
基于机器视觉的五轴坡口切割机器人控制系统设计
2021-05-07 00:50张雪健毛业兵杨芳胡晓兵
焊接 2021年2期
张雪健,毛业兵,杨芳, 胡晓兵
(1. 四川大学,成都 610065; 2. 宜宾四川大学产业技术研究院,四川 宜宾 644600;3. 中国水电建设集团夹江水工机械有限公司,四川 乐山 614100)
0 前言
目前,大型工业设备的加工制造过程,如大型起重机、船舶、大坝主体等,一定会涉及到平板钢材的焊接加工,而焊接加工最重要的前置工序就是切割。为保证焊接质量,焊接零件边缘必须切出形状合适的坡口[1]。目前国内大部分企业的坡口切割仍然处于手工切割或者半自动切割。坡口切割过程的自动化改造,是车间自动化、智能化的重要部分[2]。为了研究坡口切割的智能化改造,该文设计了一种基于机器视觉的五轴坡口切割机器人[3]。这种机器人使用工业相机进行拍照,获取零件尺寸,依据工程图纸生成坡口切割要求参数和规划坡口切割路线,并将获取的2个零件轮廓进行配准,最终生成加工零件的切割路线[4]。这种坡口切割方式可以保证高效率、高精度、高质量的完成切割作业。
近年来,随着国内数控技术的发展,五轴数控技术逐渐应用到了坡口切割领域,此外一些新鲜技术,如计算机视觉技术,激光测距技术等,让坡口切割更加智能化。但是由于机床研究一般属于涉密项目,国外的研究资料尚未开源,因此国内尚无成熟的自主研发的坡口切割机器人,高自由度坡口切割机器人的开发在国内仍处于起步阶段。为了解决这一技术难题,国内有一些高校或企业在进行技术开发,例如哈尔滨工程大学研发出了一台基于工业CCD和工业结构光的五轴坡口切割机床[5]。该方案利用摄像机捕捉零件边缘点进行零件轮廓提取,并将轮廓规划为切割枪头运动轨迹。此方法在零件轮廓形状复杂的情况下效率较低。
该文设计的五轴坡口切割机器人的控制系统[6]以3个移动关节和2个回转关节实现机器人在工作空间内部的任意切割姿态。该文设计的控制系统上位机以C++的MFC模块和OPENCV视觉库为基础[7],下位机则以PLC控制单位为核心。通过设计上下位机各个功能模块,进而设计出一个完整的坡口切割控制系统。
