屋所有权统一确权登记的任务,考虑到本次任务范围广、时间紧的特征,外业作业手段是大家比较关注的问题[1,2]。目前最常用的两种外业测量方法为图解法(摄影测量方法)和解析法(全野外测量法)。图解法可大大减少外业工作,但成图精度低,且仍需部分外业工作;解析法作业精度高,结果准确,但工作烦琐,工期紧张,因此以上两种方法均存在各自的优缺点[3]。本文选用新型的测量技术即移动式即时定位与地图构建(以下简称SLAM)技术,SLAM可在满足房地一体项目精度要求的前提下,大大减少了外业人员投入,且在内业处理过程中相对无人机倾斜测量减少了很多繁杂的过程,很高程度上提高了作业效率。
2 SLAM技术
SLAM技术是一种扫描仪在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和地图进行自身定位,同时在自身定位的基础上建造增量式地图,实现扫描仪的自主定位和导航。按照一般的理解,激光扫描仪如果安装在移动测量系统中,一定要有一个高精度的定位系统(POS系统)与之匹配,这样,激光扫描仪得到的激光点才能得到对应的位置和姿态数据,进而合成三维的激光点云。为了能解算出激光点云数据的高动态非线性位姿,通过研究激光点云的处理算法,可从这些杂乱无章的点云中找到线索,求取其中隐含的更稳定的高阶特征点和特征向量,并连续跟踪这些特征点和特征向量,进而高精度地动态反向解算扫描仪的位置和姿态。这种高精度的动态反向解算位置和姿态的方法颠覆了传统的测绘方法,为测绘技术开拓了一种新的思路方法[4]。
2.1 技术原理
扫描仪在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和地图进行自身定位,同时在自身定位的基础上建造增量式地图,实现扫描仪的自主定位和导航。其独特的手持技术功能多样,适用于所有环境-特别是室内,地下或难以访问的空间,无须GPS即可提供精确的3D绘图[5,6]。其工作原理如图1所示。

