消费型倾斜无人机摄影测量技术在房地一体中的应用
2021-05-07 00:52:18韦福秀
矿山测量 2021年2期
高 叶,韦福秀
(浙江省测绘科学技术研究院,浙江 杭州 310000)
房地一体测绘主要为了保证地方政府能够及时掌握相关区域的不动产权属情况,以便对该区域土地利用及规划进行全方位的分析[1],该项工作外业工作量大、精度要求高[2]。目前,房地一体项目调查通常采用传统解析法、车载三维激光扫描仪、机载激光雷达等方法。由于地籍测量对界址点精度要求较高,按照国家测绘局颁布的《地籍测绘规范》[3]要求,使用权明显界址点精度中误差优于0.05 m,允许最大误差优于0.1 m。韩世静等采用GPS-RTK技术进行地籍测量,该方法存在作业效率低、易受外业天气影响问题[4]。贾宝等采用车载移动测量系统进行房地一体测绘,该设备成本较高难以推广[5]。吉绪发等利用无人机平台搭载激光雷达进行不动产调查,但构建的三维模型缺少纹理信息[6]。通过传统的航摄获取的影像数据具有丰富的纹理信息,经过影像空三、密集匹配以及纹理映射等处理可以生成纹理丰富的三维立体模型[7]。万祖海等尝试利用无人机搭载的Canon 5D摄影机进行大比例尺地籍测绘,验证该方法需要配合现场调绘的方式[8]。上述方法存在仪器设备昂贵、作业效率低、技术门槛高以及无法满足精度要求等问题。
鉴于此,本文提出采用消费型飞马D200多旋翼无人机为航摄平台,搭载五镜头的D-OP400倾斜测量模块应用于房地一体的项目,对韶关某区域进行地籍测绘,利用外业采集的控制点统计控制点中误差和地物平面位置精度,对消费型倾斜无人机摄影测量技术在地籍测绘方面的精度进行评价。
1 工艺流程
1.1 倾斜无人机摄影测量系统
(1)D200无人机是飞马机器人自主研发的垂直起降多旋翼无人机,采用四旋翼的十字布局形式,旋翼机型以其能够获取更高精度的航测数据、可悬停拍摄、对起飞和降落环境要求低等优势,兼具固定翼无人机航时长、速度高、距离远的特点,性能方面主打“高精度程度”,如图1所示,具体参数如表1所示。

图1 飞马无人机

表1 飞马D200飞行平台参数
(2)D-OP400倾斜摄影相机模块,采用全面幅微单相机,具备高质量的侧面纹理采集及高效率的作业能力,具备五相机同步曝光和逐相机打标能力,精确获取每个相机的精确曝光位置信息,搭配无人机管家数据处理模块,提供1:500免像控高精度倾斜航摄完整软硬件系统,同样的机位下采用同样的焦距和参数进行拍摄,全画幅比APS-C画幅获得的照片视角要广,能被市面上所有的工业级无人机挂载。一个镜头垂直向下,另外四个镜头均匀分布在四周、倾角为45°,如图2所示。倾斜模块参数如表2所示。

图2 D-OP400倾斜模块
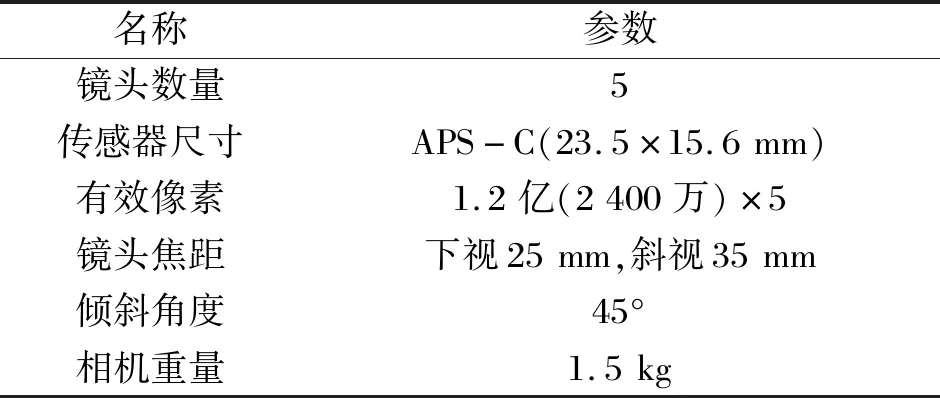
表2 D-OP400倾斜模块参数
1.2 数据处理技术流程
针对倾斜无人机摄影测量技术的特点,依据多视影像三维重建技术原理在房地一体项目中选择倾斜相机,再依次完成航线规划、采集影像数据、多视影像区域网平差、多视密集匹配生成点云数据、三维模型生成以及精度验证等步骤。具体流程参考地籍测绘的行业技术规范,制定流程图如图3所示。

图3 倾斜无人机摄影技术房地一体流程
2 项目应用
2.1 测区概况
本次项目所在测区地势平坦,地形高差在10 m以内。主要地物为1~3层房屋、农田、池塘、树林等。测区房屋不高,地形起伏不大,飞行区域高空无特殊危险源,选取飞马D200多旋翼无人机搭载D-OP400五镜头倾斜摄影相机,并使用全站仪与RTK外业采集控制点进行后期检查模型精度。作为经济型倾斜相机,D-OP400的性价比很高,适合于多机组、大范围同时开展作业,提升项目完成效率。价格相对低廉,但它在精度方面不逊色于市面上的同品质相机,可保证最终成果达到项目要求。航飞当日,无人机作业时间为下午13~15点,在该时间段内,测区内天气晴朗,光线适中,1~2级微风,适合飞行。测区内使用全站仪均匀实测13个控制点,点位清晰易辨认,其分布如图4所示。