该文设计的五轴坡口切割机器人的优势创新点主要体现在3个方面:①机械结构设计的优势。目前已有的五轴坡口切割机器人设计方案,大多为极坐标型,机器人关节为全回转关节,设计实现起来较为复杂。该文设计的机器人结构为直角坐标型,其有2个优势。首先,采用移动关节+回转关节的设计方案,可以简化机器人控制方案的设计。例如机器人移动和坡口切割定位传统的五轴回转机器人需要以5个回转关节同时进行旋转运动,而该文设计的机器人以简单的三维直角坐标移动确定,只需要3个移动关节即可。其次,在进行大型零件切割的过程中,坡口切割工作点距离机器人基坐标远点较远时,如采用传统的极坐标型机器人,在坡口切割机器人工作过程中,这个机器人的结构近似为“悬臂梁”,结构不稳定,造成精度的损失。而该文设计的机器人,以直角框架型结构定位零件坡口工作点,避免了“悬臂梁”结构的形成。②零件轮廓提取及修正方式的创新。传统的零件轮廓提取方式,如图割法、分水岭法,一般可以将人类肉眼可识别的目标前景提取,但是在选取过程中需要人工选取部分提取区域,因此无法快速、大量、自动的提取轮廓。哈尔滨工程大学研制出的基于机器视觉的坡口切割机床能够通过FREE链码进行轮廓跟踪,去掉部分毛刺、断点但对于面积过大的异常区域无法识别出。该文针对目前传统零件轮廓提取方案中存在的问题,提出了一种基于图像配准的高精度零件轮廓修正方法。首先,从零件工程图与真实图像当中提取出零件模板特征点集与待匹配特征点集;其次,对仿射变换模型中的参数进行分解分析,并利用两图特征点集中的面积特征与边缘结构特征构建准则函数;然后,使用改进的遗传算法搜索2个图像全局最高相似度所对应的仿射变换参数,在图像配准之后,再通过计算最优迁移后的模板轮廓点集与待匹配轮廓点集的分段Hausdorff距离来检测并替换待匹配轮廓中的异常轮廓段。试验结果表明,该方法能精确、稳定地检测出待匹配轮廓点集中的异常轮廓段。③运动控制方式的优势。