GAMIT/GLOBK数据解算误差影响分析*
2021-05-07 01:43:40苏晓庆
矿山测量 2021年2期
苏晓庆,王 晖,徐 工
(山东理工大学 建筑工程学院,山东 淄博 255000 )
在处理高精度数据时,通常使用无电离层组合消除一阶电离层延迟,但残余的高阶电离层项延迟也会对定位结果产生厘米级的影响。对流层延迟在天顶方向的误差约为2.3 m,低高度角的误差最大可达20 m,是高精度数据处理不可忽略的影响因素[1]。在沿海地区,海潮负荷引起的形变可达数厘米,因此在GPS高精度数据处理中必须考虑海潮负荷的影响[2-3]。目前,已有大量的研究人员分别对上述误差改正进行了详细的研究,但在实际工程应用中缺少对各种误差改正的综合分析。因此,本文采用GAMIT/GLOBK对GPS控制网静态数据进行解算,综合考虑高阶电离层影响和基线解算模式、映射函数模型和对流层参数、概略坐标误差、海潮负荷和固体潮模型对解算结果的影响,结合本次实验项目,分析和设计静态数据解算策略,提高数据处理精度。
1 GPS数据解算影响因素
1.1 电离层延迟
电离层延迟是GPS数据采集与处理过程中的重要误差源,如何削弱电离层延迟的影响是提高定位精度的关键因素。载波相位一阶、二阶和三阶的电离层延迟量可以表示为:
(1)
式中,δ1、δ2、δ3分别为一阶、二阶和三阶电离层延迟量;Ne为自由电子密度;B为站星连线与电离层薄层交叉点处的地磁场强度;θ为卫星信号矢量与地磁场强度矢量在电离层交叉点处的夹角[4]。
1.2 对流层延迟
GPS测量中常用的对流层延迟改正模型有霍普菲尔德(Hopfield)模型、萨斯塔莫宁(Saastamoinen)模型等,GAMIT对流层延迟改正的缺省模型是SAAS模型[5-6],即:
(2)
E′=E+ΔE
(3)
(4)
a=1.16-0.15×10-3h+0.716×10-3h2
(5)
式中,h为测站高程;Ps和es为测站上的气象元素,分别为气压和水汽压;E为卫星高度角;ΔS为对流层折射改正。
信号传播路径上的对流层延迟STD与测站天顶方向的对流层延迟ZTD(Zenith Tropospheric Delay)间有如下关系:
STD=m×ZTD
(6)
式中,m称为投影函数,是卫星高度角E以及其他因素的函数,其好坏将直接影响对流层延迟改正的效果。
1.3 测站概略坐标误差
概略位置坐标由接收机提供,其精度能够影响周跳探测能力的好坏,概略坐标误差越大,周跳探测能力越弱[7],即基准站坐标的精度将影响基线解算的精度,最大影响可以表示为:
ΔL=0.60×10-4×L×Δε
(7)
式中,ΔL为测站概略位置坐标对基线的影响;L为基线长度;Δε为测站坐标的误差。
1.4 海潮、固体潮负荷
海潮负荷对基线分量和测站坐标都有一定的影响,在GPS数据处理中顾及海潮负荷的影响,可以提高解算结果的精度。海潮负荷改正用下式表示[8]:

(8)
式中,LΔU、LΔE和LΔN分别为t时刻海潮负荷所引起的测站径向、东西方向和南北方向位移变化;ρ为海水密度;φ、λ为测站的纬度和经度;φ′、λ′为球坐标系下海洋潮汐负荷点的纬度和经度;Hi(φ′,λ′,t′)为点(φ′,λ′)处第i个分潮的瞬时潮高;A为测站到积分面元的方位角;Gl(Ψ)和Gr(Ψ)分别为横向和径向质量负荷格林函数,其中Ψ为球面角。
GAMIT在进行数据处理,应用固体潮改正模型时,由于三阶潮汐影响比较小,故只考虑二阶引潮位的影响[9-12]。二阶潮汐对测站位移的影响:
(9)

2 案例分析
为提高静态数据的解算精度,更好地分析误差对解算结果的影响,针对某矿区地表形变监测控制网进行高精度解算,专门采用中国周围精度较高的9个IGS站(AIRA、BJNM、CHAN、SHAO、TNML、WUH2、URUM、ULAB、YSSK)作为基准站,该控制网共有6个点(分别命名为JZ01、JZ02、JZ03、Q025、Q040、Q041)。
2.1 基线解算模式影响分析
要获得高精度测站定位结果,需要顾及高阶电离层的影响[13]。本文考虑了电离层二、三阶改正,其中VETC值来自IONEX文件,采用IGRF13地磁场模型。GAMIT提供多种基线解算类型:(1)适合长基线的LC_AUTCLN解(基于伪距求解宽巷模糊度的LC解);(2)适合长基线的LC_HELP解(基于电离层约束求解宽巷模糊度的LC解);(3)适合短基线的L1_ONLY解(双频观测中的L1解);(4)适合短基线的L1L2_INDENT解(双频观测中独立的L1、L2组合差分解)等[14]。
各测站相隔距离为8~20 km,均属于短基线(短基线<100 km)。如果利用LC_AUTCLN或LC_HELP基线解算模式,将IGS站作为基准站去解算测站,会涉及长短基线混合解算的情况。GAMIT每次解算只采用一种基线解算模式时,LC_AUTCLN对各种误差进行模型改正,适合长基线解算。测站间隔短,环境相关性强,则采用差分L1L2_INDENT解算模式较合适。为了分析长短基线并存对解算结果的影响,设计了两种解算方案进行测站坐标解算,不同方案的解算坐标差值如表1所示。