图1 工作原理
2.2 技术特点
由于SLAM技术本身无须GNSS信号(获取控制点绝对位置数据时需借助GPS设备),对工作环境又有极强的适应性,基于SLAM技术的移动测量系统在多个测绘领域发挥作用[7,8],具体表现为:
(1)外业数据采集速度极快,可快速获得所需点云数据,数据精度高。
(2)内业点云预处理时间短,自动化程度高,基本不需要人工干预,短时间便能获得配准好的点云数据。
(3)操作简单方便,无须换站,连续采集,具有连贯性,可实现室内外一体化扫描作业。
(4)SLAM技术的测绘移动测量扫描仪在任意环境中长时间工作故障率低,对于精度要求较高的重点区域,可与固定测站式三维激光系统配合使用,既能保证精度,又能保证效率。
3 实验分析
本文选用广州市南沙区某一村,对SLAM技术与传统测量进行了比对,整个实验使用SLAM设备测量了1个测段,约 20 min,扫描房屋25户;使用传统丈量方法采用同样的房屋,2人一组进行入户丈量,10 min测量1户。
3.1 作业流程
房地一体工作是全面查清宅基地和集体建设用地上房屋等建筑物、构筑物情况,并利用信息化技术形成房地一体的不动产地籍信息。其作业主要流程有:不动产权籍调查、不动产测量、与不动产登记数据衔接、调查结果公示、不动产登记数据库建设、确权分析与发证、资料整理及档案整理,具体将SLAM用于房地一体项目中的流程如图2所示。
3.2 数据采集
外业数据采集部分需要使用的仪器设备有:GPS、像控点反光标志贴、SLAM设备,由于SLAM设备没有绝对定位系统,因此需要获得成果的绝对位置坐标时,需要使用GPS和反光标志贴来获取控制数据后对扫描数据进行坐标纠正。数据采集的主要技术重点及流程如下:
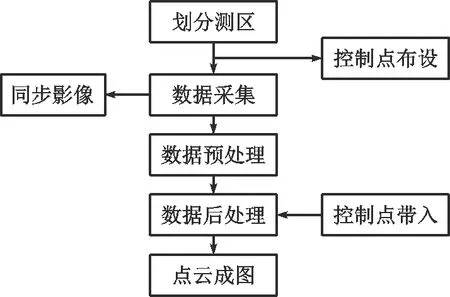
图2 SLAM作业流程图