该文通过深入分析和研究,将复杂的上位机运动控制指令进行简化编辑,保证运动信息合理分配在报文的数据区内。该文将运动控制信息进行编辑,设计成储存在一系列连续寄存器内的数字信息,例如将末端切割火焰枪的运动方式设置为01号寄存器,各轴运动方向设计为02寄存器等,并在寄存器内储存具体的运动信息,然后将所有的寄存器信息进行按照顺序的统一发送。这种方式不仅可以节约指令发送时间,缩短控制响应时间,也可以对下位机进行更加准确的控制。此外通过缩短下位机PLC的程序运行时间周期,确保运动指令的时效性。因此通过该文的运动控制方式,可实现机器人较为准确的运动控制。
1 设计方案
对于五轴坡口切割机器人系统的设计包括机械本体设计和控制系统设计两部分组成。该文五轴坡口切割机器人一般用于大型平板类零件的对接坡口切割,可以用来开V形和X形坡口,如图1所示。

图1 坡口形状
考虑到坡口切割的工作需求,计划使用五轴四联动的机械结构方式,由框架式的三移动关节与一个控制末端火焰枪位置的旋转关节组成四联动,然后再单独使用1个旋转关节控制末端火焰枪枪[8]。末端火焰枪由2个回转关节控制,一个回转关节用于固定火焰枪位置,另一个回转关节则依据坡口切割角度控制焊枪姿态。该文设计的机器人专门采用1个旋转关节去满足不同的坡口加工需求,根据机械结构可知,V轴可以实现0°~90°的旋转,即机器人可实现0°~90°内所有角度的V形坡口切割。此外通过翻转零件,同理与开V形坡口,机器人也可以实现0°~90°内所有角度的X形坡口切割,如图2所示。

图2 开坡口示意
2 机械结构设计
机器人机械本体具有5个自由度,可以在机器人作业空间内实现任意姿态的坡口切割作业,如图3所示。其中:X,Y,Z为3个作直线运动的移动关节,U,V为做旋转运动的回转关节。各个关节由关节电机驱动。

图3 五轴坡口切割机器人机械本体
3 控制系统整体设计