图4 控制点分布图
2.2 航线设计
本次项目中,设计的航高为90 m,地面分辨率(GSD)为1.5 cm,按照常规地籍测量航向、旁向重叠度分别为80%、70%进行作业。测区有效面积约0.15 km2,按照外扩一倍航高的距离,所得实际航飞面积约0.31 km2,累计飞行2个架次,单架次飞行时间约25 min,共获取5 335张影像,航片地物轮廓清晰、色彩均匀,满足项目的使用要求。本次项目航线规划如图5所示。

图5 航线规划图
2.3 数据处理及模型效果
2.3.1 空三解算
将倾斜无人机摄影测量系统采集的多视影像数据,利用Skyscanner数据预处理软件进行初步的整理,利用计算机视觉中影像匹配技术获取多视影像数据的连接点坐标,通过核线约束剔除误匹配点[9],采用最小二乘匹配方法[10]提高同名点的定位精度;结合外业采集控制点数据利用Photomesh软件进行空三解算,通过一次估算与精算对测区内5 335张影像进行区域网整体平差处理,处理时间约3 h,空三解算一次通过,未发生分层等问题。空三解算完毕后,输入外业控制点像点坐标,利用空三解算结果计算外业控制点对应的物方空间坐标,模型误差为0.018 m,即一个像素中误差;空三处理过程中控制点参数影像定向参数精化过程,因此控制点的平面精度仅为0.006 m。
2.3.2 实景三维模型构建
利用多视影像密集匹配技术获取高密度的点云数据,将点云数据构建不规则三角网模型并剔除模型内部存在错误的点云;通过纹理自动映射技术获取纹理数据与三角网模型间的一一对应关系,最终生成具有真实纹理的实景三维模型。生成的实景三维模型包含高密度点云数据、不规则三角网以及真实纹理信息。由整体三维模型图6(a)可以看出:生成的实景三维模型整体效果较好,能较好的反映当前该区域房屋分布情况。由局部细节模型图6(b)、(c)可以看出:三维模型的侧面纹理信息比较丰富,房屋整体结构清晰,在屋顶、屋角处不存在变形情况,便于后期直接在三维模型上量测矢量信息。
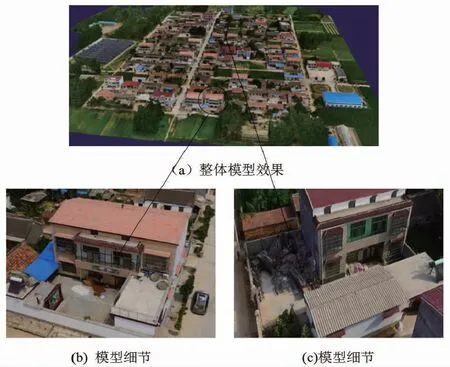
图6 实景三维模型图
利用多视影像数据生成立体模型,采集大比例尺地籍图存在模型精度误差分布不均匀、粗差多等问题[11]。利用正视视图中边线的方式显示模型,并将三维的测图工作转换为二维测图,在二维模式下能够轻易采集到房角点。通过不同视角的旋转、缩放,获取整个待采集测区的细节特征,确保地籍测图的精度及高效性。
2.4 精度表
将整个试验区域数据采集完毕,测试区域成果能符合地籍测图0.05 m要求。按照《地籍测图规范》精度统计要求,实地采集房屋的角点进行精度分析[12]。利用外业采集的实测数据与立体模型上采集对应数据进行统计分析,检验63个界址点的实测精度与绘图精度的差值,最后统计所有点的X方向中误差为0.027 m,Y方向中误差为0.019 m以及平面中误差0.033 m,满足项目要求。精度校验结果如表3所示。

表3 界址点精度统计表格/m
3 结 论
本项目采用消费型倾斜无人机摄影测量作为技术手段,通过无人机外业航飞、像控测量、三维模型制作、线划图采集等流程,生产房屋不动产登记所需的地籍和房产测量数据。综合来讲,飞马D200多旋翼无人机加D-OP400倾斜相机的组合,能够满足使用需求。相比于传统人工测图方式,无人机倾斜摄影技术在效率上有了提升。对于地形及高空环境不复杂的区域,无人机倾斜摄影技术的进步在减少测绘外业人员的工作强度、提升项目作业效率方面有着重要意义。本文没有考虑不同控制点分布以及数量对空三精度的影响,这也是下一步工作研究的方向。
猜你喜欢
西部交通科技(2021年9期)2021-01-11 12:55:36
软件(2020年3期)2020-04-20 01:45:18
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:00
智能建筑与智慧城市(2018年11期)2018-11-28 09:04:14
中国资源综合利用(2017年2期)2018-01-22 02:45:02
北京航空航天大学学报(2017年4期)2017-11-23 05:48:22
Coco薇(2017年8期)2017-08-03 15:23:38
中国工程咨询(2017年12期)2017-01-31 02:56:54
Coco薇(2015年5期)2016-03-29 23:22:15
中国房地产业(2016年2期)2016-03-01 01:25:35