
基于事件触发的孤岛微电网二次协调控制策略
2021-05-06 02:33
浙江电力 2021年4期
(上海电力大学 自动化工程学院,上海 200090)
0 引言
随着DG(分布式电源)的快速发展,越来越多的DG 被集成到并网模式或者离网模式的微电网系统中来。并网运行时,微电网系统的电压和频率由主电网控制,同时实现与主网之间的功率交换。孤岛运行模式下,要求微电网系统自行维持频率和电压的稳定,以及实现有功和无功分配。文献[1-3]提出了分层控制机制,其中初次控制采用下垂控制[4-5],由于传统的下垂控制会导致系统稳态频率和电压偏移,因此需要靠二次控制来补偿频率和电压偏差,同时使得频率和电压与设置值同步。
微电网二次控制是通过电压和频率的给定参考值,计算得到相应的调整量,反馈给初次控制并进行补偿。传统通信方法是通过集中控制方式,即利用微电网中央处理器检测系统的电压和频率,使用比例积分控制器为初次控制设置参考值[6]。虽然在集中式下响应速度快,系统收敛迅速,然而却存在通信和计算负担重、鲁棒性差、可扩展性差等缺点,而且实时性、可靠性、安全性要求高,稍有不慎遭受攻击,造成的后果往往非常严重。因此,这种通信结构不经济又不可靠[7]。
为了克服集中式控制的弊端,人们又提出了分布式多智能体系统结构并用于孤岛微电网的二次控制中。目的是将微电网中的DG 看作系统中的智能体,同时将电压和频率期望值设置为虚拟领航者,各个DG 通过与相邻DG 进行信息互换实现自治运行,同时所有的DG 相互协调完成控制目标,从而避免了集中控制器的缺点。文献[8-9]将微电网二次控制问题转化为多智能体系统追踪同步问题,只需小部分DG 直接访问领航者,电压和频率可以通过相邻智能体之间的通信来准确恢复到参考值。为了解决孤岛微电网中有功功率和无功功率耦合带来的电压和频率之间相互影响的问题,文献[10-11]分别提出了分布式固定时间控制方法和分布式均值法。进一步地,文献[12]利用内模设计方法,保证了功率按照下垂系数分配。文献[13-14]则是从离散化角度来设计频率、电压二次协调控制。上述方法均是基于周期性采样控制的,这意味着各DG 之间的通信负担大,而实践应用中通信带宽是有限的。因此,有必要减轻通信负担以使得通信网络更加高效。近年来,为了解决通信资源有限的问题,出现一种非周期采样——事件触发控制机制[15]。事件触发控制机制是指控制任务按需执行,在保证控制性能的前提下,减少通信主体之间的通信次数,避免了大量的冗余信息传输。事件触发控制不仅需要设计事件触发函数,还需证明其具有最小事件间隔时间(排除Zeno 现象)。文献[16]将事件触发控制应用于多混合储能的孤岛微电网的分层协调控制中,通过减少系统事件触发次数来达到节约通信资源的目的。
综上所述,本文考虑到通信负担,利用多智能体系统的追踪一致性,对二次电压和频率协同控制器进行设计分布式事件触发函数,使得DG的输出电压和孤岛微电网的频率恢复到虚拟领航者给定的参考值。需要注意的是,电压二次控制中采用的无功功率直接为滤波后的无功功率,减少了辅助控制器的复杂度。通过稳定性分析,证明了控制方案满足Lyapunov 稳定性,这意味着DG 的所有输出电压和频率都可以与参考值同步。并通过可行性分析,确定了事件发生时间间隔的下界,以防止在有限时间段内触发无限事件。理论分析和仿真结果均验证了分布式事件触发二次协调控制策略的可行性。
1 微电网的分布式控制结构及图理论
1.1 微电网的分布式控制结构
典型的DG 微电网结构如图1 所示。DG 利用闭环保持电压和频率稳定,同时根据反馈信息自动分配有功和无功负荷。DG 拓扑结构组成包括能量源、逆变器、LC 滤波器、功率控制器、电流控制器。

图1 微电网分布式控制结构
通常可利用P-ω 和Q-v 下垂机制实现[17]:

式中:ωi,vi分别为第i 个DG 的输出角频率和电压幅值;ωni,vni分别为一次角频率和电压幅值参考值;Pi,Qi分别为第i 个DG 有功功率、无功功率输出值;Dpi,Dqi分别为频率、电压幅值下垂系数。通常,可以通过2 个如下的一阶低通滤波器来获得输出有功功率Pi和输出无功功率Qi[18]:

式中:ωc为低通滤波器截止频率,本文取31.25 rad/s;pi和qi由功率计算模块计算得出[19]。

式中:vdi和vqi分别为第i 个DG 中滤波电容电压的d 轴和q 轴分量;iodi和ioqi分别为第i 个DG 中线路电流的d 轴和q 轴分量。控制器在dq 坐标下进行设计,电压参考值基于d 轴定向,则有vdi=vi和vqi=0。
1.2 图理论
设通信拓扑图由G=(V,E,A)刻画,其中:V={1,2,…,N}表示顶点非空有限集,E∈V×V表示边集,A=[aij]∈RN×N表示加权邻接矩阵。如果在任何节点i 和节点j 之间存在路径,则拓扑图G 被称为连接图。如果存在边(vi,vj)∈E 并且假设边的邻接元素满足aij>0,aii=0,则节点i 和节点j 被称为相邻,邻居Ni={jj∈V,(j,i)∈E}。节点i 的对角度定义为di=∑j∈Niaij,度矩阵定义为D={di,…,dN},加权图G 的拉普拉斯矩阵定义为L=D-A。微电网中的N 个DG 以及虚拟领航者DG0 构成新的通信拓扑图G′,定义di为:

2 微电网的二次协调控制
为了补偿初次控制所导致的频率和电压偏离额定值,本文采用分布式二次控制策略来设计新的参考值ωni和vni使得输出ωi和vi恢复至所预设的额定值。微电网的二次协调控制采用多智能体系统的追踪一致性,使得系统频率和输出电压达到给定参考值。二次协调控制方案如图2 所示,给定一个agent 0 的虚拟领航者,为控制器提供参考值。只有少数agent 需要与虚拟领航者之间相互通信,其他的DG 不依靠中央处理器,而是利用自身和邻居agent 的反馈信息进行协调控制以使得系统电压、频率恢复额定值。
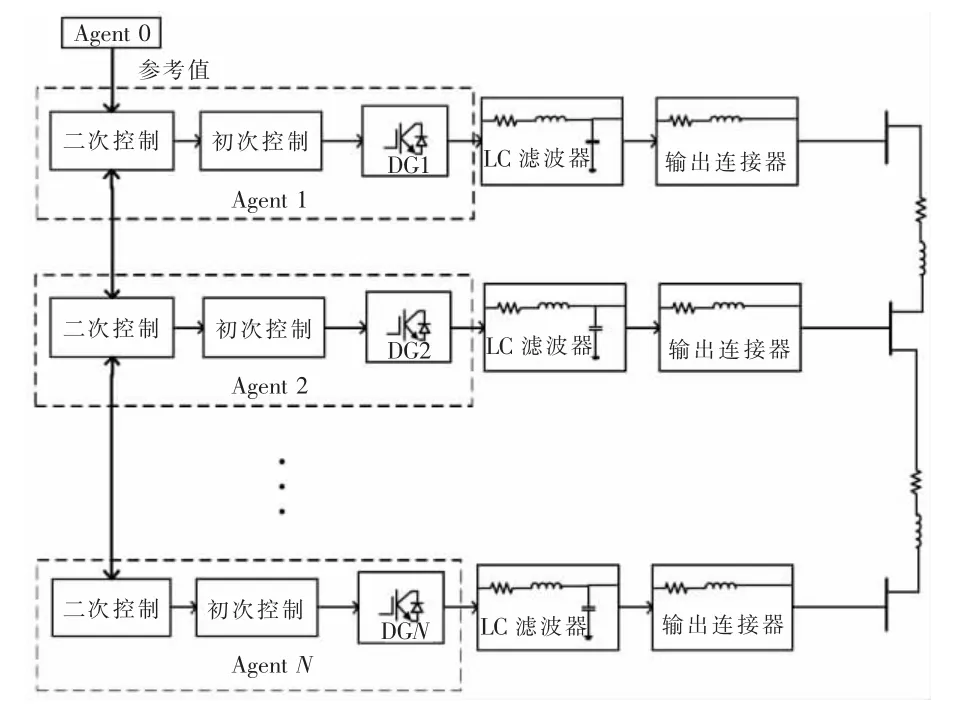
图2 二次协调控制方案
2.1 二次频率控制及有功功率分配
二次频率控制以及有功功率分配的目的是设计一次频率控制参考值ωni作为下垂控制的频率输入,即通过设计下垂控制的频率参考值来使每个DG 的输出频率ωi恢复到额定值,如图3 所示。从式(1)中选择控制输入ωni进行二次控制,首先通过使用输入输出反馈线性化方法[8],对下垂方程(1)求导以获得输入ωni的动态系统