五轴坡口切割机器人的控制系统方案如图4所示[5]。控制系统包括上位机、下位机和工业相机3部分。其中上位机主要是PC端[9]的软件部分,包括图像采集模块、工程图读取模块、图像处理模块、轨迹计算模块、通讯模块和运动控制模块。上位机主要是进行数据的采集、收集、处理、发送及通过界面进行人机交互。下位机主要是由PLC控制单元和电路模块构成的硬件部分。下位机主要负责执行上位机发送的指令信息,对机器人机械本体各关节电机发送相关运动指令。工业相机主要是用来对加工零件的拍照,然后进行图像采集和处理,进而生成可以进行轮廓提取与匹配的零件图像信息。

图4 五轴坡口切割机器人控制系统方案
4 控制系统具体设计
4.1 控制系统上位机
4.1.1图像采集与处理部分设计
五轴坡口切割机器人的图像采集与处理部分主要由图像采集模块、工程图读取模块和图像处理模块3个模块组成。
图像采集模块主要是要获取待加工零件的形状尺寸,生成可以与工程图进行匹配的误差小于+/-0.5 mm的照片。图像采集主要分为2部分,一部分是多次拍照,另一部分就是对这些照片进行整合和拼接,形成完整的代加工零件照片。使用海康工业相机进行拍照,由于坡口切割作业过程中坡口切割车间和坡口切割零件的光线不可控,而且在坡口切割作业过程中已出现影响拍照质量的杂质,因此进行一次拍照可能无法获取完成的图像信息,因此需要进行多次拍照,获取不同相机位置的零件信息。图像拼接(图5)采用基于surf特征的图像拼接技术[10]。基于surf的图像拼接技术主要是对每幅图像进行surf的特征点的提取,然后对于特征点进行匹配,匹配完成后计算透视变换矩阵,然后将图像拷贝到另一幅图像的指定位置。

图5 图像拼接流程图
工程图读取模块主要是由设计人员设计绘制的加工零件标准图纸。加工图纸一般由Solidworks或者Auto CAD绘制[11],该文选择的是无加密的DXF文件格式。对于待加工的DXF文件,首先有按照图6流程进行读取。读取完成后,由于图像本身激素二值化图像,因此无需图像预处理和边缘提取。只需要通过边界跟踪算法和轮廓拓扑结构分析即可挑选出目标轮廓。

图6 DXF文件读取流程图