(1)两人使用RTK及反光标识贴进行像控点布设,一般一个测段可布设3~4个像控点,像控点布设均匀且应分布在明显特征地物点上,SLAM测量人员必须采集像控点;
(2)像控点布设完毕后开始扫描,扫描路线需提前布设,尽可能布设成为多个闭合环组成的测段,且整个测段时间控制在 25 min以内。使用多个闭合环的目的是为了使得点云计算时匹配多,解算精度高,25 min为一个测段主要是考虑观测手的疲劳度和内业数据分析的速率。
3.3 内业数据处理
(1)数据解算阶段
通过数据预处理软件GeoSLAM Hub将原始数据导入进行解算,本次解算时间约为 30 min,一般来说解算时间约为扫描时间的1倍~3倍。在数据预处理软件GeoSLAMHub中查看点云数据以RGB真色彩显示的整体3D及2D效果如图3所示,可以更加直观地比对最终成功的准确性,不同材质显示的颜色不同。
(2)点云坐标转换
由于点云数据无GPS记录,因此点云预处理后的数据需要进行坐标转换,转换坐标有两种方式:一是整体村庄的多测段数据进行点云拼接后直接利用相控点进行坐标转换,二是单测段数据不拼接利用相控点进行坐标转换。本文共测量了一个测段,因此使用的是第二种方式进行转换。首先在点云数据中找到像控点标志,并在点云数据中突出显示如图4所示。
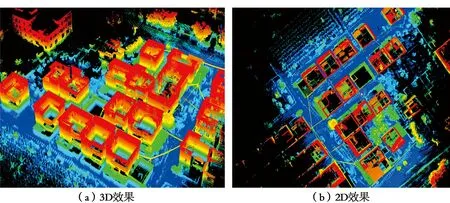
图3 数据预处理效果图
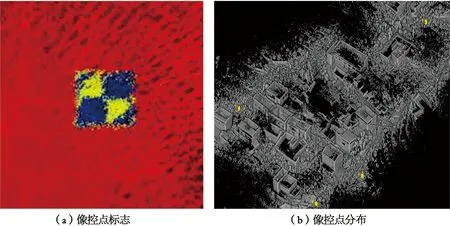
图4 像控点分布图
从图4可以看出,像控点的选取遵循了布设均匀,且在小范围内闭合时也可采集到像控点,根据坐标转换的要求,使用RTK坐标数据和像控点点云数据坐标进行参数计算,将转换后的数据通过外业检核,其精度检核结果如表1所示。
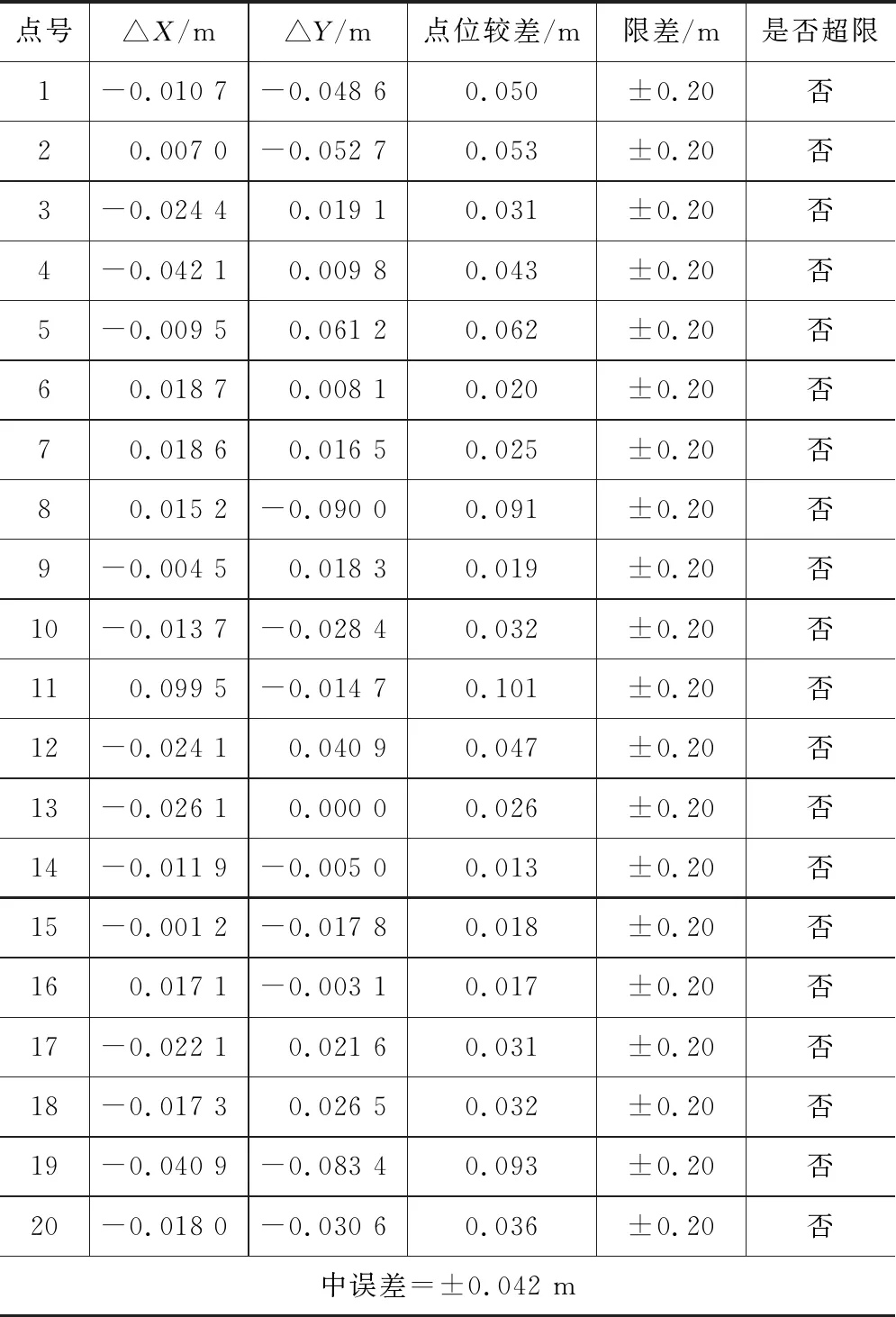
坐标转换精度检核结果 表1