式中:uωi(t)为引入的频率辅助控制器;eωi(t)为频率测量误差;kωi>0。
实现二次频率控制的同时,还需实现按比例分配有功功率:

图3 二次频率协调控制框图

引入有功功率辅助控制器upi(t):
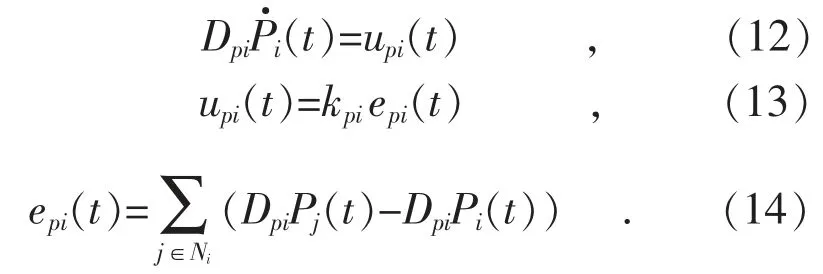
式中:upi(t)为引入的有功功率辅助控制器;epi(t)为有功功率测量误差;kpi>0。
由式(8)和式(12)可得:

进一步可知一次频率控制参考值ωni为:

2.2 二次电压控制
二次电压协调控制是设计一次电压控制参考值vni作为下垂控制的电压输入(如图4 所示),通过设计初次控制中的一次电压参考值vni来使每个DG 的输出电压幅值恢复到额定值。对电压无功功率下垂方程(2)求导,可得输入vni的动态系统:

式中:uvi(t)为引入的电压辅助控制器;evi(t)为电压测量误差;kvi>0。
根据式(17)可得:

进一步可知一次频率控制参考值vni为:

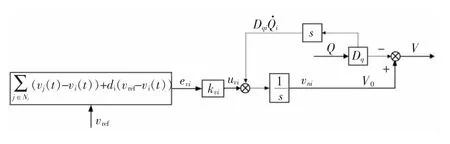
图4 二次电压协调控制框图
3 基于事件触发控制的二次协调控制
上述二次协调控制虽然可以使得系统的稳态频率和电压达到无差,但需要相邻的DG 间进行周期通信。特别是当系统处于稳态,控制信号变化不大时,此通信方式不是必要的,并且占用了大量的通信资源。本节介绍一种非周期通信的分布式事件触发控制方式,该控制机制基于Lyapunov 稳定性理论,仅当DG 的状态满足所设计的事件触发函数时才发生通信且更新控制输出,其余时刻的控制输出为上一触发时刻的控制输出,从而减少了DG 之间的通信次数,在一定程度上节约了通信资源。
3.1 事件触发控制要求
事件触发控制的设计关键在于事件触发函数的设计,设计结果需要满足以下两方面:
(1)一致性稳定要求[20]。不能过多影响控制性能,在本文中即为不能影响微电网稳态频率和电压达到期望额定值。
(2)可行性要求。与传统的固定通信方式不同,事件触发控制是在达到触发条件时进行信号采样和传递,因此就有可能会在有限时间内无限次地触发(Zeno 现象),这对于通信资源和设备都是不可取的。因此需要证明任意两次事件触发之间存在一个时间间隔下界,即可排除Zeno 现象。
3.2 基于事件触发的二次协调控制设计
为了降低DG 之间对通信网络的要求和依赖程度,本文用频率状态估计器中各DG 频率状态估计值代替式(10)中的实际值,得出频率分布式控制协议如下:

式中:上标“^”表示相应变量的估计值。

式中:lωi表示第i 个DG 的频率控制器发生第l次事件触发。
定义频率误差信号εωi(t):

当||εωi(t)||达到事件触发条件时,事件就会被触发,状态估计器就等于实际值,且同时更新为零。然后随着事件的推移,||εωi(t)||会增加,直到下一个事件触发时刻的到来,上限慢慢收敛到零。在事件触发时间间隔内,DG 之间是不需要通信的,上限是通过事件触发函数来确定。在本文中,每个DG 都有自己的触发函数,仅使用本地和邻居的信息进行定义。
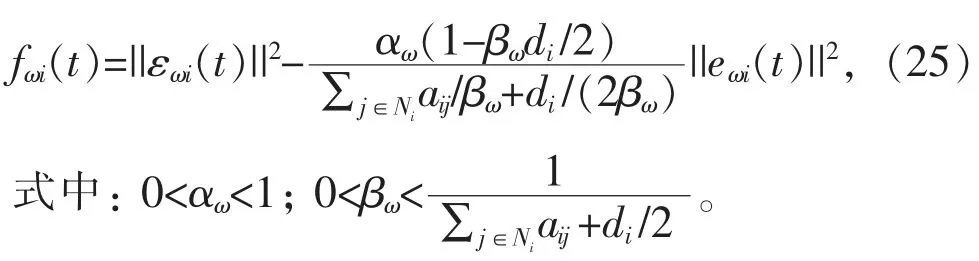
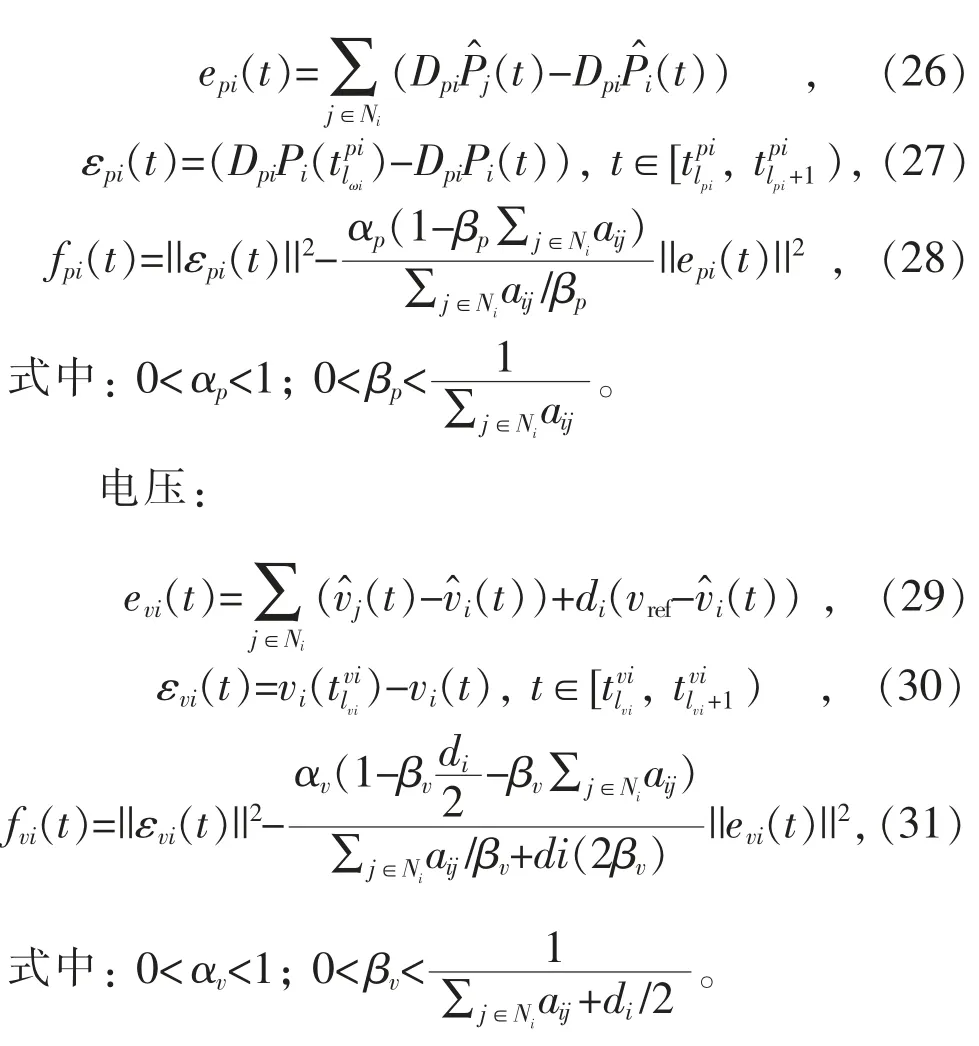
对于二次频率的分布式事件触发函数:
同理,有功功率和电压的分布式控制协议、误差信号以及分布式事件触发函数如下:
有功功率:
3.3 基于事件触发的二次控制流程实现
通过上述分析,基于事件触发的二次协调控制框图如图5 所示。
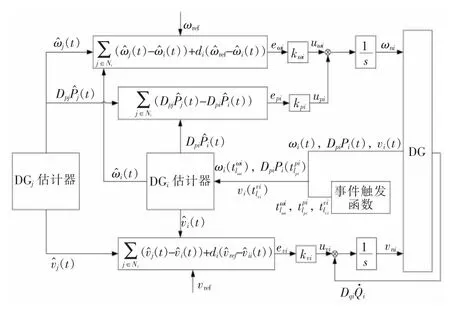