图像处理模块主要是由2部分组成,第1部分是针对于由图像拼接生成的零件全景照片进行预处理、图像形态学处理、边缘提取、轮廓提取[12],第2部分是针对于由零件全景照片提取出来的轮廓和由DXF文件获取的零件轮廓进行图像配准(图7)[13],进而生成代加工零件的坡口切割路线,具体的操作流程如下图所示。在图像处理模块中,图像配准是最为重要的部分。
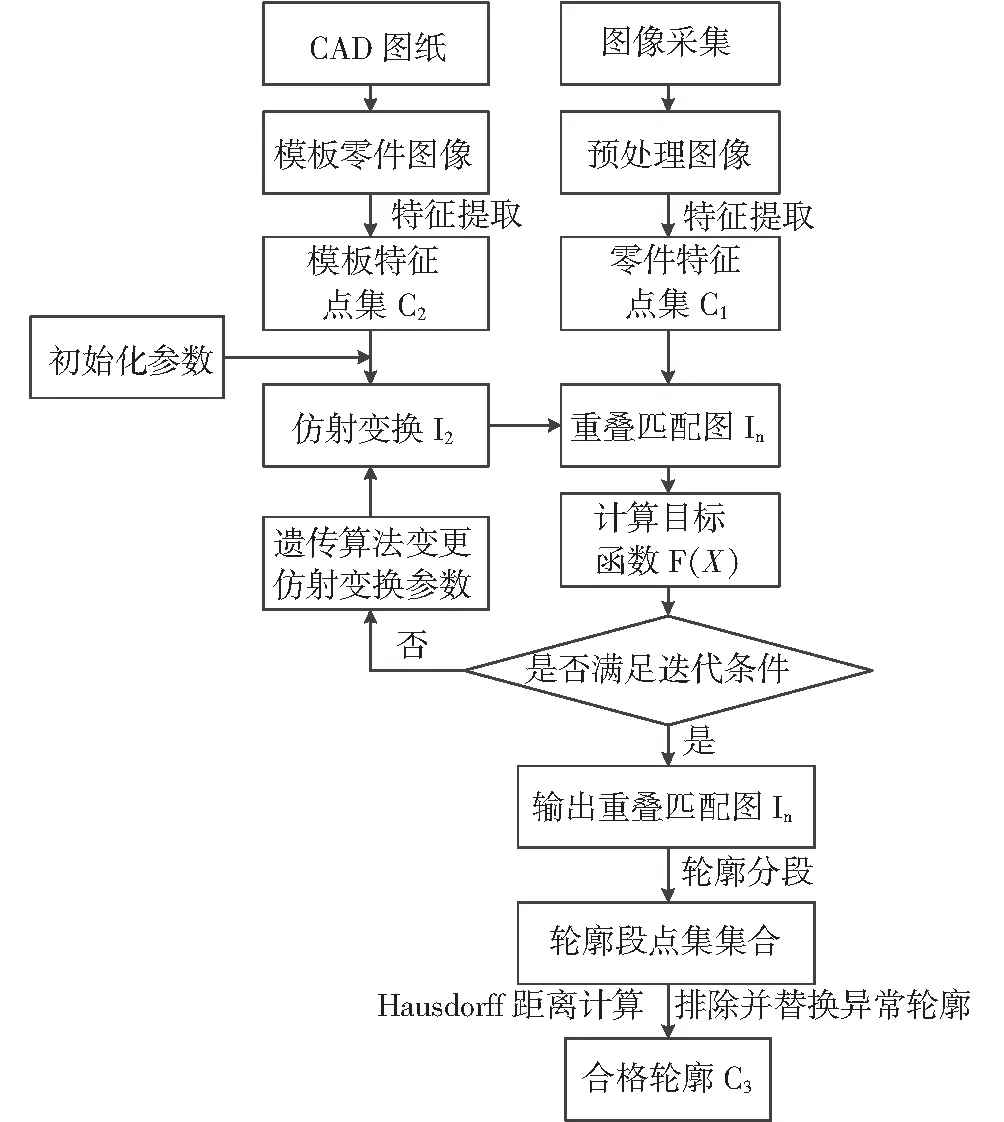
图7 图像配准流程图
4.1.2上位机、下位机通讯部分设计
通讯模块设计主要是对上位机PC端和下位机PLC端的信息传递方式进行设计规划。机器人通过上位机PC端进行数据的计算,然后下位机执行命令。该文下位机采用西门子S7-200 SMART PLC,其具有多种通讯方式并内置多种通讯协议。综合考虑研发和生产成本,采用其内置的RS485串行通讯结构,并采用工业领域较为成熟的MODBUS协议完成信息交换[14]。PLC1作为主站、PC机和PLC2作为从站,由主站PLC按照20 ms控制周期定时读写从机,PC机作为从机主要功能为计算数据将数据放入保持寄存器内等待主站PLC的访问,再整理为Modbus报文格式应答主站PLC,完成信息的交换。
4.1.3轨迹计算与运动控制部分设计
轨迹计算模块主要是讲图像处理后生成的零件轮廓点集转换为三维位姿点集,用于描述机器人末端位姿轨迹。由机器人正、逆运动学,通过机器人末端位姿点集逆推出机器人各关节的关节变量[15]。
运动控制模块主要是对由轨迹计算模块计算生成的机器人各关节变量进行运动指令编辑,进而生成可以进行上下位机间通讯的指令信息。机器人在完成一整套切割流程时机器人需要配合多个模块稳定完成多个功能动作,这个过程中上位机的命令编辑就发挥了巨大作用,对于不同功能,上位机都设定有不同编码,不同的数据存放类型,保证切割过程有序进行,指令整理之后还需要放入Modbus报文中的聚居区整合为标准Modbus协议格式发送,即可完成指令发送过程。该文设计的运动控制指令基于Modbus报文的格式,具体的运动指令保存方式见表1。
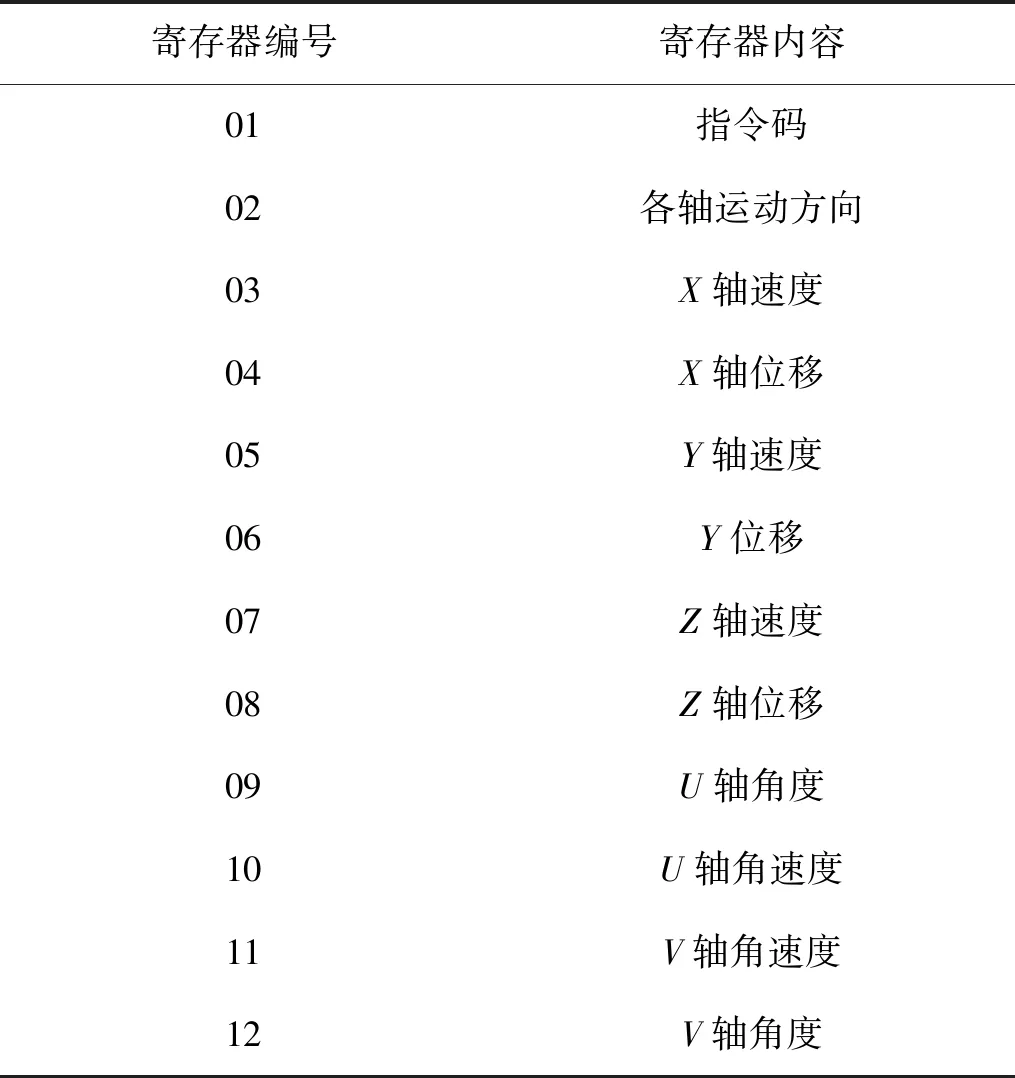