方案一:采用LC_AUTCLN解算方法,利用9个IGS站共同解算6个控制网测站的坐标。
方案二:采用LC_AUTCLN解算方法,利用9个IGS站逐个解算6个控制网测站的坐标。
方案二分成6个GPS基线网,逐个解算6个测站坐标,此时各GPS基线网中不存在短基线,工作效率降低,但解算精度明显提高,从表1可以看出,基线解算模式会对解算结果产生毫米级的影响,并且对平面方向的影响要大于高程方向。本次实验项目中,平面精度最优提高6.52 mm,高程精度最优提高3.98 mm,因此,在实际项目中对精度要求高时,可以采用方案二模式。
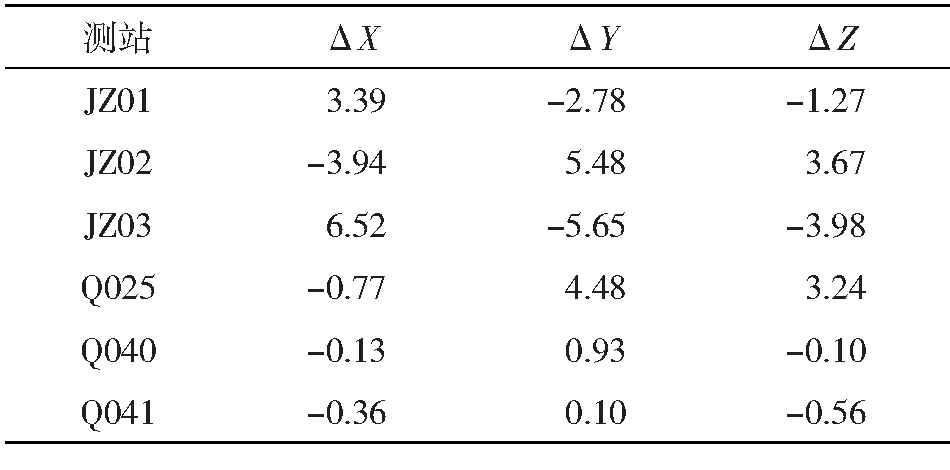
表1 两种方案测站坐标解算差值/mm
2.2 对流层延迟影响分析
GAMIT在对流层改正方面有很大的优势,其利用SAAS改正模型所求的对流层延迟改正值仅视为一种初始近似值,在数据处理过程中,仍把对流层延迟当做未知参数,通过平差计算去估计其准确值。GAMIT采用分段线性法,该方法将整个时段分为若干个区间,每个区间各引入一个参数。如果一天内测站天顶方向天气变化很大,则需要引入较多的参数,而引入的未知参数较多,易导致法方程秩亏,即矩阵不满秩的情况。本文以YSSK、CHAN基站为例对对流层参数个数的选取进行讨论,解算IGS基准站得到的坐标差值如图1所示。其中,坐标差值为解算得到的IGS坐标与ITRF2014提供的IGS坐标较差。
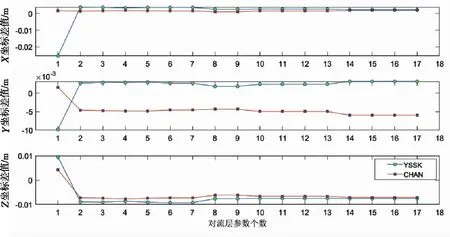
图1 不同对流层参数个数解算基准站坐标差
从图1可以看出,随着对流层参数个数的增多,解算坐标差值缓慢减小,当参数个数超过10个以后,测站坐标差值变化平稳。因此,在该实验项目中,在测站坐标单日解算中,对流层参数设置为8~10个时差值最小,解算结果最佳。
GAMIT 目前支持 GMF(Global Mapping Function)、NMF (Neill Mapping Function)和 VMF1(Vienna Mapping Functions 1)三种映射函数,但只有 VMF1需要引入模型文件。本文讨论了三种映射函数对基准站坐标解算的效果,结果如表2所示。
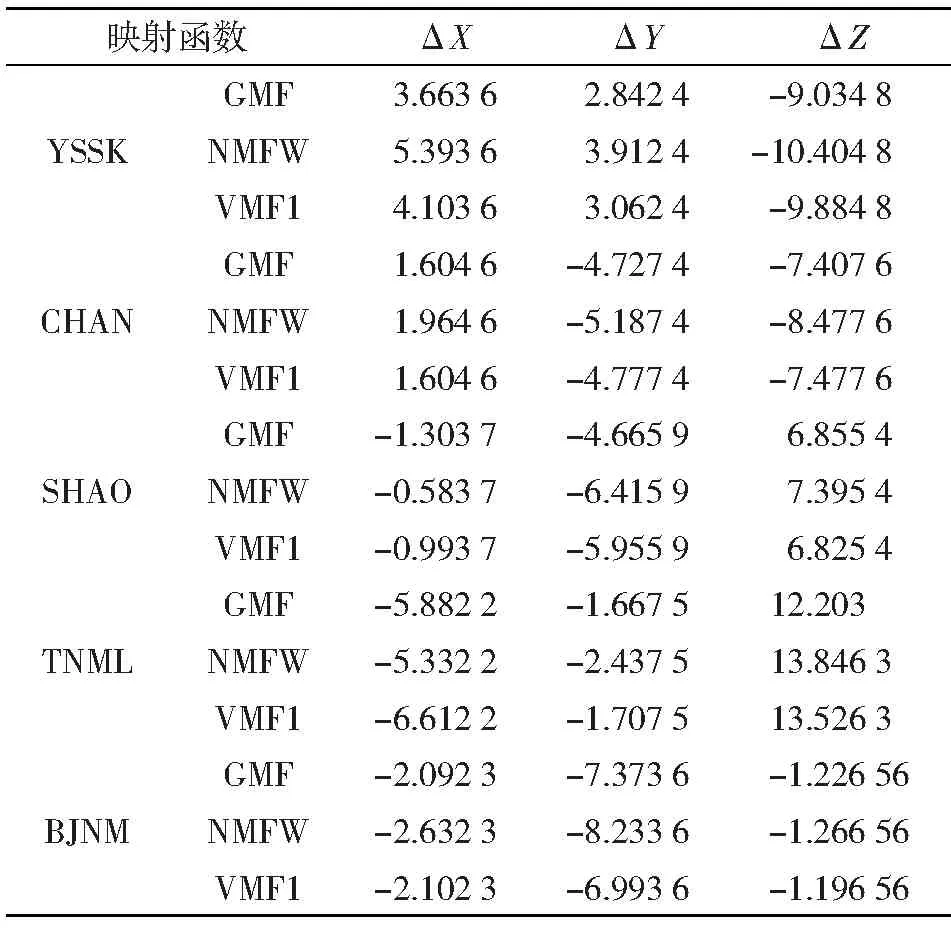
表2 不同映射函数基准站解算得到的坐标差值/mm