图5 分布式事件触发二次协调控制框图
由于每个DG 需判断是否符合事件触发条件来决定传输何种信号给自身以及相邻DG,因此给出第i 个DG 的频率、有功功率以及电压的两次事件触发时刻之间的流程图,更具代表性。
4 仿真分析
为验证本文提出的基于事件触发的分布式二次协调控制策略的有效性,在MATLAB/Simulink中搭建如图6 所示孤岛微电网模型。该模型包含4 个DG 且额定输出电压幅值为380 V、额定频率为50 Hz(100 π rad/s),相关参数见表1—3。
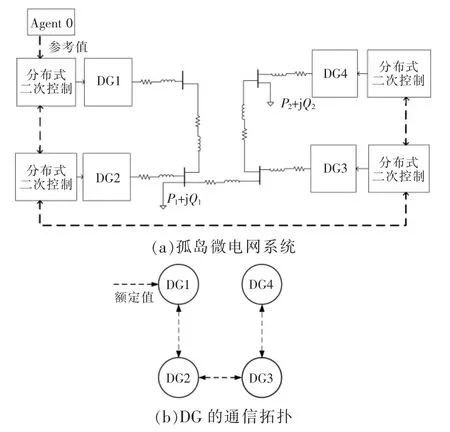
图6 孤岛微电网测试系统
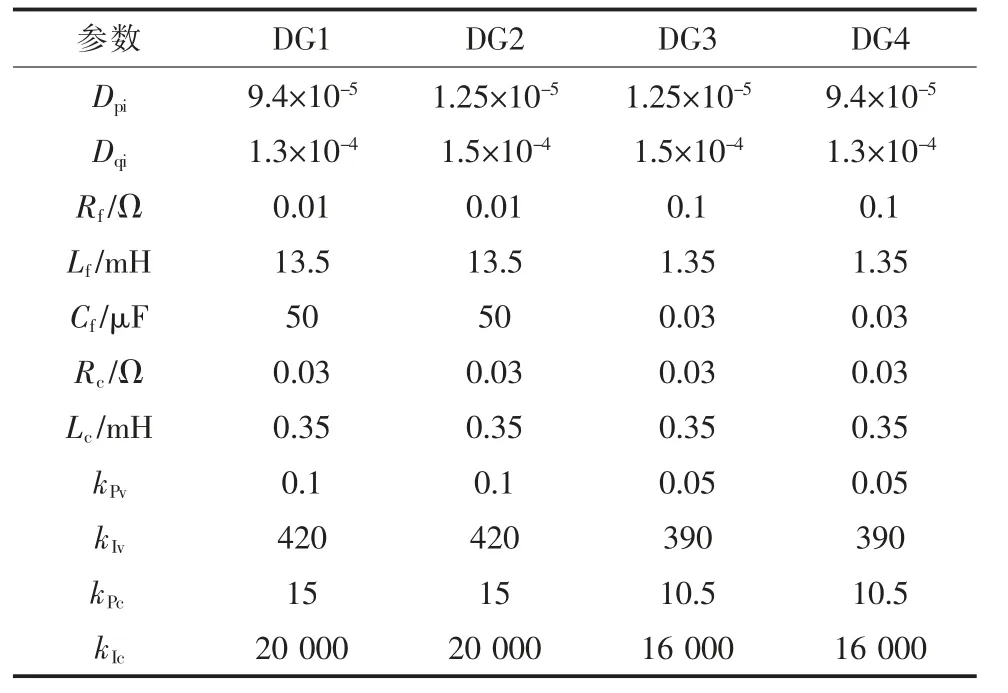
表1 微电网系统DG 参数值
为测试所提策略的动态响应特性,将仿真过程分成两个阶段:在0~3 s 初次控制,仅采用下垂控制;在3~10 s 时加入二次控制,且在7 s 时负荷发生切换。
同时进行两组工况测试:在仿真为3 s 时不加入事件触发控制;在仿真为3 s 时加入事件触发控制。