表1 运动指令保存方式
寄存器01中的指令码是该文满足机器人功能需求,模仿Modbus报文格式设定的一个数据位,不同的指令码对应不同的机器人功能表2描述了各功能码对应的意义。
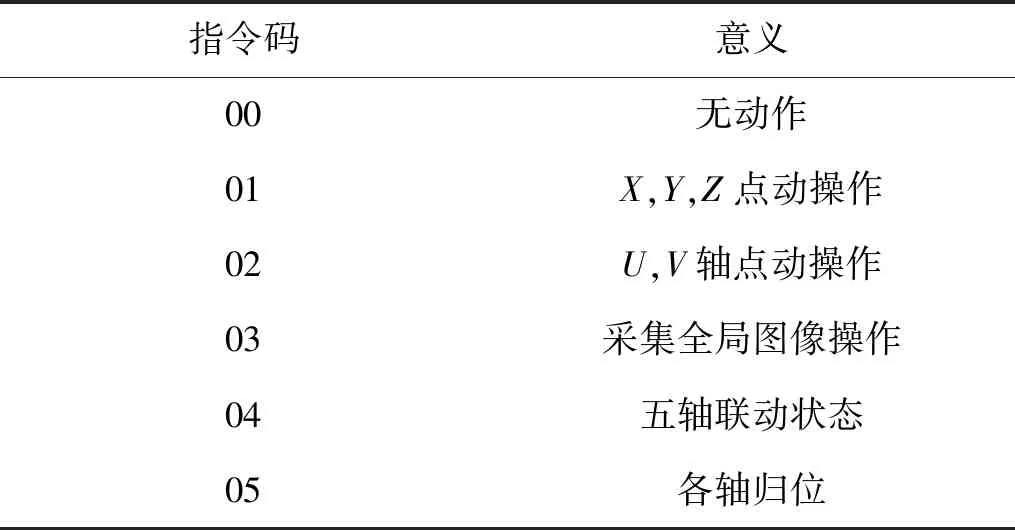
表2 指令码对应操作
当识别到同功能码上位机就会进入不同的工作状态,对后续指令的处理和通信时序都会发生改变。这在后文将详细介绍。X,Y,Z点动与U,V轴点动功能码不同,这是因为下位机处理XYZ与UV轴点动信号的方法不同,XYZ轴由主站PLC控制而UV轴由从站PLC控制。
4.2 控制系统下位机设计
4.2.1PLC控制单元设计
五轴坡口切割机器人的PLC模块选用西门子S7-200SMART PLC控制器进行逻辑控制。该控制器具有控制稳定,逻辑简单,运动控制实现方便的优点[16]。单个PLC可进行三轴的运动控制,故选用2个PLC以主站加从站的形式进行布置。PLC的通讯是基于MODBUS协议的。在整个机器人的工作过程中,全局图像的采集是由PLC主站完成,其余所有的功能都是由PLC主站和从站共同完成。主站PLC承担着全部控制系统的信息传递,其不但要和上位机PC端进行通讯,还要与从站PLC进行通讯,而且三者的硬件是互通的,如图8所示。
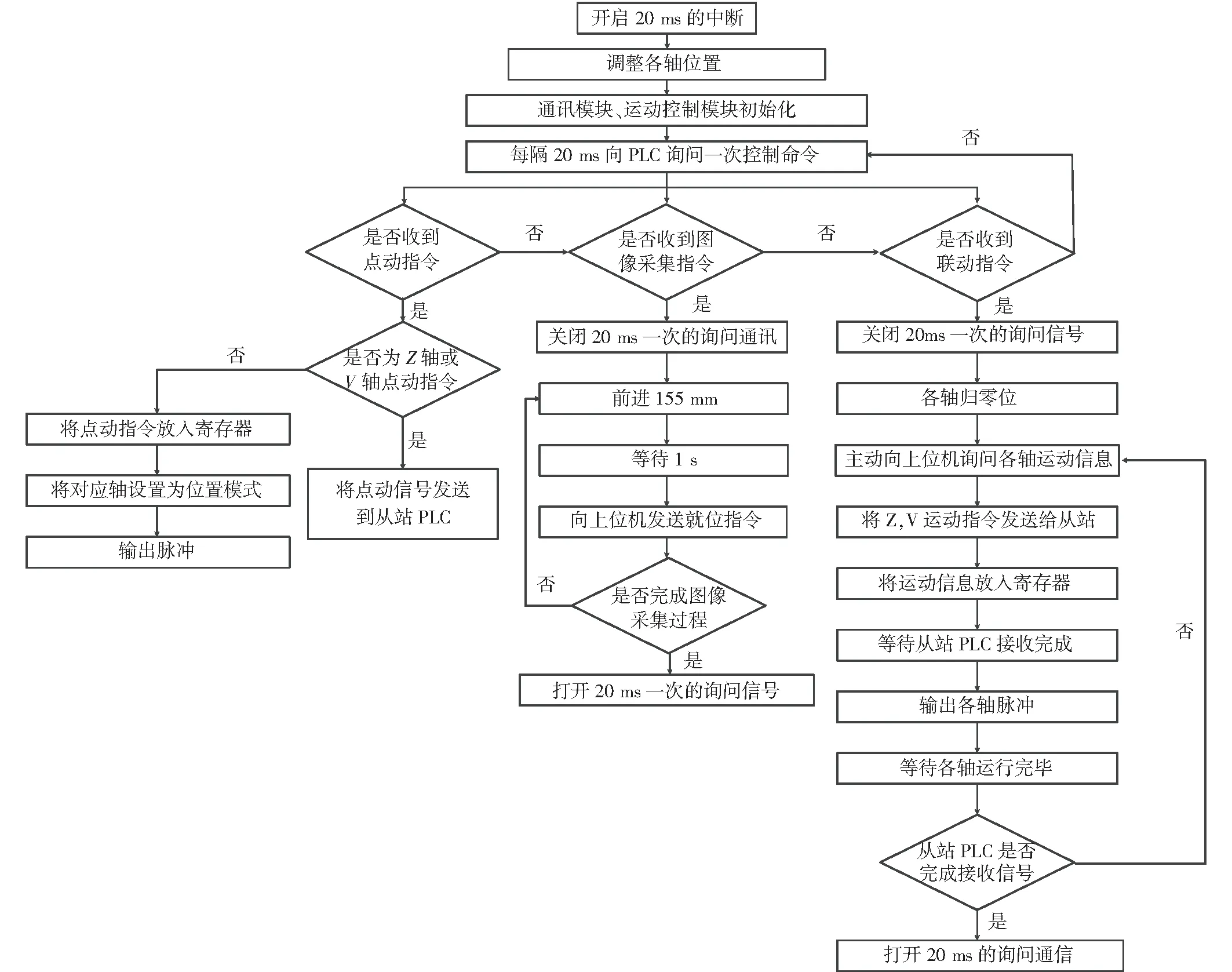
图8 PLC控制单元控制方案
4.2.2机器人电路模块设计
五轴坡口切割机器人为了保证零件切割的精度,除图像采集与处理模块生成的轮廓点集的准确之外,控制系统精确的位置控制也是关键。交流伺服电机和直流伺服电机在运动控制方面已经被广泛使用。伺服系统在启停特性、加减速特性、振动特性、响应速度等方面具有显著优势。故在“满足控制要求”的原则下,X,Z,U,V轴的关节电机选用直流伺服电机,Y轴由于负载较大,选用交流伺服电机。
4.3 机器人控制系统验证试验