从表2可以看出,采用GMF映射函数解算精度最高,VMF1映射函数精度次之,NMFW映射函数精度最低。因此,在相似情况下,高精度定位中建议使用GMF映射函数。
2.3 概略坐标误差影响分析
在利用GPS进行定位时,高程方向受对流层、电离层等误差因素的影响远远大于水平方向,且地表监测网对高程坐标精度有很高的要求。本文针对基准站和控制网测站高程概略坐标误差对解算结果的影响,采用以下两种方案进行分析。
方案一:对9个IGS基准站高程坐标分别加入15 m、10 m、8 m、7 m、6 m、1 m、0.5 m、0.1 m误差。方案二:对6个测站高程坐标分别加入15 m、10 m、8 m、7 m、6 m、1 m、0.5 m、0.1 m误差。高程方向概略坐标加入误差与不加误差解算得到的坐标差值,结果如表3所示。

表3 测站高程方向解算坐标差/m
从表3可以看出,当基准站的概略坐标高程误差大于7 m时,会对解算结果造成很大的影响,当基准站概略坐标误差小于6 m时,GLOBK对基准站实行紧约束固定参考框架,对解算结果的影响很小。本文在解算过程中对基准站实行紧约束,所以控制网测站高程方向的概略坐标误差不会对解算结果产生影响。
2.4 海潮、固体潮负荷影响分析
GAMIT提供了4种海潮模型,otl_CSR4.grid、otl_FES2004.grid、otl_GOT00.grid和otl_NAO99b.grid模型,文献[15]针对GAMIT提供的4种海潮模型对基线的影响进行分析,得出NAO99b海潮模型适合山东地区高精度测量,该海潮模型是由日本天文台提出的,因此在日本和黄海等周围海域也有很高的精度。
本文讨论加载与不加载海潮模型改正对测站坐标的影响,解算结果如表4所示,可以看出,Z坐标的影响大于X、Y坐标,Z坐标差值最大为1.87 mm,在GAMIT/GLOBK中加载和不加载海潮模型改正对测站坐标解算影响不大,都可以满足一般工程要求。
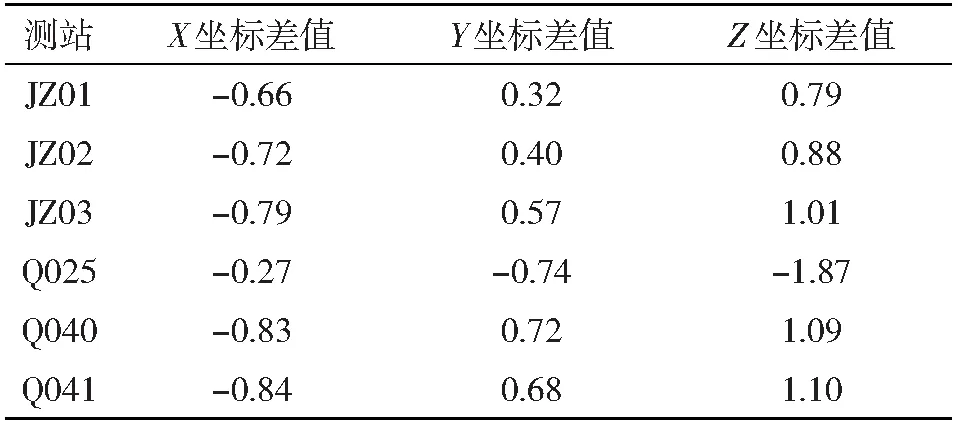
表4 控制网测站加载与不加载海潮模型解算得到的坐标差值/mm
下面选取JZ02站相关基线进行分析,从表5可以看出,随着基线长度的增加,海潮模型对基线差值的影响越大。基站分布对解算结果也有影响,总体来说,海潮模型对基站在沿海的影响要大于在内陆的影响。

表5 海潮模型对JZO2控制网测站基线的影响