表2 微电网系统线路参数

表3 微电网系统负载参数
4.1 二次协调控制
工况一:在t=3 s 时不加入事件触发控制,输出波形仿真结果如图7 所示。
图7 为传统分布式控制输出波形,图7(a)和图7(b)中,在t=3 s 之前,虽然仅靠一次下垂控制可使系统的频率一致,但低于工频100 π rad/s,输出电压以及功率达到稳定,但电压无法稳定在380 V,所以下垂控制会使系统产生稳态偏移。在t=3 s 时,加入二次控制后,使得系统频率渐渐稳定到额定频率,输出电压也稳定到额定电压。在t=7 s 时,负荷发生切换后,频率和电压也能迅速稳定到额定值。由图7(c)和图7(d)可以看出,DG输出的有功功率反比于下垂系数,实现了有功功率比例分配。说明所提二次协调控制有无负荷切换状态均能有效地无静差控制,同时实现有功功率比例分配。

图7 传统分布式控制输出波形
4.2 基于事件触发的二次协调控制
工况二:在3 s 时加入事件触发控制,输出波形仿真结果如图8 所示。
图8 为事件触发控制的分布式控制输出波形,由图8(a)和图8(b)可知,基于事件触发的二次协调控制仍能实现无差控制。由图8(c)和图8(d)可以看出,加入事件触发控制之后,依旧可以实现有功功率的比例分配。说明所设计的事件触发的二次协调控制能达到实现二次协调控制的目的。