从表1可以看出,随机选取20个房屋角点,通过激光点云得到的界址点数据,经坐标转换后,与实测界址点间的最大误差为 0.101 m,最小为 0.013 m,中误差为 ±0.042 m,本项目规定的界址点采用三级限差(部分解析法),限差值为 ±0.20 m,由此可看出,采用激光点云得到的界址点成果中误差均未超限,测量结果符合本次房地一体界址点 0.2 m的精度要求。
(3)点云后处理阶段
对坐标转换后满足精度要求的点云数据(格式为RCS),通过第三方软件(Realworks或者其他类似软件)打开,进行数据抽稀疏简化,裁剪多余部分,输出RCP工程文件,此格式是为了方便制图人员通过熟练的制图软件CAD或CASS等进行制图而需要处理的过程步骤,其处理前后的数据对比如图5所示。
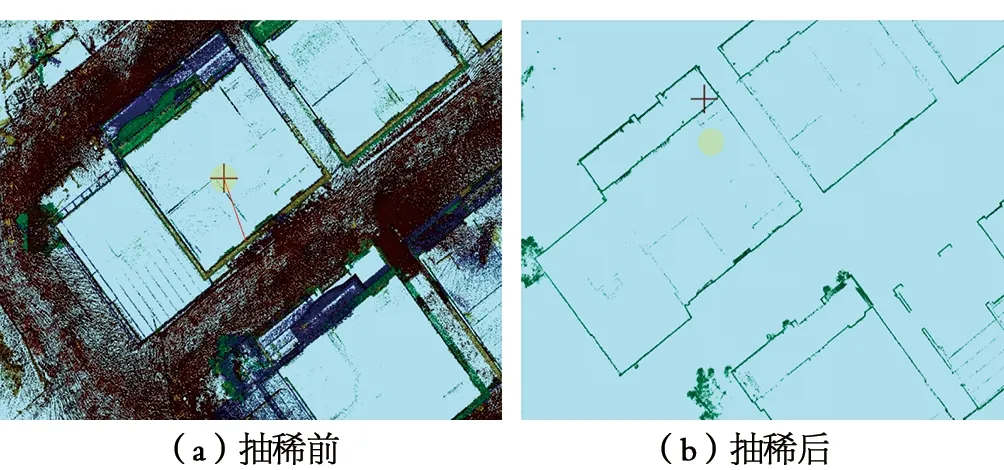
图5 抽稀前后对比图
(4)编制成图
使用Autodesk CAD搭配CASS软件载入点云数据,进行绘图处理,采集同一房屋时,针对不相同的层数需按实际情况裁切不同的平面数据,具体制图过程如图6所示。

图6 点云成图
3.4 结果分析
将传统野外测量方法和手持三维激光扫描仪测量方法进行外业效率和成果精度两方面的比较。使用两种测量方法对25户房屋测量的工作效率比对如表2所示。
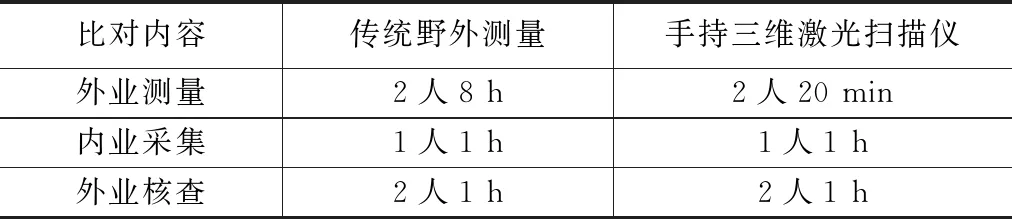
工作效率比对表 表2
从表2可见,传统野外测量的方式中,2人一组每天的工作效率为25户左右,而本文的三维激光扫描仪测量方法,可将外业测量工作提升约24倍,但从内业处理情况来看,完成相同工作时的内业处理基本一致。若以1天扫描仪外业完成300户的外业测量情况来算,其内业处理需要1天,即2人一组2天完成300户的内外也工作,而传统的野外测量方法300户外业需要约11天,按每天内业当天完成计算,2人一组11天完成300户内外页工作。因此本文方法在整体上可提升5-6倍的工作效率,工作效率明显提升。