需要特别注意的是,短基线解算时,固体潮对两个测站间的影响相近,在差分解算时可抵消。对于长基线解算,测站间隔较远,所受到固体潮的影响是不一样的,所以利用GAMIT进行长基线解算时,不可忽略固体潮的影响。GAMIT在解算时进行潮汐、非潮汐大气负荷改正,使用麻省理工学院提供的大气负荷位移全球格网数据,在数据解算过程中,根据大气负荷格网数据,我们内插出了测站处的大气负荷位移,并对观测值进行改正。
GAMIT/GLOBK提供使用IERS96、IERS03、IERS10三种固体潮模型,本文在GAMIT/GLOBK中使用不同固体潮模型对解算结果的影响进行分析。
如表6所示,在使用IERS10和IERS03模型进行解算时,测站Y坐标差值最大为2.52 mm,使用IERS96与IERS10模型解算得到的Y坐标差值达到3 mm,总体来看,差值较小,解算时采用IERS10模型即可。
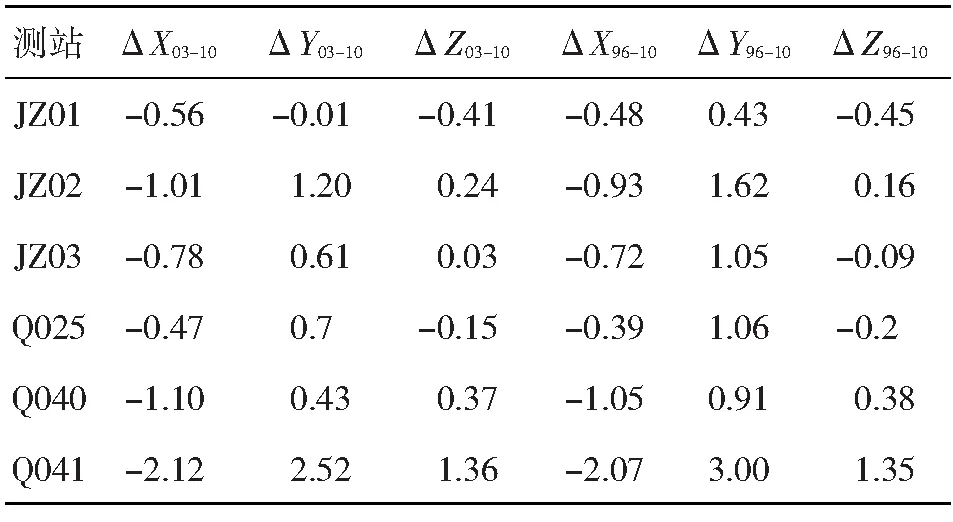
表6 不同固体潮模型测站坐标解算差异/mm
3 结 论
通过实验结果对比分析,基线解算模式、对流参数和概略坐标对解算结果的影响较大。数据解算时最好按照同种基线类型共同解算,不同类型分步解算。对流层参数个数也会对解算结果产生影响,随着参数个数的增加,解算精度随之降低。较大的基准站概略坐标误差会对解算结果产生很大的影响,数据解算时需将概略坐标误差控制在7 m以内。海潮模型对解算结果影响较小,此外,各种映射函数和固体潮模型解算得到的坐标值相差较小,采用GMF映射函数模型和采用最新IERS10规范中的固体潮模型即可。需要特别注意的是,分步解算的工作效率会有所降低,对于本文所提出的长短基线混合情况,解算模式的选择和计算效率的提高还需进一步研究。
猜你喜欢
韶关学院学报(2022年4期)2022-04-11 11:12:16
空间科学学报(2021年4期)2021-08-30 08:31:16
区域治理(2021年14期)2021-08-11 08:57:30
空间科学学报(2021年2期)2021-07-21 08:43:28
老友(2017年7期)2017-08-22 02:36:50
雷达学报(2017年6期)2017-03-26 07:53:02
载人航天(2016年4期)2016-12-01 06:56:24
新农业(2016年23期)2016-08-16 03:38:17
成都信息工程大学学报(2016年6期)2016-06-01 12:10:06
导航定位学报(2015年2期)2015-06-05 09:27:34