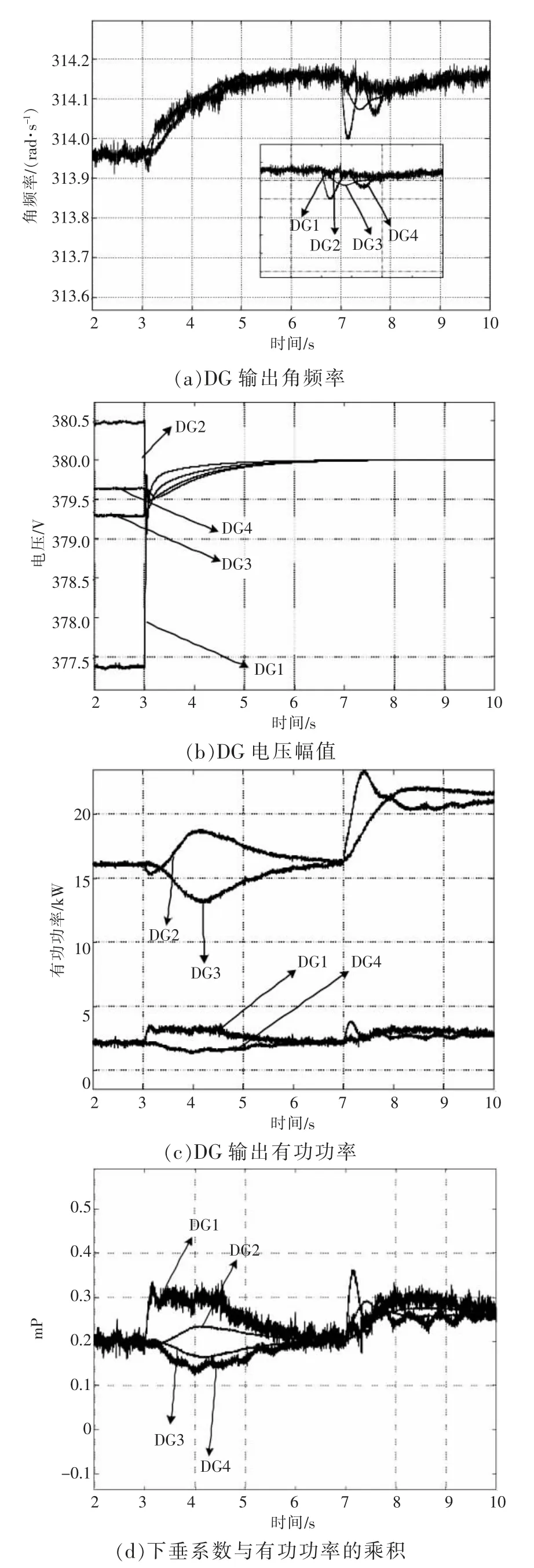
图8 事件触发的分布式控制输出波形
图9 为事件触发时刻,以3~4 s 为例,可知在加入事件触发控制之后,频率、电压和有功功率依靠分布式事件触发控制的离散通信行为可实现信息交换,因此减少了信息交换量,同时降低了对通信网络的要求。
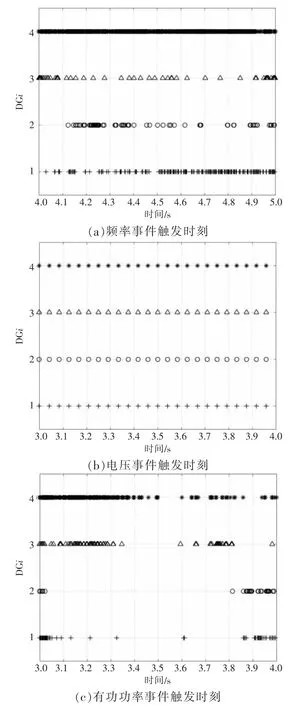
图9 事件触发时刻
图10 为以DG3 为例的传统分布式控制与事件触发分布式控制对比。由图10 可知,基于事件触发的二次协调控制策略下的响应波形与传统控制策略下的响应波形基本相同,仅会产生较小的偏差,说明所设计的策略不会影响系统的响应性能。
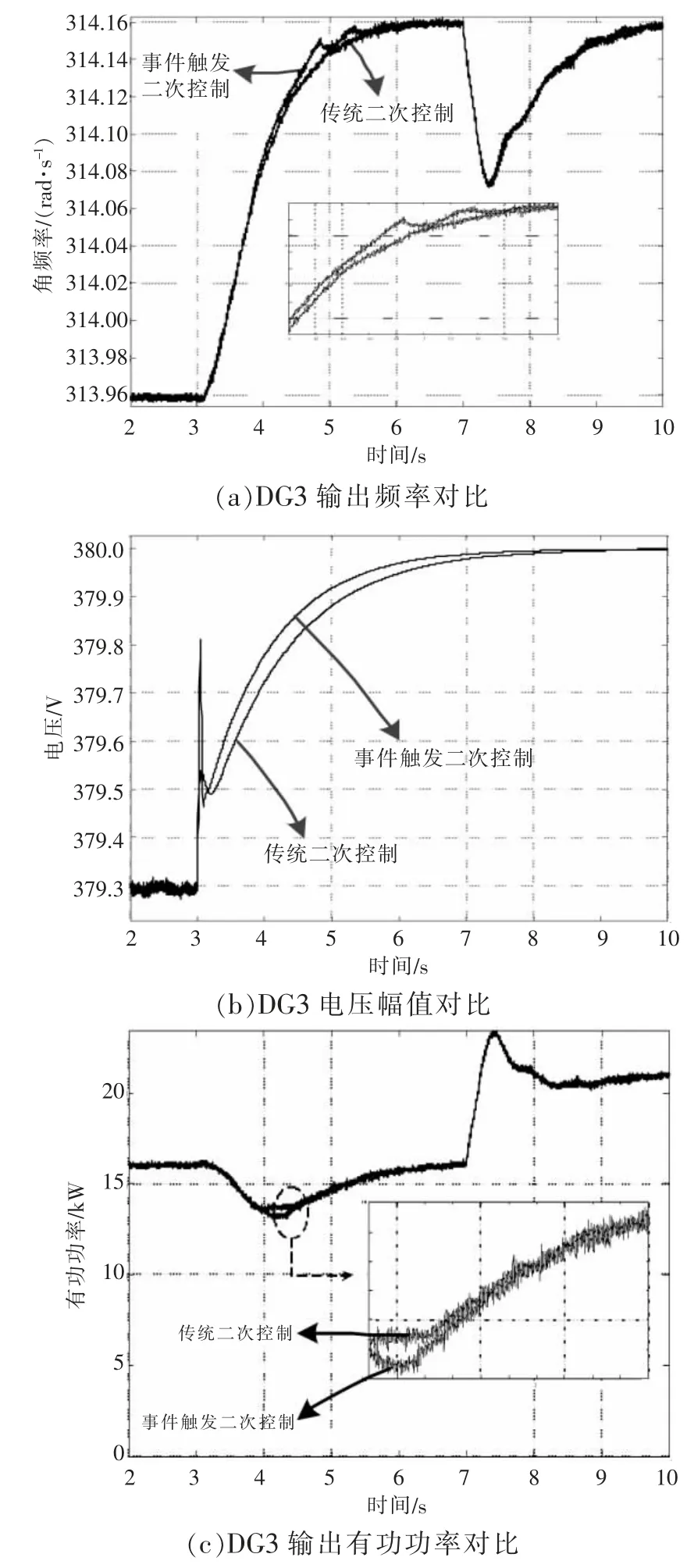
图10 传统二次控制与事件触发二次控制对比
结合图8、图9、图10 可知,在二次协调控制中加入事件触发控制,在保证控制性能的前提下,可减少通信次数,节约通信资源,这对于嵌入式硬件资源具有实践意义。
5 结论
(1)研究了一种孤岛微电网模式下的基于分布式事件触发的二次协调控制,该控制策略在传统下垂控制引起的频率和电压偏移的情况下,能够补偿调节频率和电压恢复至额定值,且实现有功功率比例分配,保证微电网系统的稳定运行。
(2)所提出的分布式事件触发控制机制,在满足系统稳态性能的前提下,利用Lyapunov 稳定理论设计事件触发函数可以减少系统的通信次数,节约通信资源。
(3)所提出的二次协调控制利用多智能体系统一致性原理进行补偿,适用于多微源微网的稳定运行,同时该策略在负载变化引起频率和电压偏移时,能调节至额定值,对系统有较好的鲁棒性。
猜你喜欢
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
医学新知(2019年4期)2020-01-02
能源(2017年10期)2017-12-20
能源(2017年5期)2017-07-06
自动化学报(2017年4期)2017-06-15
雷达与对抗(2015年3期)2015-12-09
电测与仪表(2015年15期)2015-04-12
西南国防医药(2015年7期)2015-02-28
电网与清洁能源(2015年2期)2015-02-28
现代检验医学杂志(2015年1期)2015-02-06
