一种光电搜索设备跟踪精度自动计算方法
2021-05-08 03:24
中国科技纵横 2021年1期
(中国飞行试验研究院,陕西西安 710089)
1.前言
1.1 背景
对于光电搜索设备试飞,其电视和红外跟踪精度是一个很重要的考核指标。当前光电搜索设备的跟踪精度的计算方法主要是跟踪视频进行人工判读,而人工判读视频耗时耗力,难以快速地获取某一跟踪航次或跟踪段的跟踪精度。以判读20s的视频,帧频为30,共600帧图像为例,人工判读一张图片的时间为2s左右,判读完成需要20min左右。以直升机为例,一个架次飞行2h,执行6~8个跟踪航次,每航次2~3个跟踪段,预计人工判读一个架次跟踪精度的耗时在4h~8h。因此,提高光电搜索设备的跟踪精度计算效率,既能解放人力,又能提高光电搜索设备的试飞效率。
1.2 需要解决的问题
在光电搜索设备的跟踪精度试飞中,需要靶标配试,一般为“田”字靶标或“十”字靶标。那么,如何快速的进行光电搜索设备的跟踪精度计算呢?笔者认为,需要解决3个问题:
(1)如何在跟踪视频或图像序列中快速定位配试靶标?(2)如何使计算机快速地获取靶标的特征点的位置信息?(3)如何快速匹配可用于后续跟踪精度计算的特征点的位置信息?
2.技术途径
2.1 快速定位靶标
光电搜索设备在跟踪目标过程中,其伺服系统会将目标锁定至视场中央,除非人工退出跟踪或跟踪丢失,目标一般不会脱离视场中央。因此,快速定位靶标可以通过鼠标点选获取跟踪段视频的目标区域(图像ROI,Region of Interest)。
2.2 角点检测
(1)跟踪精度计算方法。以图像上初始瞄准点为原点0,以电视/红外像面水平方向为x轴,垂直方向为y轴,在电视/红外像面上建立直角坐标系xoy,第i帧图像上电视系统瞄准十字线中心在x、y方向上距原点的坐标为pi(xi,yi)。
跟踪偏差角θi的计算公式如下:

ph—一个像素所占水平视场角;pv—个像素所占垂直视场角。
每个自动跟踪距离下的电视/红外跟踪精度δ按公式(2)计算。

式中:δ—每个自动跟踪距离下的电视/红外跟踪精度,mrad;n—每个自动跟踪距离下的有效数据个数。
因此,以第一帧的角点位置为基准位置,计算后续帧角点位置与基准位置的像素偏差,并依据公式(1)和(2)计算光电搜索设备的跟踪精度。因此,快速而准确地检测配试靶标(图像ROI)的角点成为关键的一步。
(2)Shi-Tomasi角点检测算法。角点检测(Corner Detection)是计算机视觉中用来获得图像特征的一种方法,广泛应用于运动检测、图像匹配、视频跟踪、三位建模和目标识别等领域中,是特征检测的一种[1]。角点通常被定义为两条边的交点,或者说,角点的局部邻域应该有两个不同区域的不同方向的边界。更严格地说,角点的局部邻域应该具有两个不同区域的不同方向的边界。
本文采用Shi-Tomasi角点检测算法进行角点检测。《Good Features to Track》中提出的一种Harris算法的改进[2]。式(3)为Harris角点检测的打分公式。

但Shi-Tomasi使用的打分函数见公式(4)。

即若两个特征值中较小的一个大于阈值T,则认为它是一个角点。将λ1和λ2绘制到λ1~λ2空间中,如图1所示,当将λ1和λ2大于阈值时,才认为所对应的像素位置为角点。
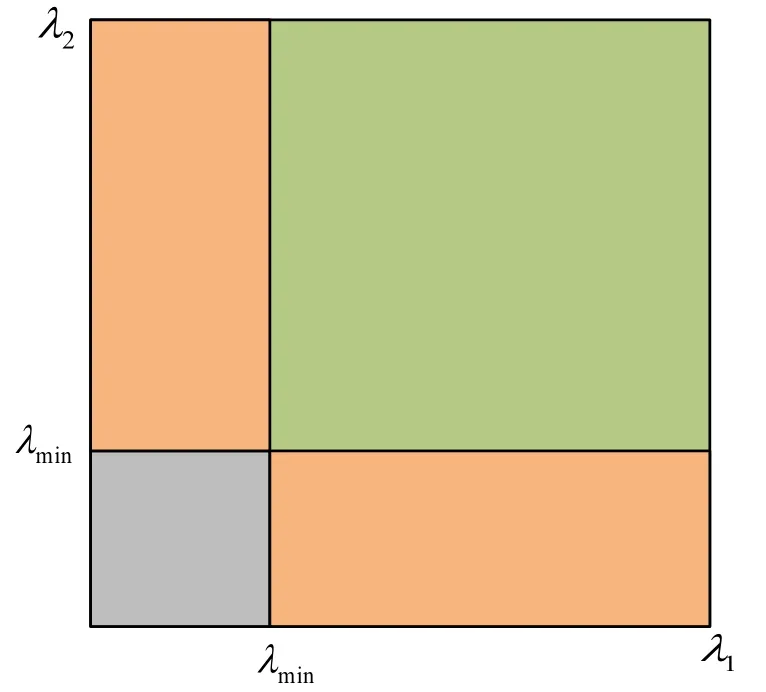
图1 Shi-Tomasi对应的λ1 ~λ2空间
2.3 角点匹配——距离度量
角点检测完成后,每一幅目标图像会生成一个角点坐标的集合Mi,i=1,2,3,…,N。此时,需人工判读图像初始帧可用于跟踪精度计算的角点,其坐标集合C0。依次找出Mi与C0中欧式距离最小的角点的坐标,最终生成匹配C0中角点的坐标集合,用于后续跟踪精度的计算。因此,从跟踪视频数据到快速计算出跟踪精度的流程图2所示。跟踪精度计算之前,需确定当前视场下一个像素对应的视场角。

图2 基于角点检测和距离度量的跟踪精度计算流程图
3.实验结果
以图3为例,能够用于后续跟踪精度计算角点为图中黑框所标示。其余角点不满足的原因是:(1)距离瞄准线十字太远,计算跟踪精度误差大;(2)有些角点为瞄准十字线的点,其位置固定,无法用于跟踪精度计算。

图3 角点检测结果
4.结语
本文提出的基于角点检测和距离度量的光电搜索设备跟踪精度的自动计算方法,提高了光电搜索设备的数据处理效率,进而提高试飞效率。但是,如何使计算机能够智能地判读第一帧图像中可以用于后续跟踪精度计算的靶标角点是后续的一个研究点。
猜你喜欢
中国光学(2021年6期)2021-11-25
军民两用技术与产品(2021年10期)2021-03-16
世界农药(2019年3期)2019-09-10
中国医疗设备(2019年1期)2019-01-15
电子科技(2016年12期)2016-12-26
光学精密工程(2016年4期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
肿瘤影像学(2015年3期)2015-12-09
激光与红外(2015年10期)2015-03-23
电子设计工程(2014年17期)2014-02-27