由于考虑到本项目区的作业方法,该实验的验证主要采取各房屋底层的边长数据比对值来评价测量的准确性,其精度比对表如表3所示。
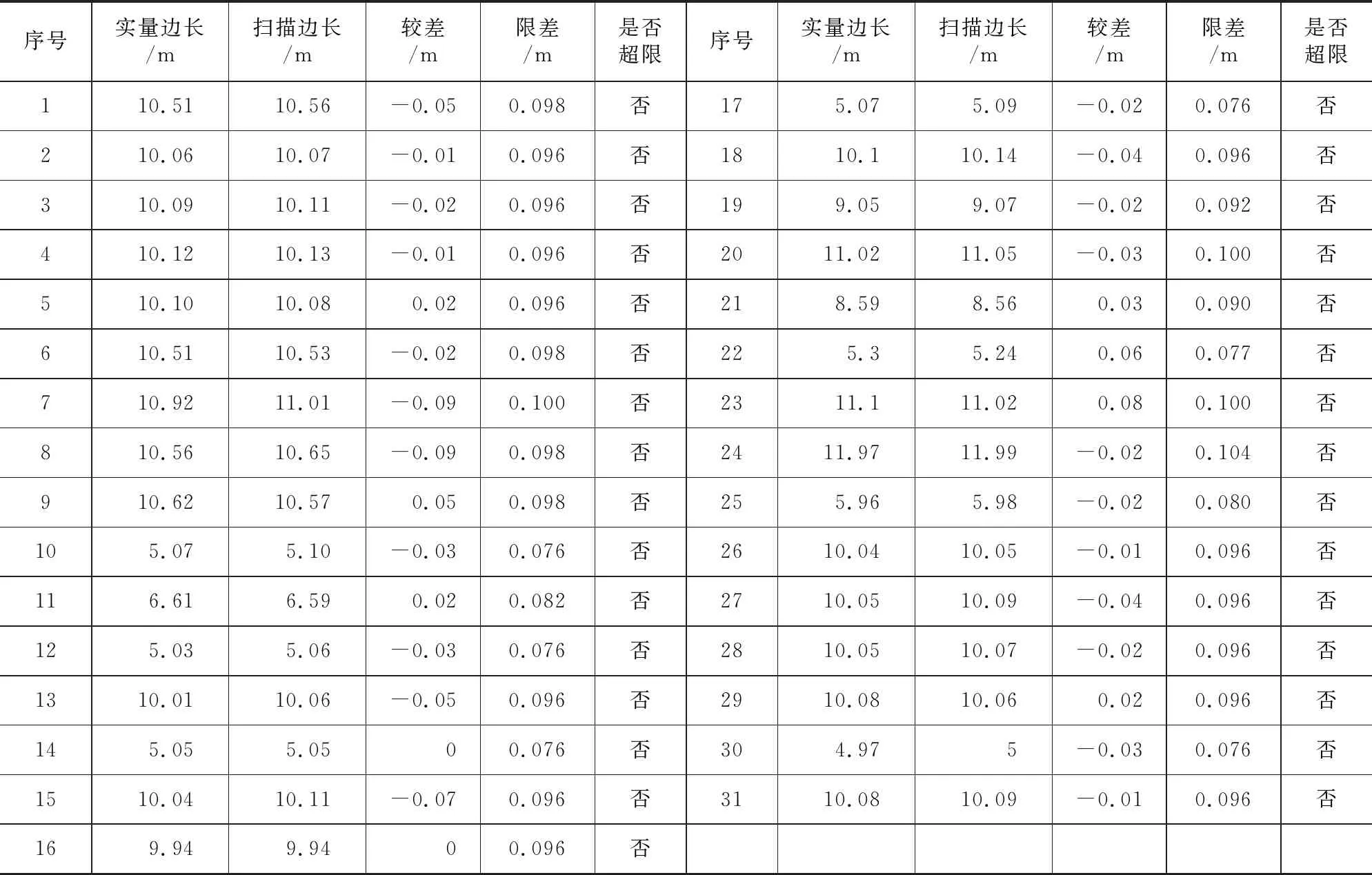
精度比对表 表3
由表3可知,随机选取31条边进行激光点云数据与实测数据比对,其单边较差最大为 0.09 m,最小为 0 m,从表中限差超限列可知,各边均为超限,边长限差采用三级计算公式(部分解析法),公式为:±(0.056+0.004D)。
4 结 语
本文提出的基于SLAM技术在农村“房地一体”测量中应用房地,这种作业方式相比传统的野外测量不仅节约了时间,同时提高了作业效率、减少了人力、物力的投入,更为重要的是,成果精度也很大程度上得到了保障。目前,三维激光扫描仪很多种选择,而针对这种小范围、密集度较高的房地一体化测量,手持式扫描仪作业方式灵活,仅用一人就可以完成外业扫描工作,作业时间可控,前期也可以进行扫描作业的整体规划。本文的技术手段可广泛地应用到1∶500高精度测量成果的项目中,这样,使用SLAM技术来完成房地一体化测量便具备了充分的可行性。
猜你喜欢
建材发展导向(2022年12期)2022-08-19 02:32:00
地理信息世界(2021年2期)2021-08-14 02:11:02
中国交通信息化(2019年3期)2019-06-18 11:07:36
江西建材(2018年4期)2018-04-10 12:37:50
电测与仪表(2016年16期)2016-04-12 00:25:32
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27 06:31:38
印制电路信息(2015年6期)2015-12-30 12:57:58
现代营销·经营版(2015年3期)2015-04-20 06:46:58
振动、测试与诊断(2014年6期)2014-03-01 01:14:55