根据以上控制系统的上位机、下位机部分的软、硬件设计方案和相机选型,搭建出五轴坡口切割机器人的试验系统,验证该文提出方案的可行性,所以末端用激光代替火焰,当激光照射在零件表面会有直径2 mm类圆形光斑,在试验平台运行过程中,光斑就会沿零件边缘移动,光斑的轨迹即代表火焰的切割点,为体现该文方案的可行性就将光斑的运行轨迹描绘出,为捕捉光斑的轨迹该文使用延时拍摄的方法,其效果如图9所示,红色的轨迹便是激光走过的路径,可以从图中看出光斑轨迹与零件的边缘轮廓大致重合,即证明该文提出的运动控制方案可行有效。此外通过试验系统验证可得,试验过程中,控制激光(模拟控制火焰枪)进行切割的V轴始终保持着一定的角度并与待加工零件的坡口切割工作面垂直,如图10所示。因此可以说明在工作条件一定的情况下,可以通过设定具体的切割角度去满足不同需求下的坡口切割作业要求。由于该文的研究只进行到试验室试验台系统下的模拟试验,因此具体的切割达标情况需要在生产现场进行实地试验进行验证。
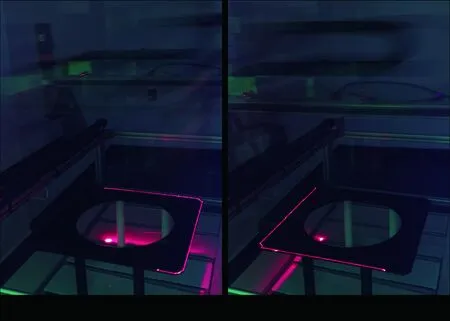
图9 五轴坡口切割机器人系统试验图
图10 运动过程V轴位置图
5 结论
从五轴坡口切割机器人控制系统整体结构设计出发,分别从上位机和下位机模块进行机器人控制系统的设计。该文设计出了以OpenCV和VS2015为基础框架的上位机模块和以西门子S7-200smartPLC为核心的下位机模块。然后通过试验台模拟试验,一定程度上证明了机器人控制系统设计的合理性。
猜你喜欢
热处理技术与装备(2022年5期)2022-10-26
汽车实用技术(2022年11期)2022-06-20
中国金属通报(2022年1期)2022-06-02
客车技术与研究(2020年6期)2021-01-04
中国新技术新产品(2020年6期)2020-06-19
电子技术与软件工程(2019年7期)2019-06-11
科技与创新(2018年1期)2018-12-23
车迷(2018年12期)2018-07-26
山东工业技术(2016年15期)2016-12-01
北京纪事(2016年5期)2016-05-07
